Изобретен11е относится к области гибридной вычислительной техники и предназначено для автоматического решения эа,цач оптимального по быстродействию управления системами с распределенньпчи параметрами, при наличии ограничений на входные .ч выходные координаты.
Цель изобретения -- повьяиение точ-- ности моделирования.
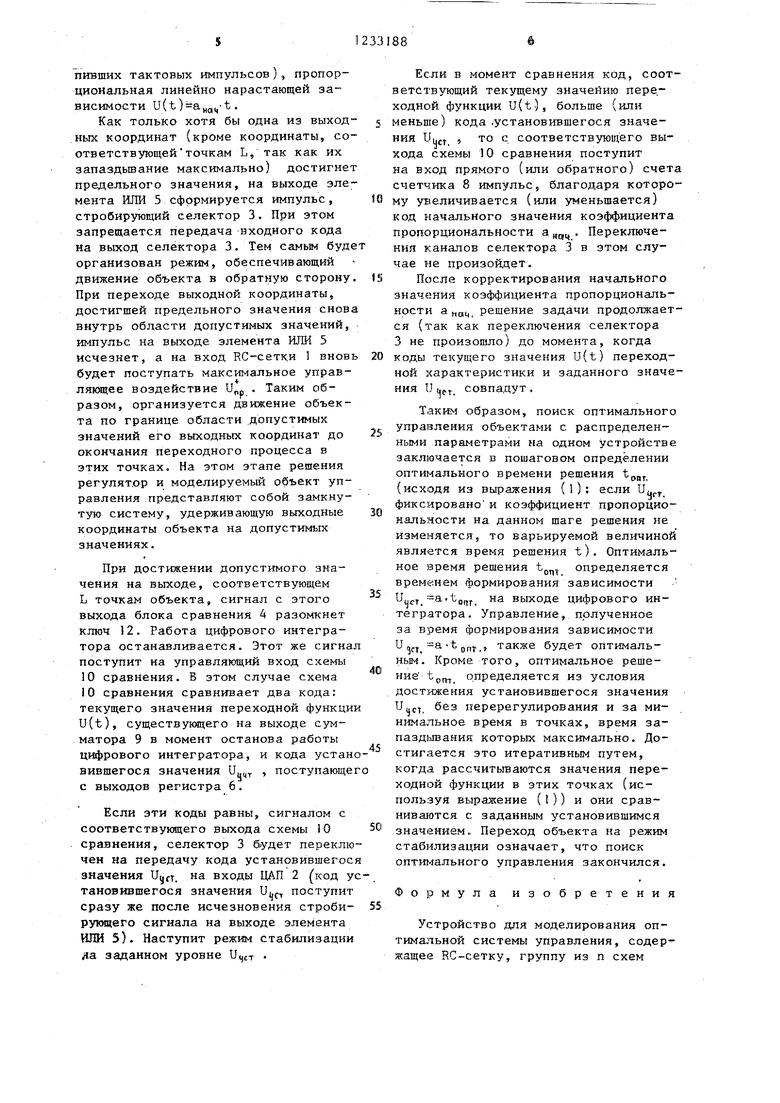
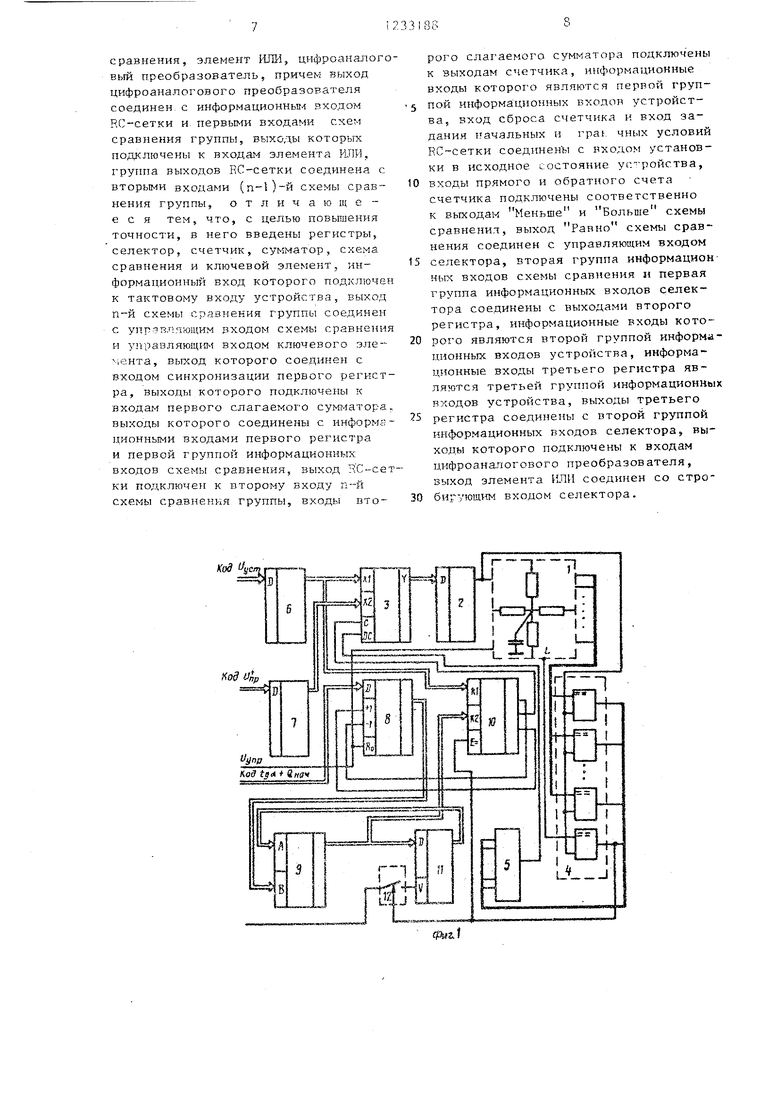
На фиг, 1 представлена блок-схема устройства для моделирования оптимальной системы управления; на фиг. 2-4 - временньге диаграммы.
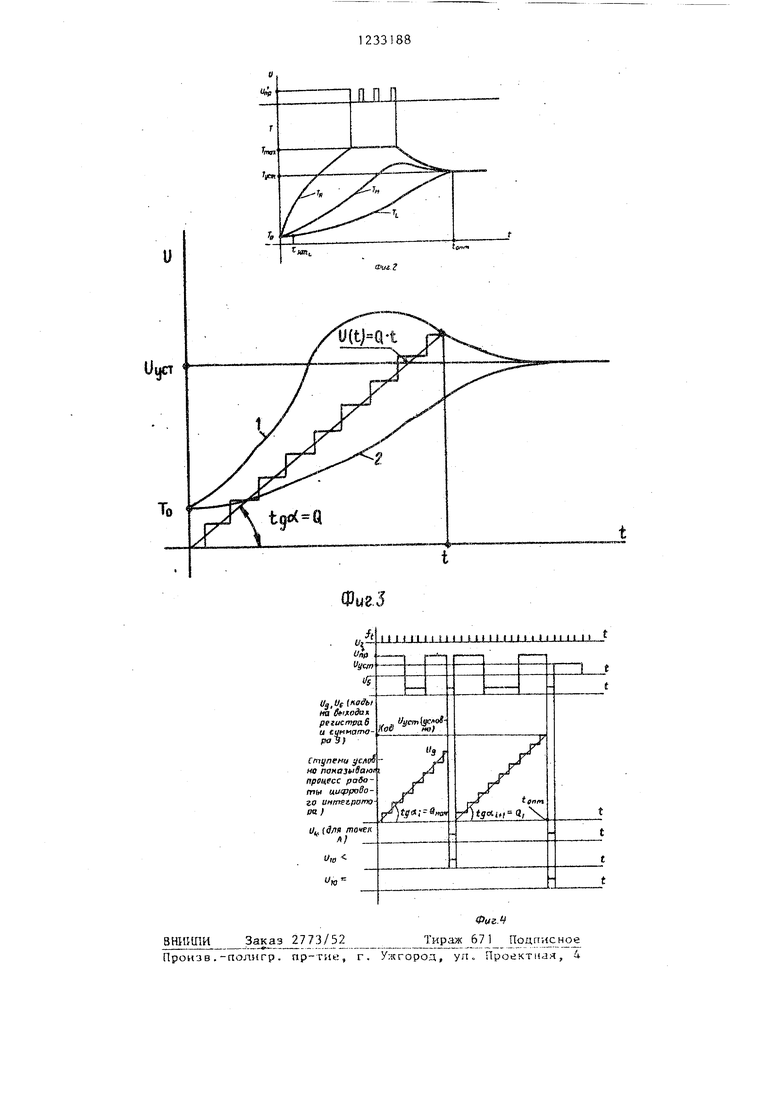
Принцип работы предлагаемого устройства рассмотрим иа примере оптимального управления нагревом тела, К данному телу в некоторых точках в виде управляюалего воздействия U подводится энергия управления. Подведенное к телу гепло распространяется по телу от точек с больЕ им тепловым потенциалом к точкам с меныиим тепловым потенциалом. Состояние точек N начнет изменяться сразу после подвода энергии управления, а других расположеиньж на некотором расстоянии йХ; от точек И, - через время запаздывания . Очевидно, что для некоторого множества точек: L запаздывание будет максимальяьп. Можно предположить, что при оптимальном управлении .ектом, переходная функция в L-точках РП-объекта имеет вид апериодического процесса, при этом во всех других точках объекта переходной процесс будет иметр. перерегулирование. Б противном случае апериодический процесс в L точках затягивался при недостаточной подаче тепла на вход РП-объекта, а при чрез мерной подаче тепла иа вход РП-объекта возникает перерегулирование в L точках.
Таким образом, определив время переходного процесса в точках Ь, которое соответствует управлению; при котором, с одной стороны, в -этих точках не будет перерегулирования,, а, с другой стороны, переходный процесс уже закончился, т.е. достигнуто установившееся значение., можно считать, что этому времени переходтгогс процесса соответствует оптималь ое управление.
Определить значел1ие перехс даой функции в точках L .южно по сошдую- щ,ей линейной зависимости .
где U(t,) - значение переходной характеристики ; t -- текущее время; а - коэффициент пропорциональности 5 лредставлякицу й собой тангенс угла иа-кло- на характеристики 1,1 (г )-a rpa(4)H4ecKva определение значения переходной функции, используя зависимость U(t)ait (например, если в точках L.. есть перере-гулирсвание ,, 11окаяг,|вает кривая 1 на фкг , 3.
1;;сли заф} ксировать значение U{t) на уровне установкнисгося значения i-,j,., , то о чевидно, что достит-нуть его при строго опреде.пекных значениях а и t,. Если времут оптк- г-;ально, то удовлетворить ус;(овию ll,,,,.a,t(2)
для точек 1. VB этом случае из выше™, сказанного следует, что будет получено опти;- аль :ое управление ; можно лишь определенном значении ко- эффтпдиента а .
Таким образом, изменяя коэффициеи пропорциональности при фикскроиаи- ном значении Пцст можно определить момент (т,е, оптимальное время р-еиения tofjy,), когда переходная характе- рист-ика 3 точках L не имеет nepepei y лирсваняя и перехо дный процесс уже закс1 чш1сп (кривая 2 на фиг. 3), УпрсВ.ясгпие, которое обеспечило такой пере;ходпый процесс, будет оптимальным. Для фop пipoвaния згшис мости
j(, может бьггь использован циф- ровси интегратор.
Устройстзо для моделирокану.я оп- ти альной системы управ. со;дер- кит НС--сетку i вместе с блоками зад,а цня {ача.льны-х и граничн()1х усло11 -1Й ис показанъ ),, цифроакалоговый г;ре- образователь (UAH) 2, селектор 3. г РУппу схем 4 сраяненкя, элемент ИЛИ 3, BTopoij регистр 6, третий ре- г лстр 7, счетчик 8, сумг-гатор 9, ;. 10 сравпения, п ервый регистр
., 2 ,
iJAR 2 вьп юлияет роль упрз-Бдяемого i-iCTочинка -тока и служит для задания -у правляю; ;его воздействия на вхоа- НС -сетк 1 ,
( элек ; ор 3 С.ПУЖИТ для Г7о;жлючс -5ия на информационные плодь) li.AIi 2 устаяоии шег ося з ачеииг: и,,,,, кял кода м;5ксима.Г ьно допустимого ivi pinуправляющего воздействия U
в зависимости от наличия сигнала на уп- равляюа1ем входе селектора 3. Селекто 3 также стробирует передачу кодов на вход ЦАП 2 в случае, если фop шpyeтc .сигнал на одном из,вых.одов блока 4 ограничителей.
Группа схем 4 сравнения совместно с элементом ИЛИ 5 предназначена для формирования стробирующего сигнала, поступающего на селектор 3, когда выходные сигналы КС-сетки достига- .ют предельных значений. Число схем сравнения группы равно числу выходов RC-сетки.
Регистр 6 служит для хранения кода установившегося знамения Т1 .
Регистр 7 служит для хранения кода максимального значения управляющего воздействия .
Счетчик 8 предназначен для вычисления значения коэффициента линейно- нарастающей функции U(t)a rt,
Сумматор 9 и регистр { образ пот цифровой интегратор, работающий по схеме с параллельным переносом. Данный интегратор совместно с ключом 12 служат для формирования линейно нарастающей функции U(t)att.
Схема 10 сравнения предназначена для сравнения кода текущего,эчачения величины переходной функции U(t) с кодом заданного значения установившегося значения Ua . Схема 10 сравнения вырабатывает сигнал управления, поступающий на селектор 3«
Предлагаемое устройство работает следующим образом.
Временные диаграммы на фиг, 4 даны для случая, когда текущее значе- ние U(t) переходной функции при первой итерации (т.е. U(t)a«,i4t) меньше значения Ijy-r ..Импульсом, поступаю-
щим с входа сброса устройства, счетчик 8 сбрасывается в нуль, а в RC-сетке 1 производится подключение блоков задания начальных и граничных условий. Начальные и граничные условия известны априорно из исходных данных задачи. После этого в ре-
гистры 6 и 7 заносятся соответственн значения кода установившегося значения UucTv и кода максимального управляющего воздействия Upp В счетчик 8 через входы предварительной уста- НОНКИ заносится код начального значения коэффициента пропорциональности а цдц .
5
б 15
20
25 зо88
Решение задачи начинается с момента подачи на вход ЦАП 2 кода максимального значения управляющего воздействия U Jj с выходов регистра 7 через селектор 3, Такое управление каналами селектора 3 обеспечивается соответствующим управляющим импульсом с выхода схемы 10 сравнения в данном случае нулевым уровнем сигнала с соответствующего выхода схемы 10 сравнения, так как; в начальный период решения код текущего значения переходной функции U{t) меньше кода заданного установившегося значения UMJ, ). В начальный момент решения ни одна из выходных координат RC-сетки I не достигнет предельного значения, поэтому на выходе элемента ИЛИ 5 отсутствует сигнал, стробирую- щий селектор 3. При этом объект, промоделированный RC-сеткой I, движется к конечному состоянию с макси- мальвой скоростью при предельном значении управляющего воздействия .
Одновременно с подачей на вход ЦДЛ 2 кода значения uj,. цифровой интегратор начинает формировать линейно нарастающую функцию U(t )aj,. Происходит это следующим образом, Код начального значения коэффициента пропорциональности ацц, с выходов счетчика 8 поступает на информационные входы второго слагаемого сумматора 9. Первым тактовым импульсом
тактовые импульсы поступают с тактового входа устройства с частотой f через ключ 12 на вход управления регистра 11) код а будет занесен в регистр II и установится на его выходах. Так как выходы регистра 11 связаны с входами первого слагаемого сумматора 9, то код а„д поступит также и на входы первого слагаемого cy {мaтopa 9. При следующем цикле работы цифрового интегратора (т,е. при процессе суммирования кодов на входах сумматора 9) на выходах суммы сумматора 9 установится код, равный
величине 2-а
нач.
Следующим тактовым
импульсом он будет занесен в регистр 11, и появится на его выходах и входах слагаемого сумматора 9. Таким образом, при поступлении тактовых импульсов на управляющий вход регистра 11, на выходах суммы сумматора 9 будет формироваться линейно нарастающая функция . (где N - текущее значение кода, п - число поступивших тактовых импульсов), пропорциональная линейно нарастающей зависимости U(t )a„aцt.
Как только хотя бы одна из выход- ных координат (кроме координаты, соответствующей точкам L, так как их запаздьшание максимально) достигнет предельного значения, на выходе элемента ИЛИ 5 сформируется импульс, стробирующий селектор 3. При этом запрещается передача входного кода на выход селектора 3. Тем самьв буде организован режим, обеспечивающий движение объекта в обратную сторону. При переходе выходной координаты, достигшей предельного значения снова внутрь области допустимых значений, импульс на выходе элемента ИЛИ 5 исчезнет, а на вход RC-сетки 1 вновь будет поступать максимальное управ- лякяцее воздействие . Таким образом, организуется движение объекта по границе области допустимых значений его выходных координат до окончания переходного процесса в этих точках. На этом этапе решения регулятор и моделируемый объект управления .представляют собой замкнутую систему, удерживающую выходные координаты объекта на допустимых значениях.
При достижении допустимого значения на выходе, соответствующем L точкам объекта, сигнал с этого выхода блока сравнения 4 разомкнет ключ 12. Работа цифрового интегратора останавливается. Этот же сигнал поступит на управляющий вход схемы 0 сравнения. Б этом случае схема 10 сравнения сравнивает два кода: текущего значения переходной функции U(t), существукяцего на выходе сумматора 9 в момент останова работы цифрового интегратора, и кода установившегося значения U , поступающег с выходов регистра 6.
Если эти коды равны, сигналом с соответствукяцего выхода схемы 10 сравнения, селектор 3 будет переключен на передачу кода устанрвив1яегося значения Uyj. на входы ЦАП 2 (код установившегося значения Ubf поступит сразу же после исчезновения строби- рующего сигнала на выходе элемента HJffi 5). Наступит режим стабилизации да заданном уровне UI,CT
я 0 S 0 5 0
5
5
0 5
Если в момент сравнения код, соответствующий текущему значейию переходной функции U(t), больше (или меньше) кода .установившегося значения UhjT 5 то с соответствующего выхода схемы 10 сравнения поступит на вход прямого (или обратного) счета счетчика 8 импульс, благодаря которому увеличивается (или уменьшается) код начального значения коэффициента пропорциональности а . Переключения каналов селектора 3 в этом случае не произойдет.
После корректирования начального значения коэффициента пропорциональности а „„ц решение задачи продолжается (так как переключения селектора 3 не произошло) до момента, когда коды текущего значения U(t) переходной характеристики и заданного значения и (,(.,. совпадут,
Таким образом, поиск оптимального управления объектами с распределенными параметрами на одном устройстве заключается в пошаговом определении оптш 1ального времени решения t (исходя из выражения (l): если U. фиксировано и коэффициент пропорциональности на данном шаге решения не изменяется, то варьируемой величиной является время решения t). Оптимальное время решения определяется временем формирования зависимости -- (jcT., выходе цифрового интегратора. Управление,, полученное за время формирования зависимости и (. -a-tgn f, также будет оптимальным. Кроме того, оптимальное решение Ь определяется из условия достижения установившегося значения U|j5 без перерегулирования и за минимальное время в точках, время запаздывания которых максимально. Достигается это итеративным путем, когда рассчитываются значения переходной функции в этих точках (используя выражение (1)) и они сравниваются с заданным установившимся значением. Переход объекта на режим стабилизации означает, что поиск оптимального управления закончился.
Формула изобретения
Устройство для моделирования оптимальной системы управления, содержащее НС-сетку, группу из п схем
сравнения, элемент HJlI-i, цифроаналого- вый преобразователь, причем выход цифроаналогового преобразователя соединен, с информационньв-1 входом RC-сетки и первыми входами схем сравнения группы, выходы которых подключены к входам элемента ЮТИ, группа выходов ВС-сетки соединена с вторыми входами ( схемы сравнения группы, отличаю щ е - е с я тем, что, с целью повышения точности, в него введены регистры, селектор, счетчик, сумматор, схема сравнения и ключевой элемент, ин- формадионный вход которого подключен к тактовому входу устройства, выход п-й схемы сравнения группы соединен с упрgB.f яющим зходом схемы сравнення и управляющга 1 входом ключевого эле- чента, выход которого соединен с входом синхронизации первого регистра, выходы которого подключены к входам первого слагаемого сум1- атора. выходы которого соединены с информа- дионными входами первого регистра и первой группой информационных входов схемы сравнения, выход НС-сет- ки подключен к второму входу п--й схемы сравнения группы, входы вто
0
рого слагаемого сумматора подключены к выходам счетчика, информационные входы которого являются первой группой информа:ционных входов устройства, вход сброса счетчикл и вход задания тгачальных и грак чных условий Р,С сетки соединен с входом установки в исходное состояние устройства, входы прямого и обратного счета счетчика подключены соответственно к выходам Меньше и Больше схемы сравнения, выход Равно схемы сравнения соединен с управляющим входом
селектора, вторая группа информационных входов схемы сравнения и первая группа информационных входов селектора соединены с выходами второго регистра, информационные входы которого являются второй группой информационных входов устройства, информационные входы третьего регистра являются третьей группой информационных входов устройства, выходы третьего
регистра соединены с второй группой информационных входов селектора, выходы которого подключены к входам цифроанапогового преобразователя, выход элемента ИЛИ соединен со стробигующ1-1м входом селектора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1270779A1 |
| Устройство для решения нелинейных уравнений теплопроводности | 1987 |
|
SU1453421A1 |
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1288729A1 |
| Устройство следящего аналого-цифрового преобразования | 1988 |
|
SU1617639A1 |
| Устройство для измерения параметров газовых сред | 1980 |
|
SU894527A1 |
| Субоптимальный нелинейный фильтр | 1990 |
|
SU1714618A1 |
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1249549A1 |
| Устройство для контроля аналоговых объектов | 1989 |
|
SU1718189A1 |
| Цифровой фазометр-частотомер | 1985 |
|
SU1265644A1 |
Изобретение относится к области гибридной вычислительной техники. Цель изобретения - повышение точности. Указанная цель достигается введением в устройство трех регистров, селектора, счетчика, сумматора, схемы сравнения, ключа. Устройство может быть иЬпользовано при построении оптимальных систем управления объектами с распределенными параметрами. Поиск оптимального управления объектами с распределенными параметрами на одном устройстве заключается в пошаговом определении оптимального времени решения. 4 ил. с S сл с tsD GO СО ОО 00
Ход
Код
ЯВ
5
Фиг 5
Unft . Jew
Ct
II 1 1 III t I I I 1 i П
ttj,(/f ( на б 1лодаи pfiucmpaS и еаимаггю- раЗ
CmynfM 4 но noHajtiSaHi npeufcc работы иисррово- го UHirtetpamo- oal
Uif (Зля тачек л/
Уро
y.;cm( кое на)
f(Sj wwa«f
tfnn
)(5оц,(°д, X
вниши
Заказ 2773/52
Произв.-полигр. , г, Уиггород, уп. Проектная, 4
Фиг. Тираж 671 Подписное
| Устройство для моделирования замкнутых распределенных систем управления | 1977 |
|
SU693399A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования оптимальной системы управления | 1980 |
|
SU928378A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
