(54) МОДУЛЬ / 1АНИПУЛЯТОРА

| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора Тенгиза | 1980 |
|
SU933451A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК НАПРЯЖЕННОСТИ ЭЛЕКТРИЧЕСКОГО ПОЛЯ | 2019 |
|
RU2724099C1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1194671A1 |
| ОСЦИЛЛЯТОР БУРИЛЬНОЙ КОЛОННЫ | 2021 |
|
RU2768784C1 |
| Манипулятор | 1987 |
|
SU1648759A1 |
| ВИБРОДВИГАТЕЛЬ | 1995 |
|
RU2113050C1 |
| АППАРАТ ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ЛЕЧЕНИЯ | 1993 |
|
RU2078591C1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1189674A1 |
| Способ перемещения подвижного звена и устройство для его осуществления | 1990 |
|
SU1815206A1 |
| ОСЦИЛЛЯТОР БУРИЛЬНОЙ КОЛОННЫ | 2023 |
|
RU2820910C1 |
1
Изобретение относится к машиностроению, а конкретно к манипуляторам и промышленным роботам, и предназначено для обслуживания процессов перемещения и ма.нипулирования в пространстве предметами, заготовками, инструментами и т. д.
Известен модуль манипулятора, содержащий входное и выходное звенья, а также приводной элемент, выполненный в виде ленты из термочувствиетльного материала. При подключении питания приводной элемент обеспечивает линейное и вращательное от носительное перемещение входного и выходного звеньев 1.
Недостатками данного устройства являются относительная сложность конструкции, а также то, что отсутствует возможность получения вращательного относительного перемещения входного и выходного звеньев без линейного перемещения.
Известен приводной элемент, выполненный в виде биметаллической спирали, причем источником питания служит нагреватель 21.
Недостатком данного устройства является относительно большие габариты, что затрудняет его использование в модулях манипуляторов.
Известен также модуль манипулятора, содержащий приводной элемент, выполненный в виде связанной с источником питания 5 двухслойной пластины, выполненной из жестко связанных между слоев материалов с неодинаковым коэффициентом линейного расщирения. При подключении питания приводной элемент обеспечивает взаимное перемещещение входного и выходного звеньев 3.
Недостатком этого модуля является низкая точность относительного поворота звеньев, а также то, что при выполнении двухслойной пластины, например в виде спира15 ли, габариты модуля увеличиваются.
Цель изобретения - устранение указанных недостатков.
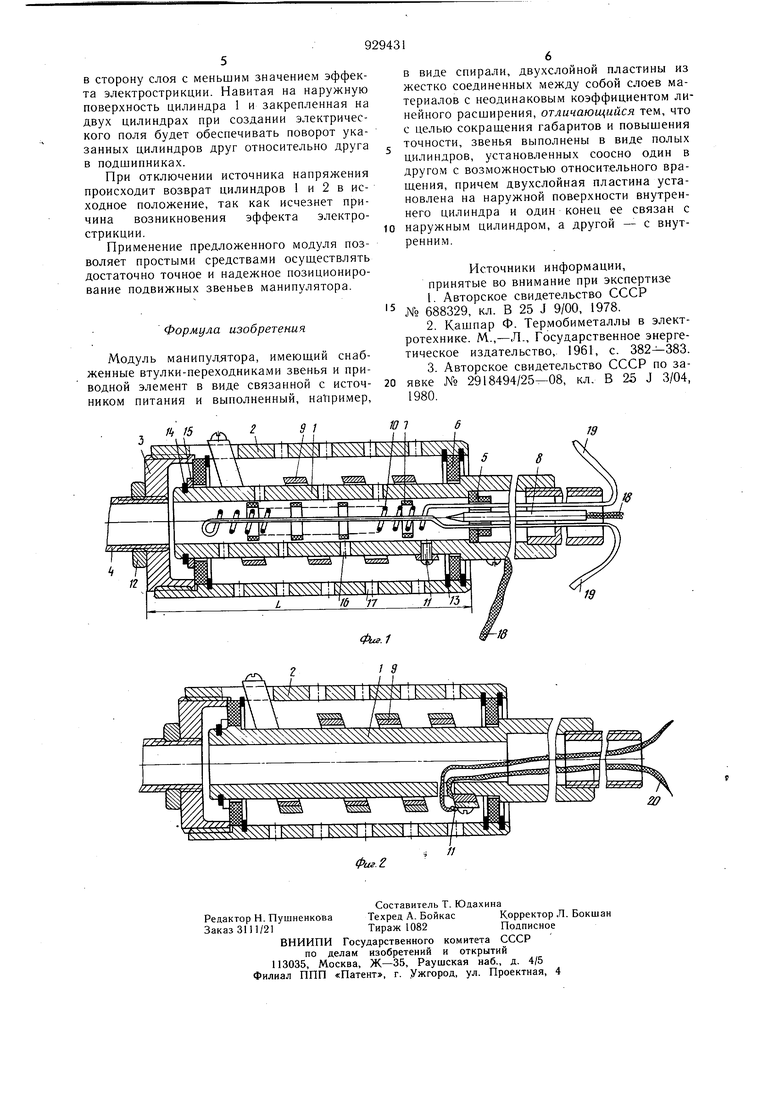
Цель достигается за счет того, что звенья выполнены в виде полых цилиндров, установленных соосно один в другом с возможностью вращения, причем двухслойная пластина установлена на наружной поверхности внутреннего цилиндра, при этом один конец пластины жестко связан с наружным цилиндром, а другой конец - с внутренним. На фиг. I изображен модуль манипулятора, в котором слои пластины выполнены из термочувствительного материала; на фиг. 2 - то же, с пластиной из электрострикционных материалов. Слои двухслойной пластины могут быть выполнены из термочувствительных материалов, а источник питания выполнен в виде наг|)евателя, который может быть установле1 в полости внутреннего цилиндра. С целью интенсификации процесса охлаждения на поверхностях цилиндров могут быть выполнены сквозные отверстия. Помимо этого слои пластины могут быть выполнены из электрострикционных материалов, при этом поверхности пластипы покрыты токопроводящей пленкой, а цилиндры выполнены из электроизолируюцлего материала. Полые механические цилиндры 1 и 2 соосно расположены один в другом. С.одной CTopoHh, в отверстие цилиндра 2 ввинчена опорная заглушка 3, в отверстие кбторой установлена полая муфта-переходник 4. Другая муфта-переходник установлена с другого Koinia в цилиндре 1. Во внутренней полости цилиндра 1 установлена заглушка 5 с отверстиями: центральным и двумя по периметру (периферийные). Цилиндры 1 и 2 установлены с возможностью вращения в подшипниках скольжения 6. Во внутреннюю нолость цилиндра 1 вдоль ее длины установлены шайбы 7 из термостойкого и электроизолирующего материала с отверстиями. В заглушку 5, в ее центральное отверстие вставлен стержневой электрод 8. Внутренние стенки цилиндра 1 и электрод 8 образуют конденсатор, выступая в роли его обкладок. На наружную поверхность цилиндра 1 установлена спиральная термобиметаллическая пластина 9. Во внутренней полости цилиндра 1, опираясь на шайбы 7, расположен термоиндуктор 10, выполненный в виде спирали (фиг. 1). Один конец пластины 9 крепитя на наружной поверхпости Цилиндра 1 посердством винта II. Другой конец, пластины крепится на наружной поверхности цилиндра 2. Втулка-переходник 4 фиксируется посредством контргайки 12. Подщипник 6 фиксируется шайбами 13, а другой подшипник фиксируется в цилиндрах 1 и 2 посредством стопорного кольца 14 и шайбы 15. В теле цилиндров по периметру имеются отверстия 16 и 17 для свободного перемещения газообразной среды, находящейся в полостях цилиндров 1 и 2. Посредством электропроводов 18 и 19 (фиг. 1) подводится питание соответственно к обкладкам конденсатора (стержНевый электрод 8 - поверхность цилиндра 1) и к пластине 9. Полые втулки-переходники 4 служат для соединения сустава к другим частям манипулятора. Подшипники 6 и шайбы 7 выполнены из термостойкого и электроизолирующего материала с .малым коэффициентом трения. На фиг. 2 представлено выполнение модуля, когда пластина 9 выполнена из Cvioes одного и того же диэлектрика с наибольшей разницей значений эффекта электрострикции .ежду наружным и внутренним слоями (при нахождении пластины в электрическом поле 7). Пластина 9 снаружи покрыта тонкой токопроводящей пленкой. Пленка отсутствует лишь на торцевых и боковых поверхностях пластины 9. Источник создания электрического поля для пластины 9 подводится посредством провода 20. Все элементы модуля (фиг. 2) выполнены из электроизолирующего материала. Устройство работает следующим образом. При подключении источника питания или источника создания электрического поля (фиг. 2) слои двухслойной пластины 9 удлиняются, причем наружный слой удлиняется больше, чем внутренний, за счет чего происходит изгиб пластины в сторону внутреннего слоя. За счет того, что двухслойная пластина 9 навита на внутренний цилиндр 1, а концы ее жестко связаны соответственно один с наружным полым цилиндром 2, а второй - с внутренним 1, будет происходить взаимный .поворот цилиндров 1 и 2 в подшипниках. При отключении источника питания, происходит возврат цилиндров I. и 2 в исходное положение. Нагрев термобиметаллической пластины 9 (фиг. I) производится косвенно посредством термоидуктора 10, к которому подво-. дится электропитание в виде токов высокой частоты. Навитая на-наружную поверхность цилиндра 1 и закрепленная на двух цилиндрах 1 и 2 пластина 9 под действием тепла будет обеспечивать поворот указанных цилиндров друг относительно-друга в подщипниРазгибание пластины 9 вызывается ее принудительным охлаждением. Для этого отключают термоиндуктор 10 и вKv ючaют цепь конденсатора, для чего подводят высокое напряжение к его обкладкам (стержневый электрод 8 - поверхность цилиндра 1). Происходит движение среды, вызываемое ионизацией среды, находящейся между обкладками конденсатора. Посредством движения среды происходит отбор тепла от массы всего устройства. Тепло уносится через отверстия 16 и 17 в цилиндрах. В случае, представленном на фиг. 2, внешний слой пластины 9 с больш:им значением эффекта электрострикции при создании электрического поля будет увеличивать удлинение внутреннего слоя, а внутренний слой с меньшим значением эффекта электрострикции будет уменьщать удлинение внещнего слоя. В результате пластина 9 изогнется
