I
Изобретение относится к цифровой вычислительной технике и может быть иснользовано автономно.
Известно устройство, содержащее мостиковый выпрямитель, составной транзистор, на вход которого через резисторы обратной связи включен составной диод и переменные резисторы для задания величины гидродинамического сопротивления 1 ..
Однако известное устройство имеет низкую (аналоговую) точность моделирования и низкую скорость решения вследствие ручной установки величин гидродинамических сопротивлений.
Наиболее близким к изобретению по технической сущности является устройство, содержащее наборное поле , модели ветвей, входы которых посредством коммутатора соединены с выходами блока вычисления уравновешивающих воздействий, блок памяти сопротивлений ветвей, вход которого подключен к выходу бйока управления и управляющему входу коммутатора, а выход - к входу блока вычисления уравновешивающих воздействий.
зыходы моделей ветвей соединены с группой входов наборного поля и через коммутатор с входами блока вычисления уравновешивающих воздействий 2.
Недостатком известного устройства является низкая точность, определяемая точностью аналоговых вычислительных элементов.
Цель изобретения - повышение точности работы устройства.
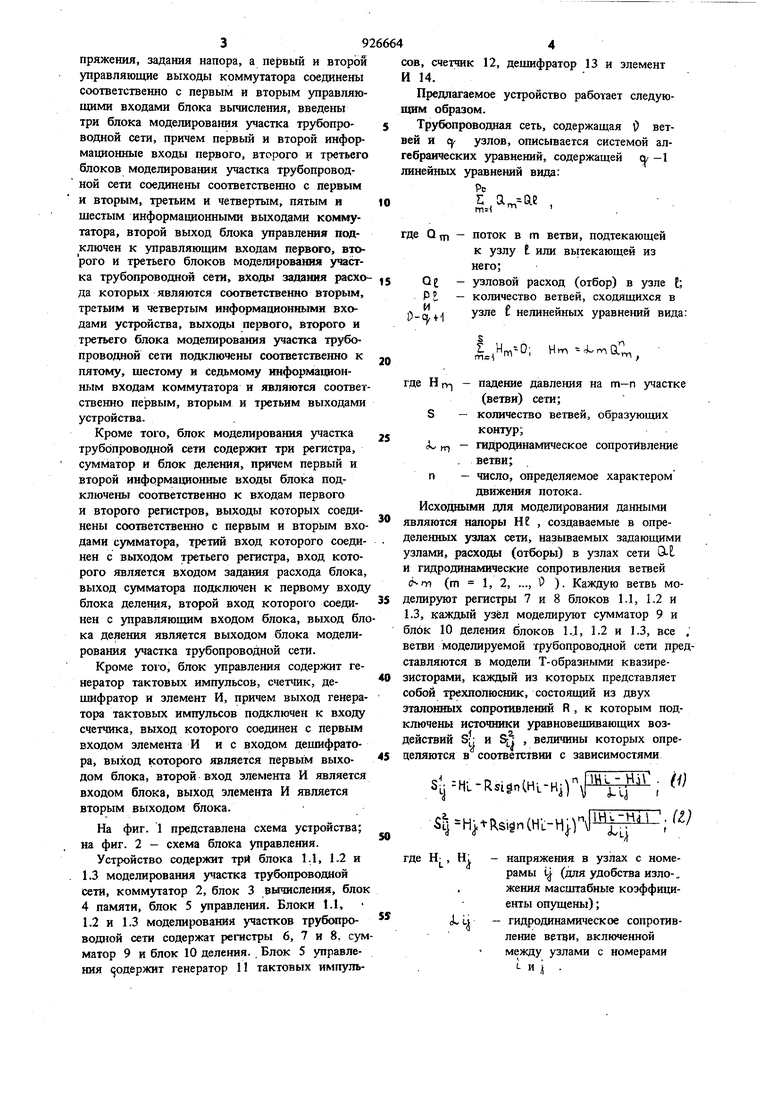
Поставленная цель достигается тем, что в устройство для моделирования трубопроводной сети, содержащее блок управления, вход которого является управляющим входом устройства, первый выход блока управления соединен с управляющим входом коммутатора и с управляющим входом блока памяти,вход которого является первым информационным входом устройства, выход блока памяти подключен к информационному входу блока вычисления первый и второй выходы которого соединены соответственио с первым н вторым информационными входами коммутатора, к третьему и четвертому информационньтм входам которого подключены два источтшка на39пряжения, задания напора, а первый и второй управляющие выходы коммутатора соединены соответственно с первым и вторым управляющими входами блока вычисления, введены три блока моделирования участка трзбопроводной сети, причем первый и второй информационные входы первого, второго и третьего блоков моделирования участка трубопроводной сети соединены соответственно с первым и вторым, третьим и четвертым, пятым и шестым информационными выходами коммутатора, второй выход блока )шравления подключен к управляющим входам первого, второго и третьего блоков моделирования участка трубопроводной сети, входы задания расхода которых являются соответственно вторым, третьим и четвертым информационными входами устройства, выходы первого, второго и третьего блока моделирования участка трубопроводной сети подключены соответственно к пятому, шестому и седьмому информационным входам коммутатора и являются соответ ственно первым, вторым и третьим выходами устройства. Кроме того, блок моделирования участка трубопроводной сети содержит три регистра, сумматор и блок деления, причем первый и второй информационные входы блока подключены соответственно к входам первого и второго регистров, выходы которых соединены соответственно с первым и вторым входами сумматора, третий вход которого соединен с выходом третьего регистра, вход которого является входом задания расхода блока, выход сумматора подключен к первому входу блока деления, второй вход которого соединен с управляющим входом блока, выход бло ка деления является выходом блока моделирования згчастка трубопроводной сети. Кроме Toio, блок управления содержит генератор тактовых импульсов, счетчик, дещифратор и элемент И, причем выход генератора тактовых импульсов подключен к входу счетчика, выход которого соединен с первым входом элемента И и с входом дешифратора, выход которого является первым выходом блока, второй вход элемента И является входом блока, выход элемента И является вторым выходом блока. На фиг. 1 представлена схема устройства; на фиг. 2 - схема блока управления. Устройство содержит три блока 1.1, 1.2 и 1.3 моделирования участка трубопроводной сети, коммутатор 2, блок 3 вычисления, блок 4 памяти, блок 5 управления. Блоки 1.1, 1.2 и 1.3 моделирования участков трубопроводной сети содержат регистры 6, 7 и 8, сум матор 9 и блок 10 деления. Блок 5 управления (одержит генератор 11 тактовых импульсов, счетчик 12, дешифратор 13 и элемент И 14. Предлагаемое устройство работает следующим образом. Тр)гбопроводная сеть, содержащая ) ветвей и (у узлов, описывается системой алгебраических уравнений, содержащей а -1 линейных уравнений вида: ., где Q тл поток в m ветви, подтекающей к узлу t или вьпекающей из него; узловой расход (отбор) в узле Е; количество ветвей, сходящихся в узле t нелинейных уравнений вида: Hm--J a7 где Н rv) - падение давления на m-n участке (ветви) сети; S - количество ветвей, образующих контур; L fT) - гидродинамическое сопротивление ветви; п - число, определяемое характером движения потока. Исходными для моделирования данными являются напоры НЕ , создаваемые в определенных узлах сети, называемых задающими узлами, расходы (отборы) в узлах сети 0-1 и гидродинамические сопротивления ветвей tNy) (m 1, 2, ..., О ). Каждую ветвь моделируют регистры 7 и 8 блоков 1.1, 1.2 и 1.3, каждый узел моделируют сз мматор 9 и блбк 10 деления (блоков 1..1, 1.2 и 1.3, все . ветви моделируемой трубопроводной сети представляются в модели Т-образными квазирезисторами, каждый из которых представляет собой трехполюсник, состоящий из двух эталонных сопротивлений R , к которым подключены источники уравновешивающих воздействий sj; и Sjj , величины которых определяются в соответствии с зависимостями s; Hl-RsignCHL-H P p4 H Rsign(Hl-H|) где Н -напряжения в узлах с номерамы t| (для удобства изложения масщтабные коэффициенты опущены); -гидродинамическое сопротивление ветви, включенной между узлами с номерами «k уравновешивание аналоговой модели закл чается в последовательном определении для каждого квазирезистора по формулам (1) и (2) уравновешивающих воздействий Sij и 8ц , и ввода их в модель автоматически или вручную. Итерационный нроцесс ввода уравновеишвающих воздействий сходится, как правило, за несколько итерацда. Узловы напряжения узлов при уравновешивании модели получаются практически мгаовенно. Та ким образом, в устройстве уравновешиваю1цие воздействия Su и 8ц вычисляются ал горитмически, в соответствии с выражениям (1) и (2), а узловые напряжения неалгорит мически реализуются устройством. Напряжения узлов в то же время, в соответствии с методом узловых потенциалов, могут быт вычислены по формулам: Ч , f Пг-2.0 ц - .y -qt, . (If) г&1 Н - З1ц - SVsr-ui. , (5) ч . г где G 1 или полагая R 1, получаются уравнения Н - Siz Siv-QLa . () Иг-2,6- f. м - 51.ълЦм-0 ъ . I U - sy s.s -а. fij 1Ч-2.(J
Уравновешивающие воздействия вычисляются по формулам (1) и (2), узловые напоры - по формулам (6), (7) и (8).
В общем случае напор узла с номером i может быть вычислен по формуле
(9)
П1L - сумма уравновешивающих
воздействий, инцидентных узлу i (запись S-A означает, что в сумме присутствует одно из двух уравновешивающих воздействий каждой ветви, т.е. либо SLL либо 5ц| ); - количество ветвей, инцидентК
ных узлу с номером к Таким образом, из формулы (9) следует, что модель узла трубопроводной сети может
$2,,-Нг-5 |п(Нг-Нз Г
Sb-Hz signCH.-H lfSrEBS-.
которые через коммутатор 2 записываются в регистры. и 8 соответствующего блока 1.1, 1.2 или 1.3. Аналогично вычисляются
VIL
уравновешивающие воздействия , S,i( 8ц 5 , которые формируются на выходах блока 3 вычисления уравновешивающих воздействий и записываются через коммутатор 2 в соответствующие регистры 7 и 8. В сумматорах 9 формируются
Хг. 5; г- 5и-аг. ; f/O)
Хл-$г.,,ц-аь . W
I
ч 5,.ц . 02)
/
которые поступают на входы соответствующ блоков 10 деления. На , м такте работы 46 быть предствлена в виде сумматора и блока деления. В блок 4 памяти по входу записьшаются величины гидродинамических сопротивлений ,, i-b,4 ; .5 ветвей. В регистры 6 записьтаются величины узловых расходов Q2,.Qi, иО,. Тактовый импульс поступает с выхода генератора 11 тактовых импульсов на вход счетчика 12, на выходе дешифратора 13 в соответствии с двоичным кодом, поступающим на его вход с выхода счетчика 12, появляется единичный сигнал. Этот сигнал поступает на управляющий вход коммутатора 2 и на вход блока памяти 4. По этому сигналу двоичный код, соответств)тощий гидродинамическому сопротивлению о1,г поступает с выхода блока памяти 4 на вход блока 3 вычисления. Двоичные коды напоров HI. и Hj подаются на входы коммутатора 2. Электрические сигналы, соответствующие нэпорам, поступают на входы блока 3 вычисления, на выходе которого образуются величины 8,г- Н .г - HZ %,f Величина S н,г . с выхода 3 вычисления через коммутатор писывается в регистр 7 блока 1Л. На следующем такте работы устройства сигнал управления с выхода блока 5 управления, поступая на вход, блока памяти и на управляющий вход комм)пгатора 2, вызывает подключение выходов блоков 1.1 и 1.2, соответствующих моделируемым узлам, к входам блока 3 вычисления. Tlo этому же сигналу управления на вход блока вычисления 3 поступает код гидродинамического сопротивление 1,ь ветви. На выходах блока 3 формируются величины 792 устройства (где - число ветвей моделиру емой трубопроводной сети) код на выходе счетчика 12 ветвей совпадает с кодом, поданным на второй вход схемы И, на выходб соторой появляется управляющий сигнал, поступающий на управляющие входы блоков 10 деления. На выходах блоков 10 деления в соответствии с выражениями (6), (7) и (8) формируются напоры Hj, Нз, Н4 узлов, которые поступают на входы коммутатора 2. Далее по вычисленным значениям узловых напоровHj, Нз, Н4 вычисляются по формулам (1) и (2) новые значения уравновешивающих воздействий для всех ветвей сети, по которым, в свою очередь, по формулам (6) (7) и (8) вычисляются новые значения узло вых напоров. Итерационный процесс заканчивается естественным образом, либо при достижении требуемой -точности решения HNi4M, где М - требуемая точность решения; векторы узловых напоров на и Д + 1 итерациях. Введение в устройство новых блоков и организация новых связей между блоками устройства отличает предлагаемое устройство для моделирования трубопроводной сети от известных устройств аналогичного назначения, поскольку устройство позволяет моделировать режим работы разветвленной трубопроводной сети с высокой точ ностью, определяемой длиной разрядной сетк устройства. В то же время предлагаемое уст ройство сохраняет важные достоинства извес ных устройств -. возможность автоматизированного ввода в модель гидродинамических сопротивлений. При предложенной структурной организации .устройства и вышеописанном распределе нии вычислительных функций одновременно с увеличением точности увеличивается надежность устройства вследствие того, что все блоки устройства могут бьггь вьшолнены на цифровой злементной базе, допускающей высокую степень интеграции и более простую настройку. Формула изобретения 1. Устройство для моделирования трубопроводной сети, содержащее блок управлени вход которого является управляющим входом устройства, первый выход блока управл ния соединен с управляющим входом коммутатора и с управляющим входом блока памяти, вход которого является первым информационным входом устройства, выход блока памяти подключен к информационному входу блока вычисления, первый и второй выходы которого соединены соответственно с первым и вторым информационными входами коммутатора, к третьему и четвертому информационным входам которого подключены два источника напряжения, задания напора, а первый и второй управляющие выходы коммутатора соединены соответственно с первым и вторым управляющими входами блока вычисления, отличающееся тем, что, с целью повыщения точности, в него введены три блока моделирования участка трубопроводной сети, причем первый и второй информационные входы первого, второго и третьего блоков моделирования участка трубопроводной сети соединены соответственно с первым и вторым, третьим и четвертым, пятым и шестым информащ1онными выходами коммутатора, второй выход блока управления подключен к управляемым входам первого, второго и третьего блоков моделирования участка трубопроводной сети, входы задания расхода которых являются соответственно вторым, третьим и четвертым информационными входами устройства, выходы первого, второго и третьего блока моделирова;. ния участка трубопроводной сети подключены соответственно к пятому, шестому и седьмому информационным входам коммутатора и являются соответственно первым, вторым и третьим выходами устройства. 2.Устройство по п. 1, о т л и ч а ющ е е с я тем, что блок моделирования участка трубопроводной сети содержит три триггера, сумматор и блок деления, причем первый и второй информационные входы блока подключены соответственно к входам первого и второго регистров, выходы которых соединены соответственно с первым и вторым Входами сумматора, третий вход которого соединен с выходом третьего регистра, вход которого является входом задания расхода блока, выход сумматора подключей к первому входу блока деления, второй вход которого соединен с управляющим входом блока, выход блока деления является выходом блока моделирования участка трубопроводной сети. 3.Устройство по п. 1, о т л и ч а ющ е е с я тем, что блок управления содержит генератор тактовых импульсов, счет- , чик, дешифратор и элемент И, причем выход генератора тактовых импульсов подключен к входу счетчика, выход которого соединен с первым входом .элемента И и с входом дешифратора, выход которого является первым выходом блока, второй вход
992666410
элемента И является входом блока, выходi. Авторское сввдетельство СССР N« 341050
элемента И является вторым выходом блока.кл. G 06 F 15/36, 1972.
Источники информации,моделирование в энергетике. Наукова Думпринятые во внимание при экспертизе5 ка. К., 1977 (прототип).
2. Пухов Г. Е., Кулик М. Н. Гибридное
fZ
13



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для расчета режимов трубопроводных сетей | 1981 |
|
SU1007111A1 |
| Устройство для моделирования трубопроводных систем | 1978 |
|
SU750520A1 |
| Устройство для решения задачи поиска длиннейшего пути | 1983 |
|
SU1206791A1 |
| Устройство для определения оптимальных траекторий | 1983 |
|
SU1223240A1 |
| Устройство для определения характеристик сетей | 1984 |
|
SU1282151A1 |
| Устройство для определения характеристик сетей | 1984 |
|
SU1242980A1 |
| Устройство для моделирования графа | 1985 |
|
SU1278877A1 |
| Устройство для решения уравнений математической физики | 1986 |
|
SU1363260A1 |
| Устройство для решения игровых задач на вычислительных сетях | 1982 |
|
SU1104522A1 |
| Устройство для моделирования направленных графов | 1986 |
|
SU1322304A1 |
Фг/г,г.
