(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УДЛИНЕНИЯ ЗАГОТОВКИ ПРИ ПРАВКЕ РАСТЯЖЕНИЕМ НА ГИДРАВЛИЧЕСКОЙ
{
Изобретение относится к области машиностроения, в частности к конструкции систем управления оборудованием для обработки давлением.
Известно устройство для контроля удлинения заготовки при правке растяжением на гидравлической машине, содержащее соединенные между собой блок задания, удлинения и задатчик программы, связанный с гоповками гидравлической растяжкой машины измерительный мост и исполнительный механизм tl.
Известное устройство не обеспечивает высокого качества правки, поскольку не учитывает упругой составляющей удлинения каждой заготовки.
Цепь изобретения - повышение качества правки за счет учета упругой составляющей удлинения каждой заготовки.
Цепь достигается тем, что устройство для контроля удлинения заготовки при правке растяжением на гидравлической машине, содержащее соединенные между собой блок задания удлинения и задатчик МАШИНЕ
программы, связанный с головками гидравлической растяжной машины измерительный мост и исполнительный механизм, снабжено счетчиком удлинения, схемой сравнения и соединенным с задатчиком программы пороговым элементом, при этом измерительный мост выполнен цифровым с плечами; первым - в виде резистибного датчика давления рабочей жидкости, вторым - в виде постоянного сопротивления, третьим - в виде цифроаналогового преобразователя, четвертым - уравновешивающим в виде аналого-цифрового преобразователя поразрядного уравновешиваний и диагональю моста в виде нуль-органа, причем схема сравнения соединена с выходом аналого-цифрового преобразователя и входом исполнительного механизма, а счетчик удлинения соединен с цифроаналоговым преобразователем и постоянным сопрютивлением.
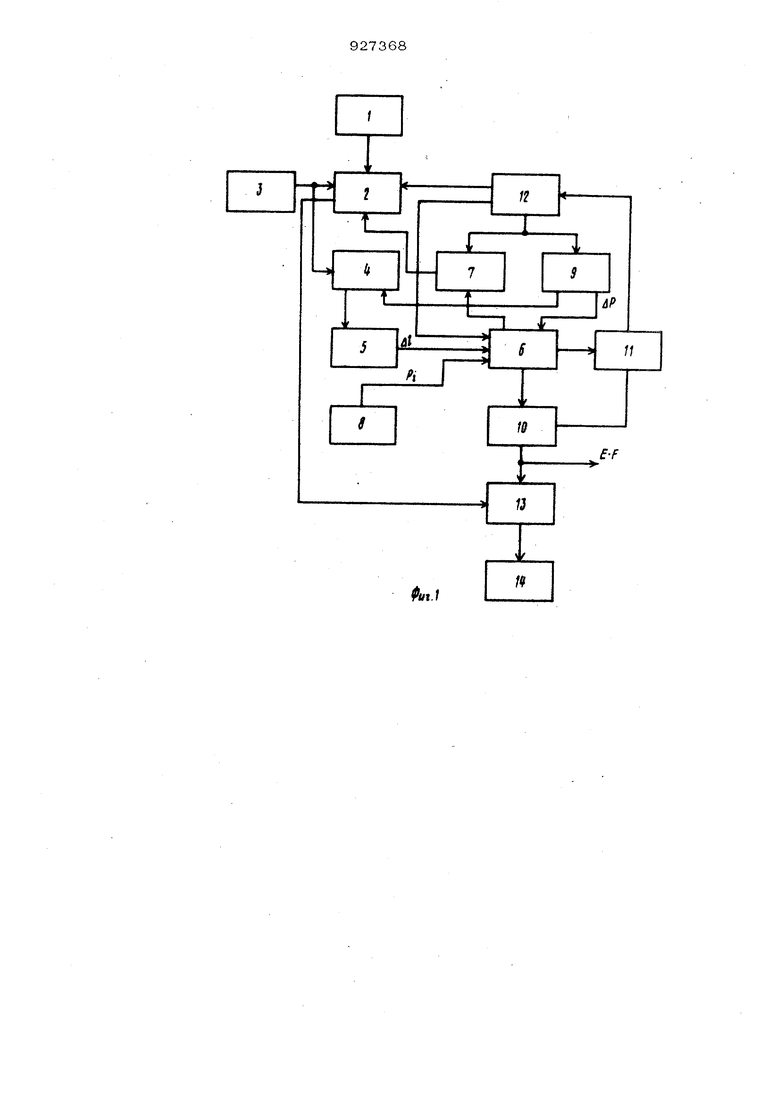
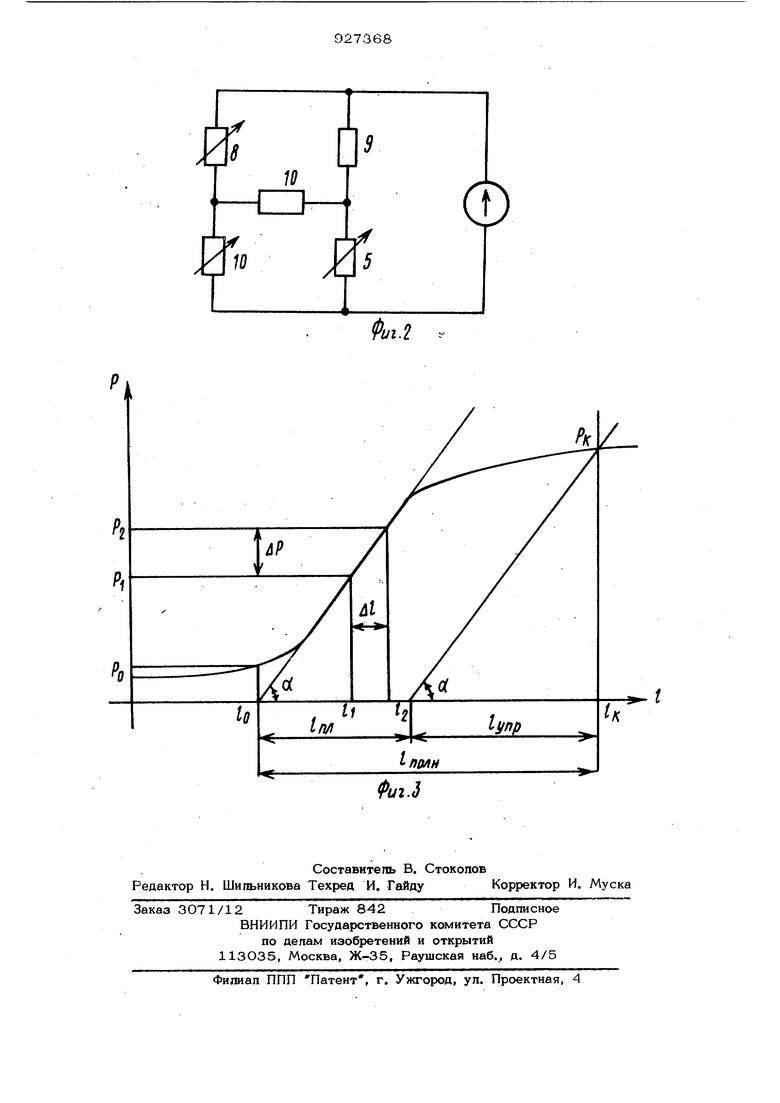
На фиг. 1 приведена функциональная схема; на фиг. 2 - схема измерительного моста; на фиг. 3 - зависимость измерения давления рабочей жидкости в цилиндрах гидравлической растяжной машины . от величины растяжения заготовки.
Предлагаемое устройство содержит блок 1 задания удлинения, реверсивный счетчик 2 импульсов, цифровой датчик 3 перемещения, счетчик 4 удлинения, цифро аналоговый преобразователь (11АП) 5, аналоговую вычислительную схему 6, пороговый элемент 7, резистивный датчик 8 давления, постоянное сопротивление 9 прирашения давления ( ЛР ), аналого-цифровой преобразователь (А11П) 10, нульорган 11, задатчик 12 программы, схему 13 сравнения кодов и исполнительный механизм 14.
Работа устройства основана на вычислении удлинений заготовки в процессе правки растяжением.
Для получения заранее заданного плас тического удлинения необходимо выполнить известные операции вычитания
. V- noAH- nP пр- полн- лл
где поАН полное удлинение;
п - пластическое удлинение; .УпР упругое удлинение. Эти операции осуществляются с помощью реверсивного счетчика 2, в который вводится заданное значение пластического удлинения, а на вход подается информация о текущем значении полного удлинения. После смены знака, информация, записанная в реверсивном счетчика 2, сравнивается с вычисленным значением упругого удлинения. В момент совпадения этих величин, т. е. равенства- действительного пластического удпинения заданному на исполнительный механизм 14 подается сигнал, отключающий привод растя жной головки. При этом на выходе счетчика 2 оказывается записанная информация о величине упругого удлинения, которая также характеризует жесткость обрабатываемого изделия.
Принцип вычисления упругого удлинения поясняется ({мг. 3 ,где изображена известная зависимость изменения давления рабочей жидкости в цилиндрах растяжной мащины в зависимости от величины растяжения.
Из фиг. 3 следует
-е
ТЛ ПОЛН р
где Р - текущее значение давления рабочей жидкости в цилиндрах растяжной машины;
Дб 6( приращение удлинения; Iprp р прирашения давления.
рт-де
Отсюда
е
; др const
ПР др
ИЗ
Из фиг. 3 следует, что R.. «а
Из этих зависимостей видна аналогия между механическими и электрическими парамрами , где соответствует R j aP-f,i COnsi , где R, R, R,R сопротивления плеч моста. Сопротивление R задается резистивным датчиком 8 давления, информация о величине д получается от счетчика 4 удлинения, которая с помощью ЦАП 5 преобразуется в сопротивление . Величина сопротивления 9 R задается из условия нахождения аР в линейной зоне.
Уравновешивание моста производится изменением величины Rj поразрядным уравновешиванием при помощи АЦП 10 и нуль-органа 11.
Устройство работает следующим образом.
С помощью блока 1 задания удгшнения в реверсивный счетчик 2 импугшсов вводится заданное значение пластическрго удлинения (неизменное для определенной партии изделий).
После включения растяжной гидравлической машины, начинается выборка установочной волны изделия, в момент начала деформации происходит резкое повышение давления в гидросистеме машины, которое контролируется резистивным датчиком 8 давления.
При достижении в гидросистеме давления Рд, т. е. момента начала отсчета, происходит разбалансировка измерительно го моста аналоговой вычислительной схемы 6, что вызывает появление сигнала на выходе нуль-органа И, который включает задатчик 12 программы, последний с помощью порогового элемента дает разрешение на счет реверсивному счетчику 2 импульсов, подсчитывающему веггачину перемещения растяжной головки машины с помощью цифрового датчика 3 перемещения, при этом счетчик работает в ре жиме вычитания.
При достижении в гидросистеме давления P-J задатчик программы 12 -(с помощью блоков 8, 6 и 11) через появиВ щийся Р сигнал на постоянном сопротивлении 9 приращения давления ( дР ), вкгоочает счетчик 4 удлинения, который, получая информацию от датчика 3 перемещения, подсчитывает величину удлинения за
период приращения давления дР, при этом величина у длине кия с помощью ЦАП 5 преобразуется в аналоговую форму
При достижении в гидросистеме девпения Р(, т, е. окончания вычислений Др, задатчик 12 программы (с помощью блоков 8, 6 и 11) включает аналогововычислитетшную 6 в режим порогового уравновешивания, которая совместно с АЦП 10 и нуль-органом 11 ведет подсчет текущего значения упругого уд- , ли нения, при этом с выхода АЦП 10 можно снимать сигнал, пропоршонбшьный жесткости изделия (ЕГ).
Информация, записанная в оеверсивном счетчике 2 импульсов, т. е. (( 0 сравнивается с текущим значением ynj гого удлинения в схеме 13 сравнения кодов и в момент равенства действительного пластического удлинения заданному, исполнительный механизм 14 подает ко манду на остановку растяжной головки.
Особенностью работы измерительного цифрового моста является то, что его третье ппечо, образованное сопротивлением ЦАП 5, преобразует в аналоговую форму выходную инфо;ж{аиию счетчика 4 удлинения, который определяет величину перемещения растяжной головки. Последняя кинематически связана с цифровым датчиком 3 Перемещения в течение фиксированного приращения давления.
Измерительный цифровой мост в режиме порогового элемента выполняет также функции фиксатора начала отсчета и порогов фиксированного прирашения давления.
Эффективность использования устройства обеспечивается улучшением каче&тва заготовок за счет повыщения точности их правки.
Формула Изобретения
Устройство дпя контроля удлинения заготовки при правке растяжением на гидравпической мащине, содержащее соедииенные между собой блок задания удлинения и задатчик програк мы, связанный с головками гидравлической растяжной мащины, измерительный мост и исполнительный механизм, отличающееся тем, что, с целью повыщения качества правки путем учета упругой составляющей удлинения каждой заготовки, оно снабжено счетчиком удлинения, схемой сравнения и соединенным с задаткиком программы пороговым элементом, при этом измерительный мост выполнен цифровым с плечами: первым - в виде резистивного датчика давления рабочей
жидкости, вторым - в виде постоянного сопротивления, третьим - в виде цифроаиалогового преобразователя, четвертым уравновещивающим в виде аналого-цифрового преобразователя поразрядного урювновешивания и диагональю моста в виде нуль-органа, причем схема сравнения соединена с выходом аналогоцифрового преобразователя и входом исполнительного механи 4а а счетчик удлинения соединен с цифроанапогоы 1М преобразователем и постоянным сопротивлеиием.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 271851, кл. Q 01 В 19/16, 1970 (прототип).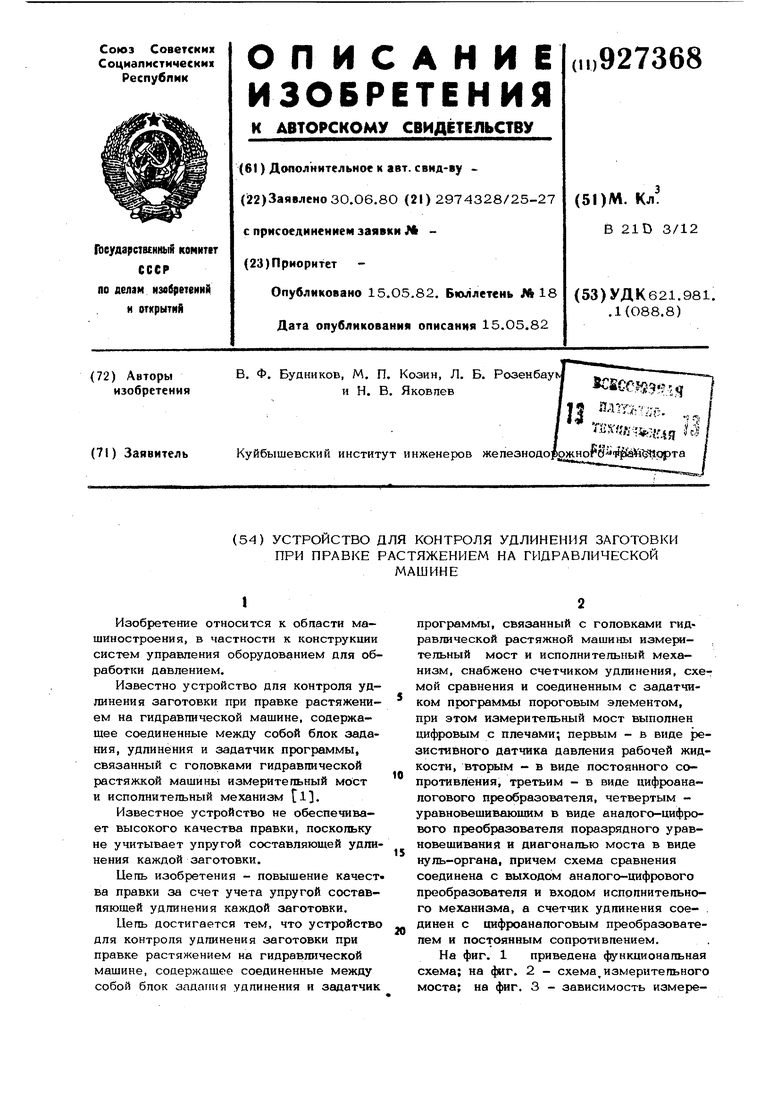
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ правки металлическихиздЕлий РАСТяжЕНиЕМ | 1977 |
|
SU831268A1 |
| Правильно-растяжная машина | 1978 |
|
SU778870A1 |
| Система управления правильно-растяжной машиной | 1983 |
|
SU1174118A1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| ИЗМЕРИТЕЛЬ СОПРОТИВЛЕНИЙ | 2002 |
|
RU2221254C2 |
| Устройство для программного регулирования температры | 1986 |
|
SU1374194A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| ТОПЛИВОМЕР | 1972 |
|
SU427236A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ СЕТЕЙ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2026561C1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |