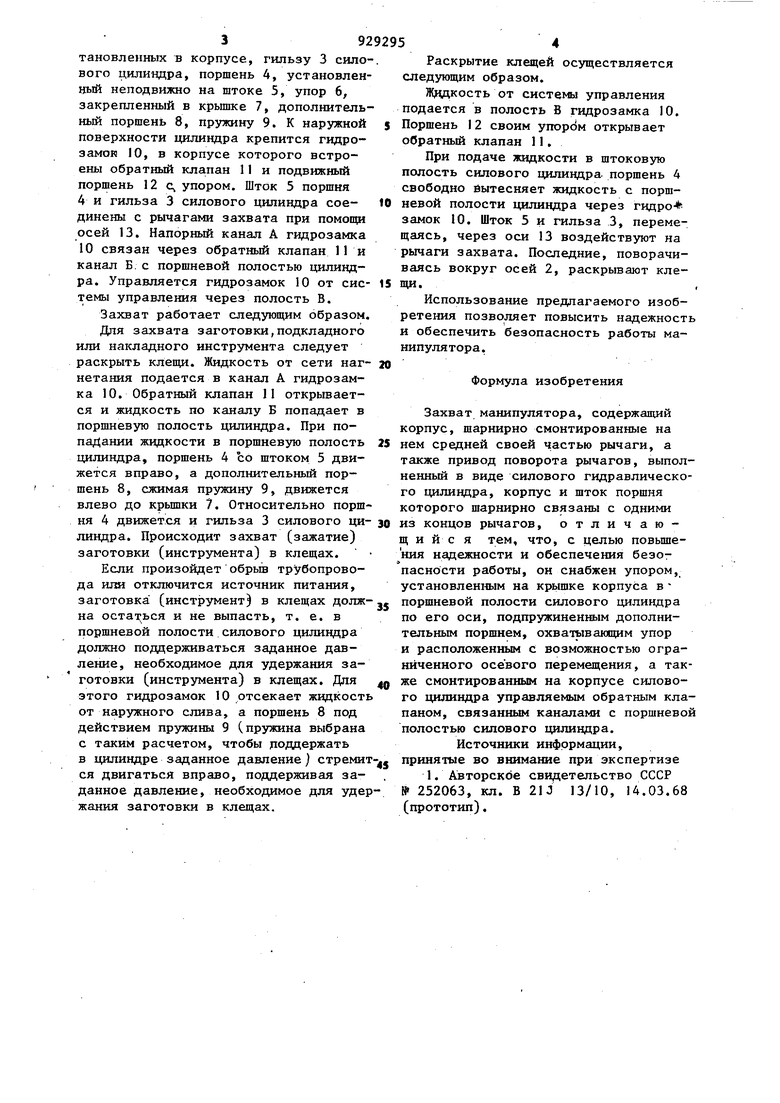
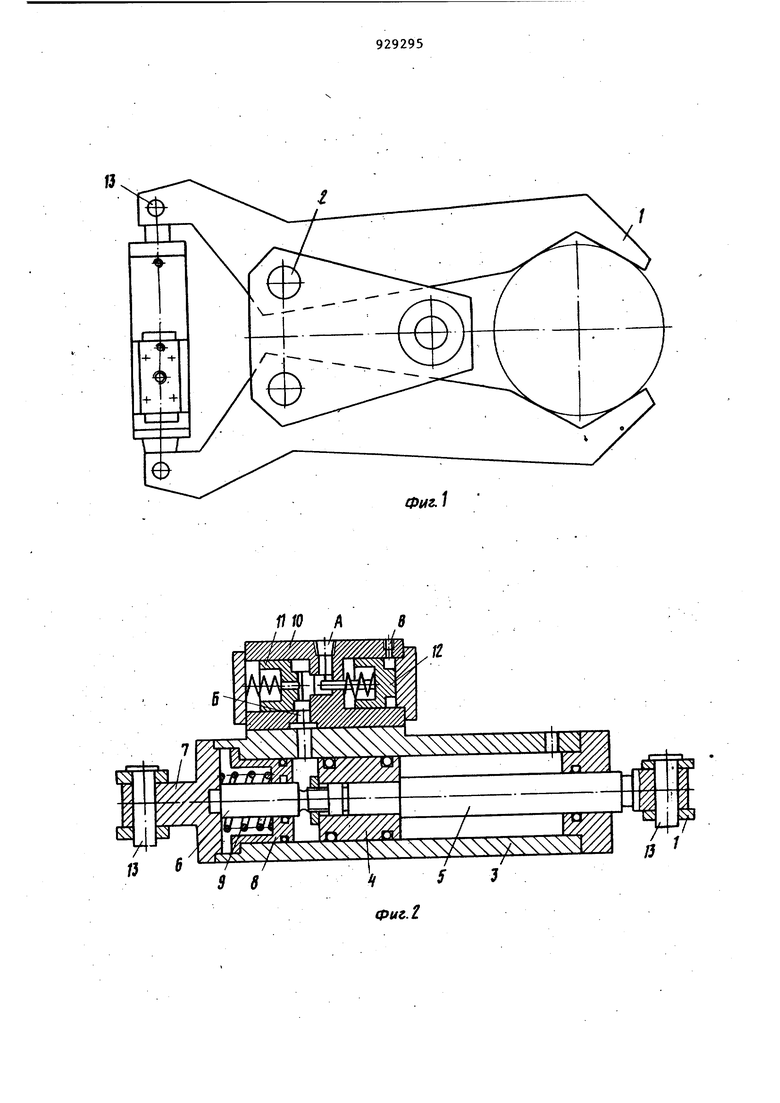
Изобретение относится к вспомогательному оборудованию кузнечно-штамповочного производства машиностроительных предприятий, а именно к конс рукциям захватов манипуляторов. Известен захват манипулятора, содержащий корпус, шарнирио смонтированные на нем средней своей частью рычаги, а также привод поворота рыча гов, выполненный в виде силового гид равлического цилиндра, корпус и шток поршня которого шарнирно связаны с о одними из концов рычагов Г1. Однако известный захват манипулятора не позволяет удерживать заготов ку при, обрыве трубопровода или вне- (запном отключении энергии, что снижает надежность и безопасность работ манипулятора. Цель изобретения - повьш1ение надежности -и обеспечение, безопасности работы манипулятора. Цель достигается тем; что захват манипулятора, содержащий корпус, шар нирно смонтированные на нем средней своей частью рычаги, а также привод поворота рычагов, выполненный в ввде силового гидравлического цилицдра, корпус и шток поршня которого шарнирно связаны с одними из концов рычагов, снабженупором, установленным на крышке корпуса, в поршневой полости силового цилиндра по его оси, подпружиненным дополнительным поршнем, охватывакяцим упор и расположенным с возможностью ограниченного осевого перемещения, а также смонтированным на корпусе силового цилиндра управляем.1м обратным клапаном, связанным каналами с поршневой полостью силового цилиндра. На фиг. 1 изображен захват манипулятора, общий вид; на фиг. 2 - силовой цилиндр поворота рычагов при их раскрытом положении; на фиг. 3 - то же, при закрытом положении рычагов. Захват манипулятора содержит рычаги 1, смонтированные на осях 2, установленных в корпусе, гильзу 3 силового цилиндра, поршень 4, установленный неподвижно на штоке 5, упор 6, закрепленный в крьппке 7, дополнительный поршень 8, пружину 9. К наружной поверхности цилиндра крепится гидроэамок 10, в корпусе которого встроены обратный кпа.пан 11 и подвижный поршень 12 с упором. Шток 5 поршня 4 и гильза 3 силового цилиндра соединены с рычагами захвата при помощи осей 13. Напорный канал А гидрозамка 10 связан через обратный клапан 11 и канал Б. с поршневой полостью цилиндра. Управляется гидрозамок 10 от сиетемы управления через полость В.
Захват работает следующим образом.
Дпя захвата заготовки,подкладного или накладного инструмента следует раскрыть клещи. Жидкость от сети нагнетания подается в канал А гидрозамка 10. Обратный клапан II открывается и жидкость по каналу Б попадает в поршневую полость цилиндра. При попадании жидкости в поршневую полость цилиндра, поршень 4 со штоком 5 движется вправо, а дополнительный поршень 8, сжимая пружину 9, движется влево до крьш1ки . Относительно поршня 4 движется и гильза 3 силового цилиндра. Происходит захват (зажатие) заготовки (инструмента) в клещах.
Если произойдет обрыв трубопровода или отключится источник питания, заготовка (инструмент) в клещах должна остат ься и не выпасть, т. е. в поршневой полости силового цилиндра должно поддерживаться заданное давление, необходимое для удержания заготовки (инструмента) в клещах. Для этого гидрозамок 10 отсекает жидкость от наружного слива, а поршень 8 под действием пружины 9 (пружина выбрана с таким расчетом, чтобы поддержать в цилиндре заданное давление) стремит ся двигаться вправо, поддерживая заданное давление, необходимое для удержания заготовки в клещах.
Раскрытие клещеЙ осуществляется следующим образом.
Жидкость от системы управления подается в полость В гидрозамка 10. Поршень 12 своим упором открывает обратный клапан 11.
При подаче жидкости в штоковую полость силового цилиндра поршень 4 свободно йытесняет жидкость с поршневой полости цилиндра через гидро замок 10. Шток 5 и гильза 3, перемещаясь, через оси 13 воздействуют на рычаги захвата. Последние, поворачиваясь вокруг осей 2, раскрывают клеЩИ.
Использование предлагаемого изобретения позволяет повысить надежност и обеспечить безопасность работы манипулятора.
Формула изобретения
Захват манипулятора, содержащий корпус, шарнирно смонтированные на нем средней своей частью рычаги, а также привод поворота рычагов, выполненный в виде силового гидравлического цилиндра, корпус и шток поршня которого шарнирио связаны с одними из концов рычагов, отличающий с я тем, что, с целью повьш1ения надежности и обеспечения безопасности работы, он снабжен упором, установленным на крышке корпуса в поршневой полости силового цилиндра по его оси, подпружиненным дополнительным поршнем, охватъшающим упор и расположенным с возможностью ограниченного осевого перемещения, а также смонтированным на корпусе силового цилиндра управляемым обратным клапаном, связанным каналами с поршнево полостью силового цилиндра.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 252063, кл. В 21J 13/10, 14.03.68 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПУЛЬСАЦИОННЫЙ ПРЕСС | 1991 |
|
RU2010658C1 |
| Устройство для шаговой подачи обраба-ТыВАЕМОй зАгОТОВКи | 1977 |
|
SU729905A1 |
| Гидропривод манипулятора | 1981 |
|
SU1049687A1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Устройство управления базой очистного агрегата в профиле пласта | 1986 |
|
SU1425344A1 |
| Устройство для проходки тоннелей | 1987 |
|
SU1510450A1 |
| Манипулятор для установки элементов крепи | 1978 |
|
SU877046A1 |
| Зажимное устройство машины для сварки трением | 1985 |
|
SU1303334A1 |
| Гидравлическое следящее устройство для управления грузоподъемным краном | 1969 |
|
SU438603A1 |
| Гидроцилиндр с фиксирующим клапаном | 2021 |
|
RU2781734C1 |

НЮ /
44 4 XAX4V OC xS:
т
1
Фиг. 2
