Изобретение относится к ма|11иностроению и может быть использовано во всех отраслях народного хозяйства для перемещения и фиксации внутри замкнутого объема рабочего органа, например головки робота-гидромонитора, используемого для разгрузки железнодорожных вагонов с пылевидными веществами. Известно устройство для перемещения и фиксации рабочего органа, содержащее силовой цилиндр и соединена ный со штоком сиг:ового цилиндра и рабочим органом узел фиксации положения рабочего органа . Указанное устройство обеспечивает поворот рабочего органа и его Аиксацию в определенном положении l. Недостатком известной конструкции является невозможность осуществления прямолинейного перемещения рабоче го органа и фиксации при прямолинейНОМ перемещении, а также ограниченный угол поворота. Целью изобретения является повышение эксплуатационных возможностей устройства путем обеспечения прямолинейного -перемещения рабочего органа и фиксации при прямолинейном перемещении, а также расширение диапазона угла поворота. Указанная цель достигается тем, что известное устройство для перемещения и фиксации рабочего органа, содержащее силовой цилиндр и соединенный со штоком силового цилиндра и рабочим органом узел фиксации положения рабочего органа, снабжено механизмом поступательного перемещения, выполненным в виде штанги с цилиндрическим хвостовиком на одном конце, диаметр которого меньше диаметра штанги,кронштейна с осью для шарнирного соединения с рабочим органом, в котором установлен цилиндрический хвостовик
штанги, и серьга, шарнирно соединенной со штоком силового цилиндра, кроштейном и штангой, при этом узел фиксации выполнен в виде размещенного в кронштейне подпружиненного пальца, шарнирно соединенного с и серьгой, рычага, корпуса с направляюи ми, в котором размещен второй конец штанги, а также охватывающей штангу и шарнпрно соединенной с серьгой втулки с радиально закрепленным в ней штифтом, причем штанга выполнена с дуговыми диаметрально-противоположными выступами на конце, размещенном в корпусе, и со спиральным пазом на боковой поверхности, корпус выполнен с поперечными пазами на внутрен ней поверхности под упомянутые выступы штанги, а штифт втулки установлен в спиральном пазу.
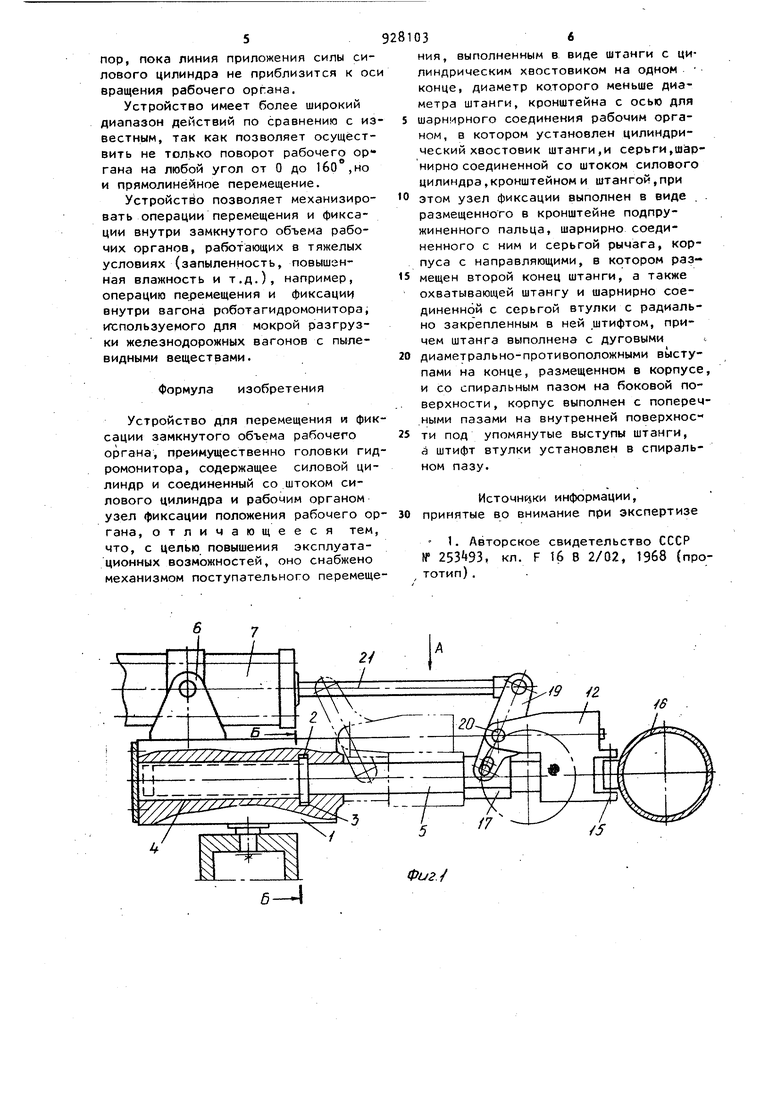
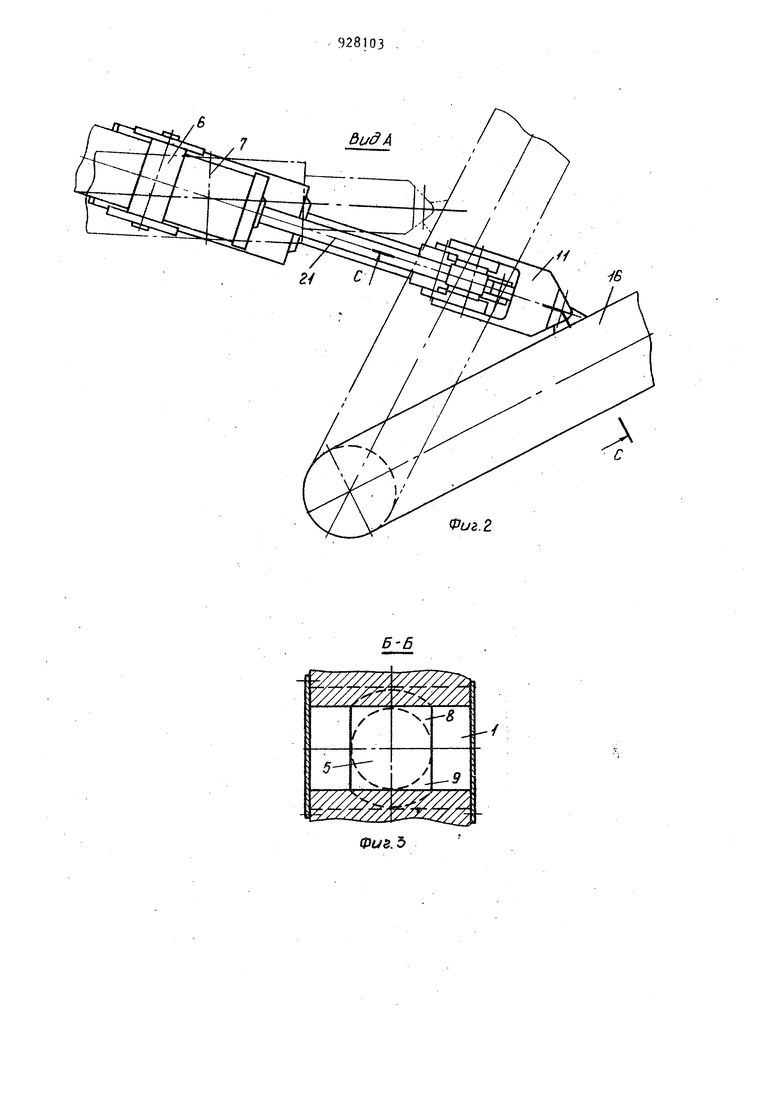
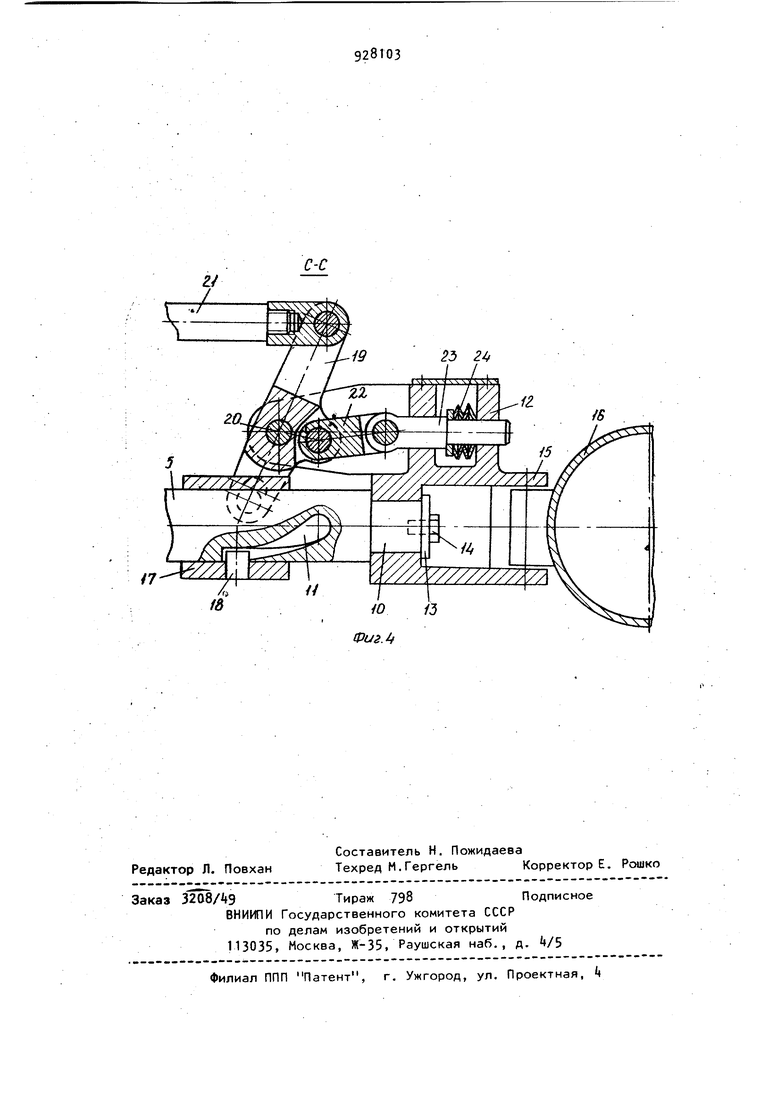
На фиг. 1 изображено устройство для перемещения и фиксации внутри замкнутого объема рабочего органа, общи-й вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. - разрез С-С на фи г. 2. I
Устройство для перемещения и фиксации внутри замкнутого объема рабочего органа содержит корпус 1 с направляющими 2. и поперечными пазами 3 и 4, а котором размещена штан га 5- Нз корпусе 1 закреплена опора 6, в которой установлен силовой цилиндр 7. Штанга 5 выполнена с дуговыми диаметрально-противоположными выступами 8 и 9 на одном конце, цилиндрическим хвостовиком 10, диамелр которого меньше диаметра штанги 5 на противоположном конце, и со спиральным пазом 11 на боковой поверхности. Один конец штанги 5 с выступами 8 и 9 размещен в корпусе 1, а цилиндрический хвостовик установлен радиальным зазором в отверстии кронштейна и зафиксирован от осевого перемещения относительно кронштейна шай бой 13 и болтом И. В кронштейне 12 закреНлена ось 15 для шарнирного соединения с перемещаемым и фиксИруе мым рабочим органом 16. На штанге 5 установлена с возможностью продольного перемещения втулка 17 в радиально закрепленным на ней штифтом 18, размещенным в спиральном Лазу 11 штанги 5. Втулка 17 шарнирно соединена с . серьгой Т9, которая с возможностью вращения установлена на оси 20 кронштейна 12, одним своим концом шарнирно соединена со штоком 21 силового цилиндра 7, а своей средней частьюс рычагом 22, который шарнирно .соединен с пальцем 23, установленным в отверстии кронштейна 12 и подпружинен.ным пружиной 2.
Устройство работает следюущим образом.
Шток 21 силового цилиндра 7 в начале движения действует на серьгу 19, которая одновременно взаимодействует с кронштейном 12 через ось 20 и с подпружиненным пальцем 23 через рычаг 22. Палец 23 остается неподвижным, так как усилие сжатия пружины 2 больше усилия, необходимого для перемещения рабочего органа 16, а штанга и рабочий орган перемещаются до тех пор, пока выступы 8 и 9 штанги не достигнут стенки корпуса 1 .
При упоре 8 и 9 в стенку корпуса штанга 5, связанный с ней кронштейн 12 и рабочий орган 16 останавливаются, а шток 21 силового цилиндра 7 продолжает действовать на серьгу 19. Серьга 19, преодолевая усилие пружины 24, поворачивается на оси 20 и передвигает втулку 17, размещенную на штанге 5, при этом штифт 18, закрепленный на втулке 17 перемещается вдоль спирального паза 11, обеспечивает поворот штанги 5 на 90. Выступы 8 и 9 штанги 5 входят в поперечные пазы 2 и 3 корпуса 1, жестко зафиксировав штангу 5 и связанный с ним рабочий орган 16 от перемещения.
Для вывода рабочего органа из положения фиксации в исходное положение-шток 21 силового цилиндра 7 действует на серьгу 19 в .обратную сторону, серьга 19, преодолевая усилия пружины 2, поворачивается на оси 20 и перемещает втулку 17 со штитом 18 в противоположную сторону до тех пор, пока штанга 5 не повернется на обратном направлении, а выступы 1 и 9 не выйдут из пазов 2 и 3 корпуса 1., После этого штанга 5, кронштейн 12 и рабочий орган 16 возвращаются в исходное положение.
Изменяя длину штанги 5 и соответствующий ей рабочий ход силового цилиндра 7, а также точку крепления кронштейна на рабочем органе, мож. но получить любой угол поворота в пределах от О до 1бО, т.е. до тех пор, пока линия приложения силы силового цилиндра не приблизится к ос вращения рабочего органа. Устройство имеет более широкий диапазон действий по сравнению с из вестным, так как позволяет осуществить не только поворот рабочего органа на любой угол от О до 160°,но и прямолинейное перемещение. Устройство позволяет механизировать операции перемещения и фиксации внутри замкнутого объема рабочих органов, работающих в тяжелых условиях (запыленность, повышенная влажность и т.д.), например, операцию перемещения и фиксации внутри вагона роботагидромонитора, используемого для мокрой разгрузки железнодорожных вагонов с пылевидными веществами. Формула изобретения Устройство для перемещения и фик сации замкнутого объема рабочего органа, преимущественно головки гид ромонитора, содержащее силовой цилиндр и соединенный со штоком силового цилиндра и рабочим органом узел фиксации положения рабочего ор гана, отличающееся тем что, с целью повышения эксплуатационных возможностей, оно снабжено механизмом поступательного перемеще 036 ния, выполненным в виде штанги с цилиндрическим хвостовиком на одном . конце, диаметр которого меньше диаметра штанги, кронштейна с осью для шарнирного соединения рабочим органом, в котором установлен цилиндрический хвостовик штанги,и серьги,laiapнирно соединенной со штоком силового цилиндра,кронштейном и штангой,при этом узел фиксации выполнен в виде . . размещенного в кронштейне подпружиненного пальца, шарнирно соединенного с ним и серьгой рычага, корпуса с направляющими, в котором размещен второй конец штанги, а также охватывающей штангу и шарнирно соединенной с серьгой втулки с радиально закрепленным в ней .штифтом, причем штанга выполнена с дуговыми v диаметрально-противоположными выступами на конце, размещенном в корпусе, и со спиральным пазом на боковой поверхности , корпус выполнен с поперечными пазами на внутренней поверхнос ти под упомянутые выступы штанги, а штифт втулки установлен в спиральном пазу. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР ff , кл. F 16 В 2/02, 1968 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Толкатель верхнего действия для вагонеток | 1984 |
|
SU1191413A1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 1995 |
|
RU2091998C1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| ПЕРЕНОСНОЙ ГИДРАВЛИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ | 1996 |
|
RU2095235C1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2006 |
|
RU2310305C1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| РЫХЛИТЕЛЬ МЕЛИОРАТИВНЫЙ | 1997 |
|
RU2113076C1 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| СПОСОБ ИЗВЛЕЧЕНИЯ КОРНЕВИЩ КОРНЕОТПРЫСКОВЫХ СОРНЯКОВ, ПРЕИМУЩЕСТВЕННО КОРНЕЙ И КОРНЕВИЩ СОЛОДКИ, И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2160524C1 |
1 au 6
