ности, соединенного с одним из пхо- дов второго сумматора 8, другой вход которого подключен к выходу релейного блока 9, связанного с выходом первое сумматора 6.
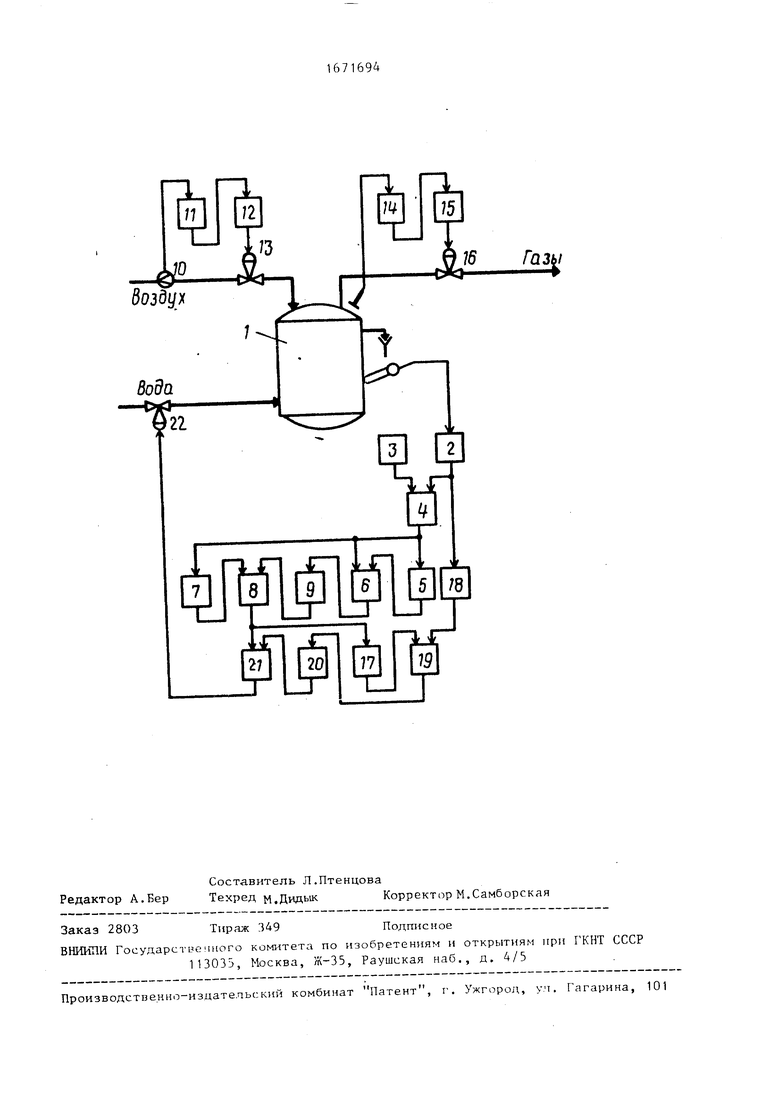
Контур стабилизации расхода воздуха на аэрацию содержит связанный с первичным преобразователем расхода 10 датчик 11, подключенный к входу регу- лятора 12, связанного с исполнительным механизмом 13, установленным на линии подачи аэрирующего воздуха.
Контур стабилизации давления в ферментаторе 1 содержит датчик 14, под- ключеннын к входу регулятора 15, связанного с исполнительным механизмом 16, установлонным на линии отходящих из ферментатора 1 газов.
Схема содержит блок 17 задержки, подключенный к выходу второго сумматора 8, корректируюгрш фильтр 18, подключенный к выходу датчика 2 температуры, выходы блока 17 задержки и корректирующего фильтра 18 подключены к входу третьего сумматора 19, выход которого подключен к входу интегратора 20, четвертый сумматор 21, один вход которого подключен к выходу интегратора 20, другой вход - к выходу второго сумматора 8, выход четвертого сумматора 21 соединен с исполнительным механизмом 22, установленным на линии подачи охлаждающей воды.
Система работает следующим образом.
Заданное значение температуры поступает с выхода блока 3 на вход блока 4 сравнения, на второй вход которого поступает сигнал с выхода датчи- ка 2 температуры. При действии возмущения на выходе блока 4 сравнения возникает рассогласование между заданным значением температуры и фактическим значением. Сигнал рассогласования поступает на вход дифференциатора 5, на вход первого сумматора 6 и н вход блока 7 с зоной нечувствительности.
Результирующий сигнал с выхода пер вого сумматора 6, составленный из суммы сигнала рассогласования и его производной, поступает на вход релейного блока 9, который с учетом знака поступившего на вход сигнала нормирует величину регулирующего воздействия поступающего на один из входов второго сумматора 8. Если величина рассогласования превышает величину
,
0- ю
р15671694
зоны нечувствительности нелинейного блока 7, то на другой вход второго сумматора 8 с выхода блока 7 поступает величина дополнительного воз- действия к регулирующему воздействию, формируемому релейным блоком 9, и суммарный сигнал с выхода второго сумматора 8 поступает на один из входов четвертого сумматора 21. Выходной сигнал датчика 2 тегшературы поступает также на вход корректирующего фильтра 18 с передаточной Функцией вида
( т . « 1 WT «j 1
(1)
w (p)-(TiD±lHTlEil) 1VP k-(T |P-H)()
5
0 5
4Q
0
5
где k - коэффициент усиления объекта по каналу расход охлаждающей воды - температура в ферментаторе;T,T - постоянные времени объекта
по этому же каналу; Т, ,1.2 - настроечные параметры;
р - оператор Лапласа. Передаточная функция объекта по каналу расход охлаждающей воды - температура, в (Ъерментаторе имеет вид
(2)
k е
WO(P)()()
где с - время запаздывания.
С учетом формул (1) и (2) выражение для выходного сигнала корректирующего Лильтра 18 в операторной форме можно записать следукнтим образом:
((р)(и,Р)-0У г-;тт,
(3)
- регулирующее воздействие ре- лейного блока 9 и нелинейного блока 7 с зоной нечувствительности .
где
и
Выбирая Т, «Т, и ,
можно
обеспечить на выходе корректирующего фильтра 18 значение сигнала (в частностиА
при
, )
F(t)U(t-Ј)+F(t-C), (4)
который содержит информацию о возмущении и регулирующем воздействии. Чтобы разделить эту информацию выходной сигнал корректирующего фильтра 18 поступает на вход третьего сумматора 3, на второй вход которого поступает инвертированный сигнал с выхода блока 17 задержки. В результате на выходе третьего сумматора 19 значение сигнала определяется выражением
16
F(t)F(t)-U(t-t)U(t-C)+F(t-Ј)- -UU-t)FU-C),(5)
если fl(t-c)U(t-Ј).
Таким образом, из выражения (5) следует, что при равенстве параметров передаточной функции корректирующего фильтра 18 и передаточной функции объекта по рассматриваемому каналу и при постоянстве запаздывания V выходной сигнал третьего сумматора 19 содержит информацию о внешнем неизмеряемом возмущении F. Поскольку величина возмущения по изменению выходного сигнала датчика 2 температуры с помощью корректирующего фильтра 18, имеющего передаточную функцию (1), определяется точно только О, Т{ Tj, 0 и постоянных параметрах объекта (2), что не выполняется в периодическом процессе ферментации, то с учетом динамических свойств объекта (Ферментатора) величина компенсирующего воздействия определяется с помощью сигналов U() и F(t), поступающих, с выхода третьего сумматора 19 на вход интегратора 20. Величина на выходе интегратора 20 определяется выражением Ј
(t)-U(t-Ј)dt, (6)
где Up - регулирующее воздействие,
компенсирующее влияние возмущения F на качество регулирования температуры; Т - настроечный коэффициент. Выходной сигнал интегратора 20 поступает на вход четвертого сумматора 21, на другой вход которого поступает регулирующее воздействие (J с выхода второго сумматора 8, определяющее динамику системы при возмущении .
Регулирующее воздействие
с выхода четвертого сумматора 21 поступает на вход исполнительного механизма 10, посредством которого обеспечивается компенсация влияния возмущения F на отклонение температуры в ферментаторе 1.
При снижении величины отклонения до величины зоны нечувствительности нелинейного блока 7 с зоной нечувствительности воздействие на выходе блока 7 отсутствует и процесс регули5
1694
рования температуры определяется
только регулирующим воздействием Ц% релейного блока 9, которое пройдя второй сумматор 8 и четвертый сумматор 21 поступает на вход исполнительного механизма 10. В результате работы интегратора 20 вырабатывается регулирующее воздействие, которое, прой- .Q дя четвертый сумматор 21, полностью
компенсирует возмущение F. В этом случае на выходе корректирующего фильтра 18 отслеживается только величина регулирующего воздействия (J , поступающая 5 на вход исполнительного механизма 10 с выхода второго сумматора 8. При этом на выходе третьего сумматора сигнал обнуляется, так как выходные сигналы блока 17 задержки U(t-c) и кор- 0 ректирующего фильтра 18 O(t-f) равны. При нулевом входном сигнале интегратора 20 прекращает интегрирование и на вход четвертого сумматора 21 поступает с выхода интегратора 20 сиг- 5 нал, компенсирующий влияние возмущения на процесс регулирования температуры. Вследствие этого при изменившемся возмущении нет необходимости делать перерасчет системы. При этом с 0 помощью релейного блока 9 реализуются регулирующие воздействия, обеспечивающие в установившемся режиме минимальные отклонения температуры от оптимальной при максимальных возмущаю- , щих воздействиях. Последние компенсируются регулирующим воздействием, формируемым с помощью корректирующего фильтра 18, третьего сумматора 19, блока задержки 17 и интегратора 20.
0
Формула изобретения
Система автоматического управления периодическим процессом фермента5 ции по авт. св. № 1413135, о т л и- чающаяся тем, что, с целью повышения точности, система содержит блок задержки и последовательно соединенные корректирующий Лильтр, тре0 тий сумматор, интегратор и четвертый сумматор, причем вход корректирующего фильтра соединен с выходом датчика температуры, второй вход третьего сумматора - с выходом блока задержки,
е входом соединенного с выходом второго сумматора, который соединен с исполнительным механизмом на линии подачи охлаждающей воды через четвертый сумматор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| Система для управления периодическим процессом ферментации | 1989 |
|
SU1725203A1 |
| Релейный регулятор | 1990 |
|
SU1836658A3 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
Изобретение относится к автоматическому управлению процессами ферментации и может быть использовано в микробиологической, медицинской, химико-фармацевтической и пищевой промышленности. Цель изобретения - повышение точности системы и увеличение выхода целевого продукта за счет повышения качества управления. Система содержит контур регулирования температуры в ферментаторе, блок задания оптимальной температуры, контур стабилизации расхода воздуха на аэрацию, контур стабилизации давления, включающий последовательно соединенные датчик, регулятор и исполнительный механизм, установленный на линии отходящих из ферментатора газов. Новым в системе автоматического управления является то, что она дополнительно снабжена блоком задержки и последовательно соединенными корректирующим фильтром, третьим сумматором, интегратором и четвертым сумматором, при этом вход корректирующего фильтра соединен с выходом датчика температуры, входы блока задержки и четвертого сумматора подключены к выходу второго сумматора, а выходы их соединены соответственно с вторым входом третьего сумматора и исполнительным механизмом на линии подачи охлаждающей воды. 1 ил.
| Система автоматического управления периодическим процессом ферментации | 1987 |
|
SU1413135A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
