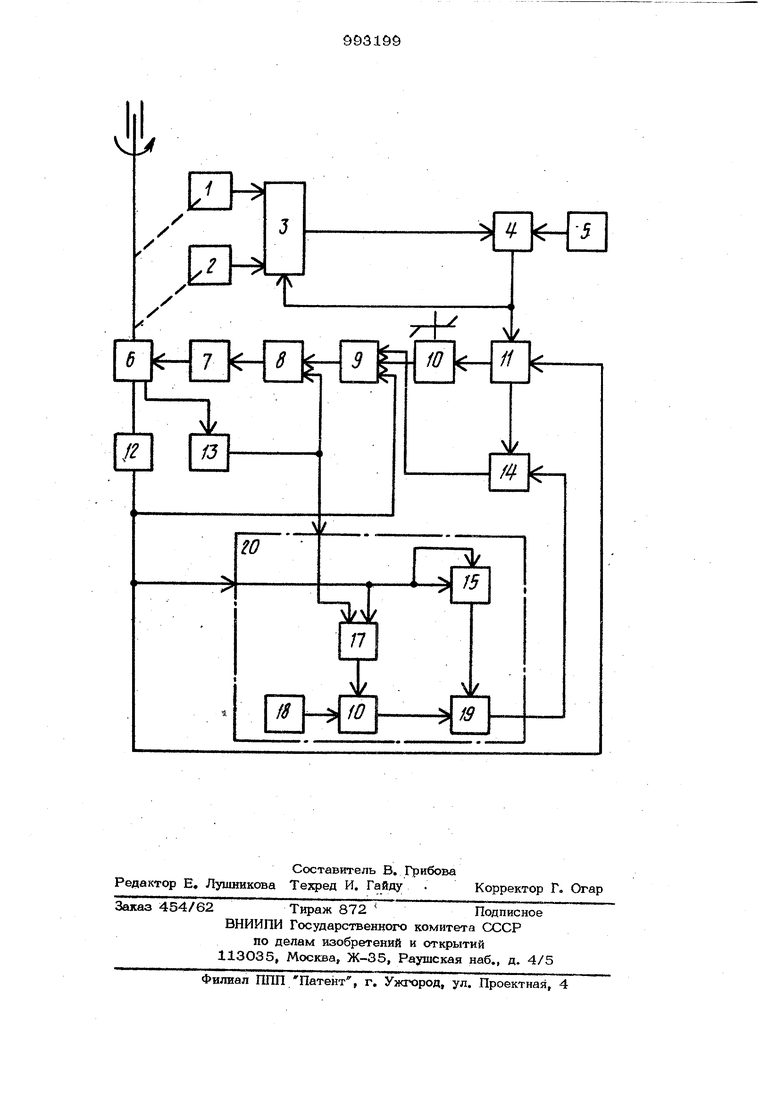
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЗИЦИОННЫМ ЭЛЕКТРОПРИВОДОМ Изобретение относится к управленгаб инерционными объектами в ручном и &в тематическом режимах, и может быть использовано при синтезе непрерывнодискретного управляющего воздействия с различной скоростью в системах управления объектами различного назначения и в система± автоматического регулирования электропривода. Известны двухканальные устройства с грубым и точным каналами отсчета для позиционного управления электроприводами Г13 . Недостатком устройства является не высокая точность. Наиболее близким по технической сущ ности к предлагаемому является устрой. ство для управления позиционным электроприводом, содержащее последователь но соединенные регулятор скорости, регу лятор тока, второй вход которого соединен с датчиком тока, усилитель мощности, выходы которого непосредственно и через датчик тока соединены с входами электродвигателя, вал которого кинемат чески связан с датчиком скорости и пен ложения, выход датчика скорости сГоёдЕ нен с первым входом датчика статического момента, второй вход датчика статического момента соединен с дат чиком тока, выход датчика положени, соединен с ЁЯНИМ из .входов первого блока, сравнения, другой вход которого с блоком задания перемещения, а выход с входом датчика малых рассогласований регулятора положения и вторым блоком сравнения, другой вход которого связан с блоком умножения и деления, имеющем связь с датчиком статического момента через суммирующее устройство, кбторо0 производит суммирование сигнала с датчика статического момента и с задатчика полного момента. Задатчик полного момента связан с регулятором скорости, первый вход которого связан с первым ключом, проиаавод5пцим отключение задао чика скорости в зависимости от сигнала с второго блока рассогласования, второй вход связан с ключом, который отключае регулятор положения в зависимости от сигнала с датчика малых рассогласоваНИИ, третий вход связан с датчиком скорости, который также подает, сигнал на блрк умножения С 2 J . Такое устройство не позволяет обеопечить заданную точность при воздействии внешних возмущений в связи с воо можным возникновением колебательности контура положения, и как следствие этого, система не является оптимальной по качеству регулирования. Цель изобретения - повышение точнос ти устройства и качества регулирова№ия. Поставленная цель достигается тем, что в устройство для управления поз ционным электроприводом, содержащее последовательно соединенные регулятор скорости, регулйтор тока, усилитель, двигатель, кинематически связанный с датчиком скорости, датчиками положения грубого и точного канала, выходами под ключенными через устройство синхронизации к первому входу первого блока сравнения, второй вход которого подключен к выходу задатчика перемещения а выход - к третьему входу устройства син5фонизации, выходы датчика скорости и датчика тока двигателя подключены к вторым входам регуляторов соответствен но скорости и тока и к соответствующим входам блока вычисления тормозного пути, выход которого подключен к первому входу второго блока сравнения, выход которого соединен с вторым входом регулятора скорости, введены нелинейный элемент и ключ, управляющий вход которого подключен к выходу да-гчика скорости, информационный вход - к выуоау первого блока сравнения, первый выход - к второму входу второго блока сравнения, а второй выход - через нелинейный элемент к третьему входу регулятора скорости. На чертеж1в представлена блок-кзхема устройства. Устройство содержит датчик 1 полож ния грубого канала, датчик 2 положени точного канала, устройство 3 Синхрониз ции, блок 4 сравнения, задатчик 5 пере мещения, двигатель 6, усилитель 7, регулятор 8 тока, регулятор 9 скорости, нелинейный элемент Юс зоной нечувствительности, ключ 11, датчик 12 ско рости, датчик 13 тока, блок 14 сравнения, блок 15 умножения, сумматор 16, датчик 17 статйческо1Ч) момента, блок 19 деления, блок 20 вычисления ормозно1х пути. Пусть торможение до полной остановки электродвигателя при равнозамедлен- ном движении определяется выражением 4 Мп MC де Мр, , Mj. - соответственно полный и статистический моменты электродвигателя; К - коэффициент пропорциональности;п - линейная скорость электродвигателя. Нелинейный элемент Юс зоной нечувствительности вводится для устранения колебательного режима работы системы и формирования режима точной отработки заданного воздействия. Величина аоны нечувствительности рассчитьюается JB соответствии с заданной точностью отработки выходной величины. Элемент Ю .включается в работу после грубой отработки заданного воздействия в периодическом режиме работы системы, который исчезает, если сигнал рассогласования с ключа 11 попадает в зону нечувствительности. Отсутствие зоны нечувствительности в реальной системе регулирования приводит к неустойчивому равновесию. Устройство работает следующим образомПри подаче сигнала на требуемое перемешенне от задатчика 5 перемещения сигнал через блок 4 сравнения, ключ 11 и нелинейный элемент Ю попадает на регулятор 9 скорости и затем через регулятор 8 тока и усилитель 7 подается на двигатель 6, который начинает вращаться и через датчик 12 скорости переключает ключ 11. В дальнейшем раагон идет по каналу задатчика 5 перемещения, блок 4 сравнения, ключ 11, блок 14 сравнения, регулятор 9 скоро(ги, регулятор 8 тока, усилитель 7, двигатель 6. В системе имеется контур тока для формирования прямоугольной диаграммы и обратная связь по скорости для обеопечения устойчивсути. Путь торможения вычисляется в блоке 20 вычисления тормозного пути, состоящего из датчика полного момента, сумматора, блоков деления, умножения. Информация о текущем значении угла поступает от грубого и точного каналов, устройство синзфонизааии осуществляет переключеыве датчиков положения грубого и точ ного каналов в зависимости от величины рассогласования заданной и текущей коор динаты, сравнение которых осушествлен;ется в блоке 4 сравн шя. Величина рао согласования с блока 4 сравнения через ключ 11 попадает на блок 14 сравнения где сравнивается с величиной необходимого тормозного пути, после чего сиг нал подается на регулятор 9 скорости и при их совпадении начинается торможение. При полной остановке двигателя происходит переключение, вследствие чего сигнал рассогласования с блока 4 сравнения падает на нелинейный элемент 10, и двигатель начинает доворачвваться в заданную точку. Щн появлении сигнала на датчике 12 скорости происходит отключение нелинейного элемента 1О« и двигатель снова тормозится. Этот процесс толчков продолжается до тех nqp, пока двигатель не попадет в заданную точку с погрешностью, которая определяется зоной нечувствительности нелиней ного элемента.. Предлагаемое устройство улучшает качество регулирования системы в ст&тике и динамике, т.е. обеспечивает повь шение точности позиционирования механизма. Формула изобретения Устройство для управления позицио ным электроприводом, содержащее последовательно соединенные регулятор скорости, регулятор тока, усилитель, двигатель, кинематически связанный с дат. чиком скорости, датчиками пьложектгя грубого и точного канала, выходами подключеншдми через устройство син-. хронизации к первому входу пегжого блока сравнения, второй вход которого подключен к выходу задатчика перемещения, -а выход - к третьему входу устройства синхронизации, выхода датчика сксфости И датчика тока двигателя подключены к вторым входам регуляторов соответственно скорости и тока и к соответствующим входам блока вычисления тормозного пути, выход которого подклк) чен к первому входу второго блока срав нения, выход которого.соединен с вто 1НЛМ входом регулятора скорости, отличающееся тем, что, с целью повышения точности устройства, в него введены нелинейный элемент и ключ, управляющий вход которого подключен .к выходу датчика скорости, информационный вход - к выходу первого блога срев нения,, первый выход - к вторЬму входу второго блока сравнения, а второй выход - через нелинейный элемент - к третьему входу регулятора скорости. Источники информации, принятые во внимание при экспертизе 1.Попков С. Л. Следящие системы, Высшая школа, 1963, с. 32. 2.Авторское свидетельство СССР № 528542, кл. Q 05 В 11/О1, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод рабочего рольганга | 1983 |
|
SU1129709A1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1394386A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| Устройство для регулирования частоты вращения электропривода постоянного тока | 1977 |
|
SU731538A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |