Изобретение относится к машиностроению, в частности к манипуляторам, предназначенным для различного .рода процессов манипулирования объектами в пространстве.
Цель изобретения - улучшение устройства путем расширения пределов позиционирования приданием возможности движения вращения относительно продолвдой- оси при сохранении возвратно-прступательного перемеще1тя вдоль этой же оси, т.,е. расширение технологических возможностей. Последовательность: платформа - разверзае мый кольцевой геликоид (геликоиды), схваТ; проводами присоединен энергетич ес и к блоку питания, а сигнально к блоку управления. Это соединение представляет систему обратной связи.
На чертеже представлено предложенное устройство с использованием одного активного элемента.
Устройство содержит основание 1, гибкое звено 2, захватное устройство 3, проводы 4 электропитания и сигналов, отверстия 5 крепления основания.
К основанию 1 из электроизоляционного материала (например пластмассы) присоединено гибкое звено 2 - упругая слоистая пластина в виде кольцевого косого геликоида правого вращения. В пластине 2 слои изготовлены из упругих материалов (например, металлов,, металлополимёров). Слои прочно соединены между собой и подобраны так, что имеет место разность в коэффициентах линейного расширения. Слои обладают свойством линейного расширения либо при нагреве и охлаждении (например термобиметалл) , либо магнитострикцни, либо
электрострикции. Захватное устройст во 3 и гибкое звено 2 подключены к блоку питания и блоку 4 управления электропроводами. Манипулятор присоединен к месту крепления (пол, стена, потолок и т.п.) винтами посредством отверстий 5 в основании 1.
Работа устройства заключается в перемещении захватного устройства 3 относительно основания 1 на основе преобразования гибким звеном 2 электроэнергии в механическую энергию.
При нагреве-охлаждении (либо магнитострикции, либо электрострикции) из-за наличия разности в коэффициентах линейного расширения между слоями пластины в кольцах геликоида возникает изгиб. Если инертный слой пластины является внутренним, имеет место уменьшение диаметра каждого кольца геликоида с одновременным сближением колец активного элемента. Если инертный слой расположен наружным слоем пластины, имеет место увеличение диаметра каждого кольца геликоида с одновременным взаимо,удалением колец активного элемента. 1При этом в зависимости от направления колец геликоида (правостороннее, либо левостороннее, по часовой или против часовой стрелки) концы активного элемента проворачиваются друг относительно друга. В конечном итоге суммарньй изгиб всех колец геликоида приводит к одновременному двойному движению активного элемента: перемещению вдоль продольной оси устройства и вращению вокруг нее.
Предложенное техническое решение обладает более широкими технологическими возможностями. I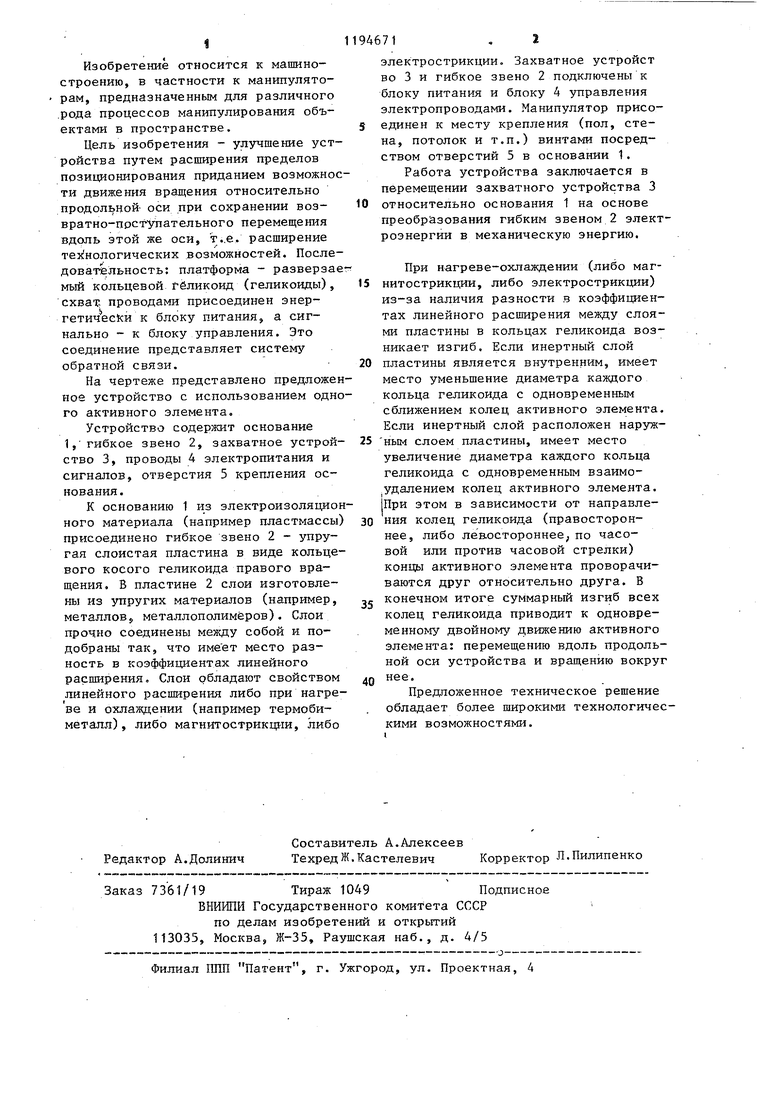
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1648759A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1194669A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1189674A1 |
| Манипулятор Тенгиза | 1983 |
|
SU1212780A1 |
| Модуль манипулятора Тенгиза | 1980 |
|
SU933451A1 |
| Модуль манипулятора | 1984 |
|
SU1217662A1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Модуль манипулятора | 1980 |
|
SU929431A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Манипулятор | 1986 |
|
SU1337254A1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий основание, на котором закреплено гибкое звено с захватным устройством, отличающийся тем, что, с целью расширения технологических возможностей, гибкое звено выполнено в виде пластины, состоящей из двух слоев с разными коэффициентами линейного расширения, изготовленной в виде кольцевого косого геликоида. (Л со li О) 
| Способ плоского шлифования | 1978 |
|
SU948625A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
