Изобретение относится к электротехнике и может быть использовано в механизмах с большими моментами инерции и зазорами в зубчатых передачах, например в металлорежущих станках.
Целью изобретения является повышение надежности путем исключения механичес1|сих ударов в зубчатых передачах при выборе зазрров в режимах реверса и торможения, повышение быстродействия электропривода.
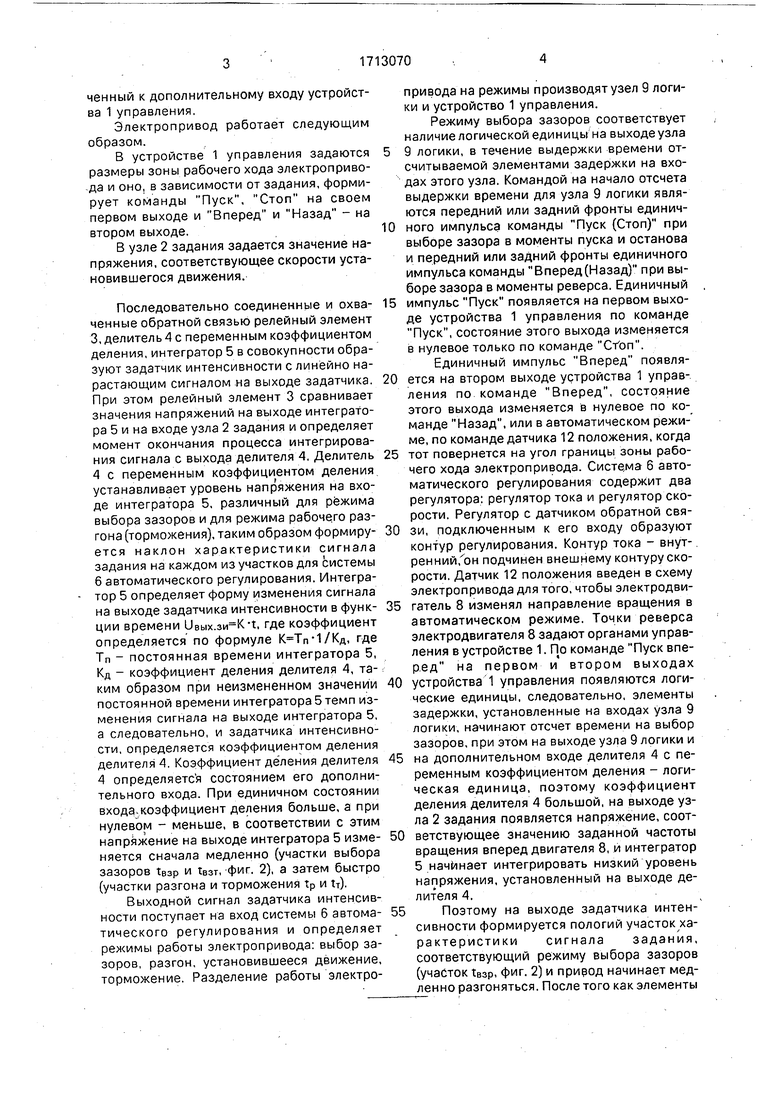
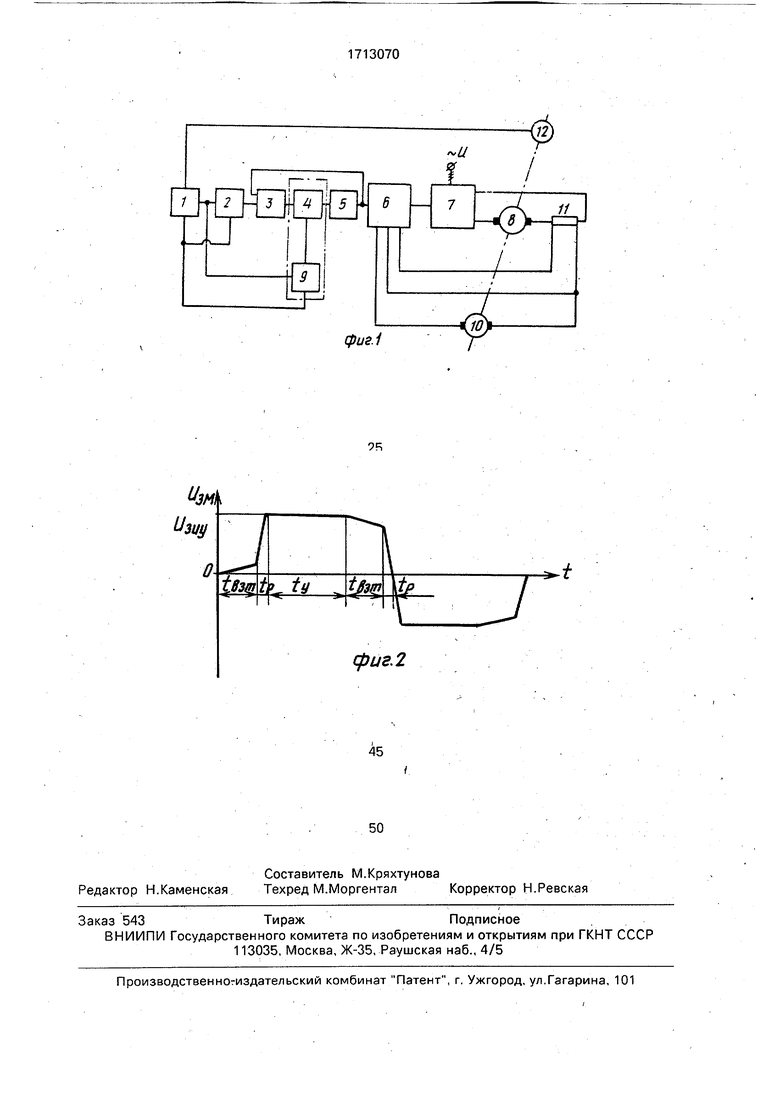
На фиг. 1 представлена схема электропривода; на фиг. 2 ,- диаграмма, поясняющая его работу.
Элeкtpoпpивoд постоянного, тока содержит последовательно соединенные устройство 1 управления, узел 2 задания.
релейный элемент 3, делитель 4 с переменным коэффициентом деления, интегратор 5, выход которого подключен к входу системы .6 автоматического регулирования, соедиСА) ненной с входам тиристорного преобразоОвателя 7, к выходу которого подключен
iVi электродвигатель 8. Электропривод содерiOжит также узел 9 логики, вь1ход которого соединен с дополнительным входом делителя 4, а два входа снабжены элементами временной задержки и соединены с первым и вторым выходами устройства 1 управления, второй выход устройства управления 1 соединен также с дополнительным входом узла 2 задания, датчик 10 обратной связи, датчик 11 тока, подключенные к соответствующим усилителям системы 6 автоматического регулирования, датчик 12 положения, подключенный к дополнительному входу устройства 1 управления.
Электропривод работает следующим образом.
В устройстве 1 управления задаются размеры зоны рабочего хода электропривода и оно, в зависимости от задания, формирует команды Пуск, Стоп на своем первом выходе и Вперед и Назад - на втором выходе.
В узле 2 задания задается значение напряжения, соответствующее скорости установившегося движения.
Последовательно соединенные и охваченные обратной связью релейный элемент 3, делитель 4 с переменным коэффициентом деления, интегратор 5 в совокупности образуют задатчик интенсивности с линейно нарастающим сигналом на выходе задатчика. При этом релейный элемент 3 сравнивает значения напряжений на выходе интегратора 5 и на входе узла 2 задания и определяет момент окончания процесса интегрирования сигнала с выхода делителя 4, Делитель 4 с переменным коэффициентом деления устанавливает уровень напряжения на входе интегратора 5, различный для режима выбора зазоров и для режима рабочего разгона (торможения), таким образом формируется наклон характеристики сигнала задания на каждом из участков для системы 6 автоматического регулирования. Интегратор 5 определяет форму изменения сигнала на выходе задатчика интенсивности в функции времени ивых., где коэффициент определяется по формуле К Тп1/Кд, где Тп - постоянная времени интегратора 5, Кд - коэффициент деления делителя 4, таким образом при неизмененном значении постоянной времени интегратора 5темп изменения сигнала на выходе интегратора 5, а следовательно, и задатчика интенсивности, определяется коэффициентом деления делителя 4. Коэффициент деления делителя 4 определяется состоянием его дополнительного входа. При единичном состоянии входа.коэффициент деления больше, а при нулевом - меньше, в соответствии с этим напряжение на выходе интегратора 5 изменяется сначала медленно (участки выбора зазоров Твзр и Гвзт, фиг. 2), а затем быстро (участки разгона и торможения tp и tr).
Выходной сигнал задатчика интенсивности поступает на вход системы 6 автоматического регулирования и определяет режимы работы электропривода: выбор зазоров, разгон, установившееся движение, торможение. Разделение работы электропривода на режимы производят узел 9 логики и устройство 1 управления.
Режиму выбора зазоров соответствует наличие логической единицы на выходе узла
9 логики, в течение выдержки времени отсчитываемой элементами задержки на входах этого узла. Командой на начало отсчета выдержки времени для узла 9 логики являются передний или задний фронты единичного импульса команды Пуск (Стоп) при выборе зазора в моменты пуска и останова и передний или задний фронты единичного импульса команды Вперед(Назад) при выборе зазора в моменты реверса. Единичный
5 импульс Пуск появляется на первом выходе устройства 1 управления по команде Пуск, состояние этого выхода изменяется в нулевое только по команде Cfon.
Единичный импульс Вперед появляется на втором выходе устройства 1 управления по команде Вперед, состояние этого выхода изменяется в нулевое по команде Назад, или в автоматическом режиме, по команде датчика 12 положения, когда
5 тот повернется на угол границы зоны рабочего хода электропривода. Систе,ма 6 автоматического регулирования содержит два регулятора; регулятор тока и регулятор скорости. Регулятор с датчиком обратной свя0 зи, подключенным к его входу образуют контур регулирования. Контур тока - внут-. ренний, подчинен внешнему контуру скорости. Датчик 12 положения введен в схему электропривода для того, чтобы электродвигатель 8 изменял направление вращения в автоматическом режиме. Точки реверса электродвигателя 8 задают органами управления в устройстве 1. команде Пуск впер.ед на первом и втором выходах
0 устройства 1 управления появляются логические единицы, следовательно, элементы задержки, установленные на входах узла 9 логики, начинают отсчет времени на выбор зазоров, при этом на выходе узла 9 логики и
5 на дополнительном входе делителя 4 с переменным коэффициентом деления - логическая единица, поэтому коэффициент деления делителя 4 большой, на выходе узла 2 задания появляется напряжение, соответствующее значению заданной частоты вращения вперед двигателя 8, и интегратор 5 начинает интегрировать низкий уровень напряжения, установленный на выходе делителя 4.
5 Поэтому на выходе задатчика интенсивности формируется пологий участок характеристики сигнала задания, соответствующий режиму выбора зазоров (участок Гвзр, фиг. 2) и природ начинает медленно разгоняться. После того как элементы
задержки, установленные на входах узла 9 логики, отсчитают выдержку времени на вбор зазора, состояние выхода узла 9 логики изменится из 1 в О, поэтому коэффициент деления делителя 4 уменьшится, что приведет к увеличению уровня напряжения на входе интегратора 5, это, в свою очередь, приведет к тому, что на выходе задатчика интенсивности сигнал начнет резко изменяться - так формируется крутой участок характеристики сигнала задания (участок tp, фиг. 2).
Частота вращения электропривода резко увеличивается. В момент когда величины напряжений на выходах узла 2 задания и интегратора 5 сравняются, на выходе релейного элемента 3, а значит и на входе интегратора 5 устанавливается значение напряжения, равное нулю. Поэтому на выходе интегратора 5 прекращается изменение сигнала. И электропривод вращается с установившейся частотой вращения (участок ty, фиг. 2).
Когда датчик 12 положения повернется на угол границы рабочей зоны, на втором выходе устройства 1 управления установится напряжение логического нуля, команда Назад. Поэтому на дополнительном входе узла 2 задания и на втором входе узла 9 логики устанавливается напряжение Логического нуля. Следовательно на выходе узла 2 задания устанавливается уровень напряжения, соответствующий значению заданной частоты вращения назад, а на выходе узла 9 логики устанавливается напряжение логической единицы, поэтому коэффициент деления делителя 4 большой, элемент задержки, установленный на втором входе узла 9 логики, начинает отсчет выдержки времени на выбор зазоров. На выходе интегратора 5 напряжение начинает медленно уменьшаться (участок tear, фиг. 2). После того как элемент задержки отсчитает выдержку времени на выходе узла 9 логики установится низкий уровень напряжения и коэффициент деления делителя 4 уменьшится, следовательно, напряжение на выходе интегратора 5 начинает резко уменьшаться (участок Тт, фиг. 2). Введением полого участка в характеристику сигнала задания для системы автоматического регулирования достигается выбор зазоров с малой частотой вращения якоря электродвигателя, этим устраняются удары вмеханизмах электропривода в пуско-тормозных режимах. Введением крутых участков разгона и
торможения в характеристику сигнала задания достигается увеличение быстродействия электропривода засчет уменьшения времени выхода на заданную скорость.
Фиксация моментов начала отсчета выдэржки, времени на выбор зазоров по фронту импульсов логических сигналов Вперед, Назад обуславливает независимость работы узла логики от сигналов датчиков обратных связей бистемы регулирования - это позволяет использовать в качестве датчика обратной связи во внешнем контуре регулирования тахогенератор наряду с датчиком напряжения и датчиком ЭДС. Требуемые
наклоны участков характеристики сигнала задания достигаются установкой крэффициентов деления делителя 4, при этом наклоны участков характеристики формируются независимо друг от друга, а длительность участков выбора зазоров устанавливается изменением выдержек времени элементов задержки.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, подключенный к преобразователю, блок управления делителем напряжения, датчик обратной связи внешнего контура регулирования, соединенный с регулятором датчика тока и последовательно соединенные устройство управления, узел задания, задатчик интенсивности, систему автоматического регулирования, выход которой подключен к входу
преобразователя, от л и ч а ю щ и и с я тем, что, с целью повышения надежности путем исключения механических ударов в зубчатых передачах при выборе зазоров в режимах реверса и торможения, в наго
дополнительно введен датчик положения, а задатчик интенсивности содержит последовательно соединенные и охваченные обратной связью релейный элемент, делитель с переменным коэффициентом деления и с
дополнительным входом и интегратор, причем выход блока управления делителем напряжения подключен к дополнительному входу делителя, первый и второй входы блока управления делителем напряжения снабжены элементами временной задержки и соединены с первым и вторым выходами устройства управления соответственно, второй выход которого соединён с дополнительным входом узла задания, вход устройства управления соединен с датчиком положения.
Ы f
(риг.2

| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления механизмом экскаватора | 1978 |
|
SU773212A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Электропривод постоянного тока | 1980 |
|
SU924814A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
| Устройство для управления механизмом передвижения подвешенного на гибкой связи грузозахватного органа | 1979 |
|
SU982300A1 |
| Устройство для частотного пуска и синхронизации с сетью синхронной машины | 1983 |
|
SU1252890A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
Изобретение относится к электротехнике и может быть использовано в механизмах с большими моментами инерции и зазорами в зубчатых передачах. Целью изобретения явля'ется повышение надежности путем исключения механических ударов в зубчатыхпередачах при выборе зазоров в режимах реверса и торможения, повышение быстродействия электропривода. Электропривод содержит последовательно соединенные устройство 1 управления, узел задания 2, релейный элемент 3, делитель 4 с переменным коэффициентом деления, интегратор 5, систему автоматического управления 6, ти- ристорный преобразователь 1. Выход преобразователя 7 соёдине.н с,якорной обмоткой электродвигателя 8. Входы блока 9 управления делителем 4 соединены с выходами устройства 1. Выход блока 9 соединен со входом делителя 4. Изменением коэффициента деления делителя 4 обеспечивается выбор зазоров как при пуске так и при реверсе и торможении. 2 ил.СОс
| Электропривод постоянного тока | 1985 |
|
SU1304159A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
