Изобретение относится к автоматическому ре улированию и может быть использовано для регулирования пара-, метров технологических и химических процессов.
Известны автоматические системы, построенные по принципу двухканальных систем регулирования, применяемые для управления технологическими процессами 1 .
Наиболее близким к изобретению является устройство, содержащее последовательно соединенные датчик, регулятор точного канала регулирювания и исполнительный механизм точного канала регулирования, последовательно соединенные регулятор грубого канала регулирования и исполнительный механизм грубого канала регулирования и нелинейный элемент, вход которого соединен с выходом регулятора точного канала 2.
Недостатками такого устройства являются усложнение настройки регуляторов и недостаточная точность регулирования, обусловленные взаимосвязью каналов грубого и точного регулирования через объект.
Цель изобретения - повышение точности регулирования.
Поставленная цель достигаеТся тем, что в предлагаемое устройство введены последовательно соединенные первый сумматор, первый блок умножения и второй сУмматор, а также последовательно соединенные второй блок умножения, элемент задержки и третий сумматор, причем вход первого сумматора соединен с выходом третьего сум10матора и вторым входом регулятора точного канала регулирования, выход второго сумматора соединен с входом регулятора грубого канала регулирования , а второй вход - с выходом нели15нейного элемента и входом второго блока умножения.
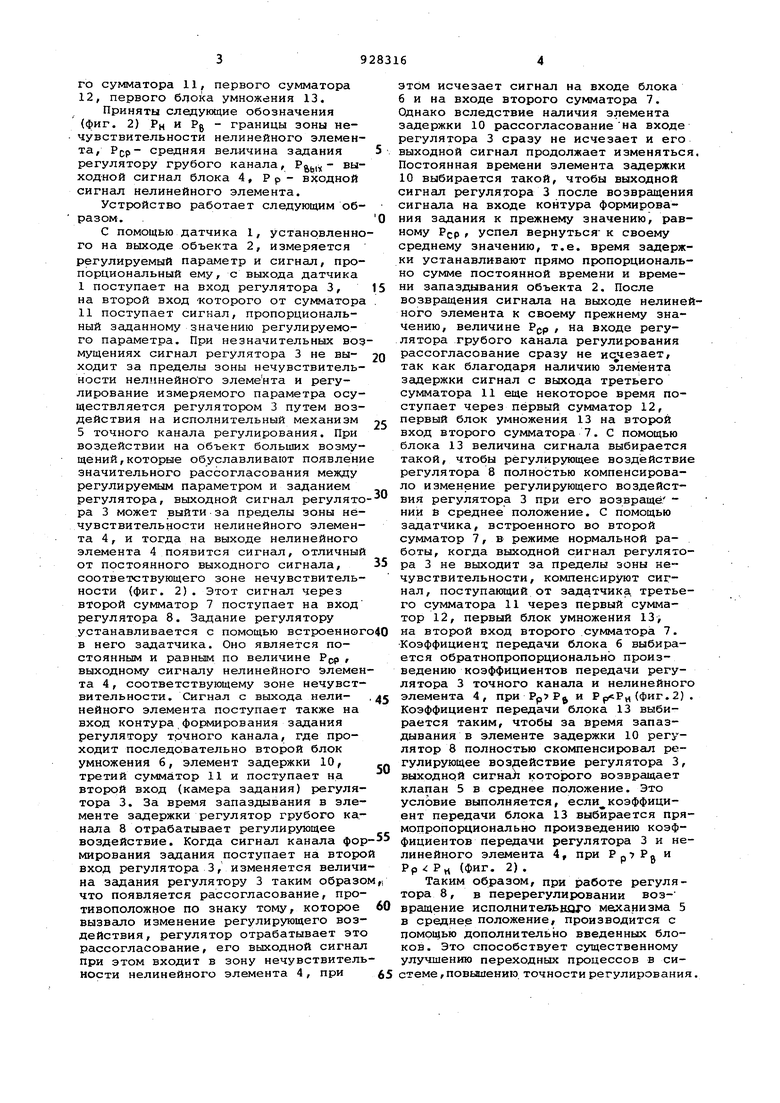
На фиг. 1 представлена блок-схема устройства для автоматического регулирования технологических процессов;
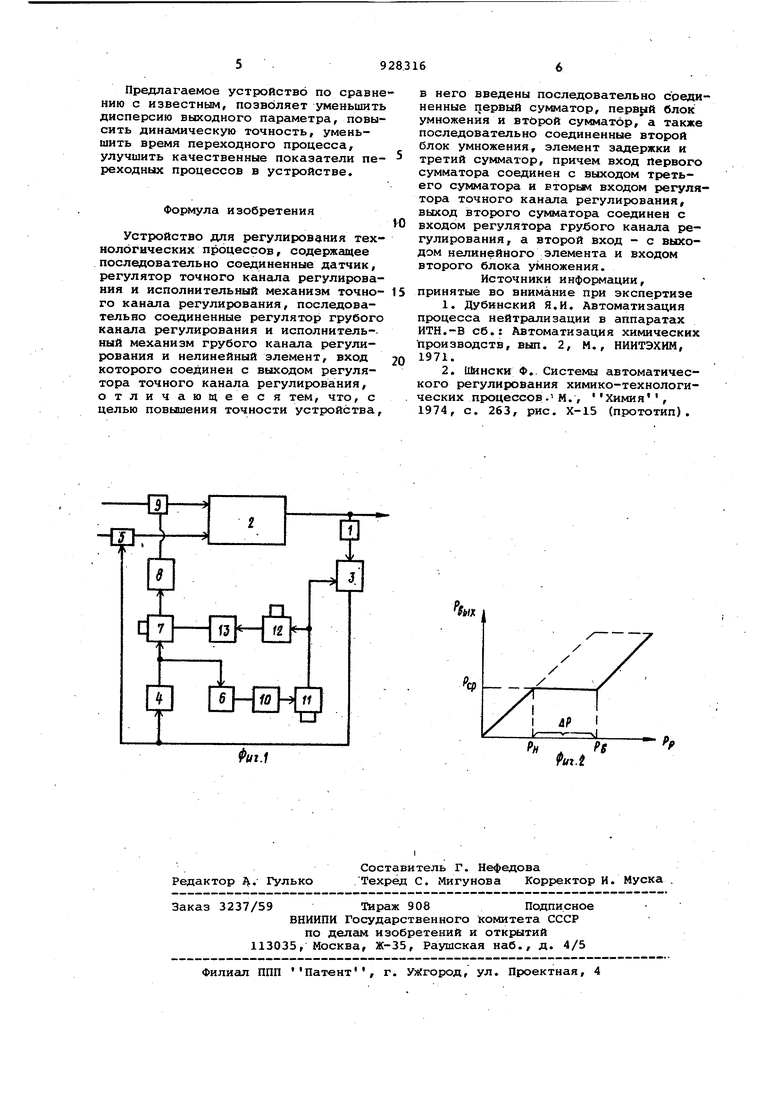
20 на фиг. 2 - статическая характеристика нелинейного элемента.
Устройство состоит из датчика 1, регулируемого парс1метра объекта 2, регулятора 3 точного канала, нели25нейного элемента 4, исполнительного механизма 5 точного канала, второго блока умножения 6, второго сумматора 7, регулятора 8 грубого канала, исполнительного механизма 9 грубого
30 канала, элемента задержки 10, третьего сумматора 11, первого сумматора 12, первого блока умножения 13. Приняты следующие обозначения (фиг. 2) РН и Pg - границы зоны нечувствительности нелинейного элемента, Рср- средняя вел ичина задания регулятору грубого канала, ходной сигнал блока 4, Рр- входной сигнал нелинейного элемента. Устройство работает следующим образом. С помощью датчика 1, установленно го на выходе объекта 2, измеряется регулируемый параметр и сигнал, пропорциональный ему, с выхода датчика Iпоступает на вход регулятора 3, на второй вход которого от сумматора IIпоступает сигнал, пропорциональный заданному значению регулируемого параметра. При незначительных воз мущениях сигнал регулятора 3 не выходит за пределы зоны нечувствительности нелинейного элемента и регулирование измеряемого параметра осуществляется регулятором 3 путем воздействия на исполнительный механизм 5 точного канала регулирования. При воздействии на объект больших возмущений, которые обуславливают появлени значительного рассогласования между регулируемым параметром и заданием регулятора, выходной сигнал регулято ра 3 может выйти за пределы зоны нечувствительности нелинейного элемента 4 , и тогда на выходе нелинейного элемента 4 появится сигнал, отличный от постоянного выходного сигнала, соответствующего зоне нечувствительности (фиг. 2). Этот сигнал через второй сумматор 7 поступает на вход регулятора 8. Задание регулятору устанавливается с помощью встроенног в него задатчика. Оно является постоянным и равным по величине Pjjp , выходному сигналу нелинейного Элемен та 4, соответствующему зоне нечувствительности. Сигнал с выхода нелинейного элемента поступает также на вход контура формирования задания регулятору точного канала, где проходит последовательно второй блок умножения 6, элемент задержки 10, третий сумматор 11 и поступает на втоЕюй вход (камера задания) регулятора 3. За время запаздывания в элементе задержки регулятор грубого канала 8 отрабатывает регулирующее воздействие. Когда сигнал канала фор мирования задания поступает на второ вход регулятора 3, изменяется величи на задания регулятору 3 таким образо что появляется рассогласование, противоположное по знаку тому, которое вызвсшо изменение регулирующего воздействия, регулятор отрабатывает это рассогласование, его выходной сигнал при этом входит в зону нечувствитель ности нелинейного элемента 4, при этом исчезает сигнал на входе блока б и на входе второго сумматора 7. Однако вследствие наличия элемента задержки 10 рассогласованиена входе регулятора 3 сразу не исчезает и его выходной сигнал продолжает изменяться. Постоянная времени элемента задержки 10 выбирается такой, чтобы выходной сигнал регулятора 3 после возвращения сигнала на входе контура формирования задания к прежнему значению, равному РСР, успел вернуться- к своему среднему значению, т.е. время задержки устанавливают прямо пропорционально сумме постоянной времени и времени запаздывания объекта 2. После возвращения сигнала на выходе нелинейного элемента к своему прежнему значению, величине , на входе регулятора грубого канала регулирования рассогласование сразу не исчезает, так как благодаря наличию элемента задержки сигнал с выхода третьего сумматора 11 еще некоторое время поступает через первый сумматор 12, первый блок умножения 13 на второй вход второго сумматора 7. С помощью блока 13 величина сигнала выбирается такой, чтобы регулирующее воздействие регулятора 8 полностью компенсировало изменение регулирующего воздействия регулятора 3 при его возвращё НИИ в среднее положение. С помощью задатчика, встроенного во второй сумматор 7, в режиме нормальной работы, когда выходной сигнал регулятора 3 не выходит за пределы зоны нечувствительности, компенсируют сигнал, поступающий от задатчика. третьего сумматора 11 через первый сумматор 12, первый блок умножения 13, на второй вход второго сумматора 7. Коэффициент передачи блока 6 выбирается обратнопропорциональнЬ произведению коэффициентов передачи регулятора 3 точного канала и нелинейного элемента 4, при Рр Р и (фиг.2) . Коэффициент передачи блока 13 выбирается таким, чтобы за время запаздывания в элементе задержки 10 регулятор 8 полностью скомпенсировал регулирующее воздействие регулятора 3, выходной сигнал которого возвращает клапан 5 в среднее положение. Это условие выполняется, если коэффициент передачи блока 13 выбирается прямопропорционально произведению коэффициентов передачи регулятора 3 и нелинейного элемента 4, при и Рр Р rt (фиг. 2) . Таким образом, при работе регулятора 8, в перерегулировании возвращение исполнительщаго ме ханизма 5 в среднее положение, производится с помощью дополнительно введенных блоков. Это способствует существенному улучшению переходных процессов в системе , повышению точности регулирования. Предлагаемое устройство по сравне нию с известным, позволяет уменьшить дисперсию выходного параметра, повысить динамическую точность, уменьшить время переходного процесса, улучшить качественные показатели пе реходных процессов в устройстве. Формула изобретения Устройство для регулирования технологических процессов, содержащее последовательно соединенные датчик, регулятор точного каигша регулирования и исполнительный механизм точного канала регулирования, последовательно соединенные регулятор грубого канала регулирования и исполнитель-, ный механизм грубого канала регулирования и нелинейный элемент, вход которого соединен с выходом регулятора точного канала регулирования, отличающееся тем, что, с целью повышения точности устройства в него введены последовательно соединенные первый сумматор, перв| й блок умножения и второй сумматор, а также последовательно соединенные второй блок умножения, элемент задержки и третий сумматор, причем вход первого сумматора соединен с выходом третьего сумматора и вторым входом рюгулятора точного канала регулирования, выход второго сумматора соединен с входом регулятора грубого кангша регулирования, а второй вход - с выходом нелинейного элемента и входом второго блока умножения. Источники информации, принятые во внимание при экспертизе 1.Дубинский Я.И. Автоматизация процесса нейтрализации в аппаратах ИТН.-В сб.: Автоматизация химических производств, вып. 2, М., НИИТЭХИМ, 1971. 2.Шински Ф.. Системы автоматического регулирования химико-технологических процессов. М., Химия , 1974, с. 263, рис. Х-15 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления позиционным электроприводом | 1981 |
|
SU993199A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1671694A2 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Устройство для регулирования уровня жидкости в резервуаре | 1988 |
|
SU1679470A1 |
| Устройство для регулирования температуры | 1980 |
|
SU877491A1 |
| Устройство для управления холодопроизводительностью компрессора холодильной машины | 1982 |
|
SU1062198A1 |
| Система экстремального регулирования | 1982 |
|
SU1068890A1 |
| Устройство для регулирования уровня воды на участке канала | 1990 |
|
SU1781674A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
Л«
q.
М f fut.t
