няющая работу манипулятора (фиг.6) с односторонне симметричной выгнутостью отдельных пластин; на фиг.10 - то же, с односторонне несимметричной выгнутостью отдельных пластин.
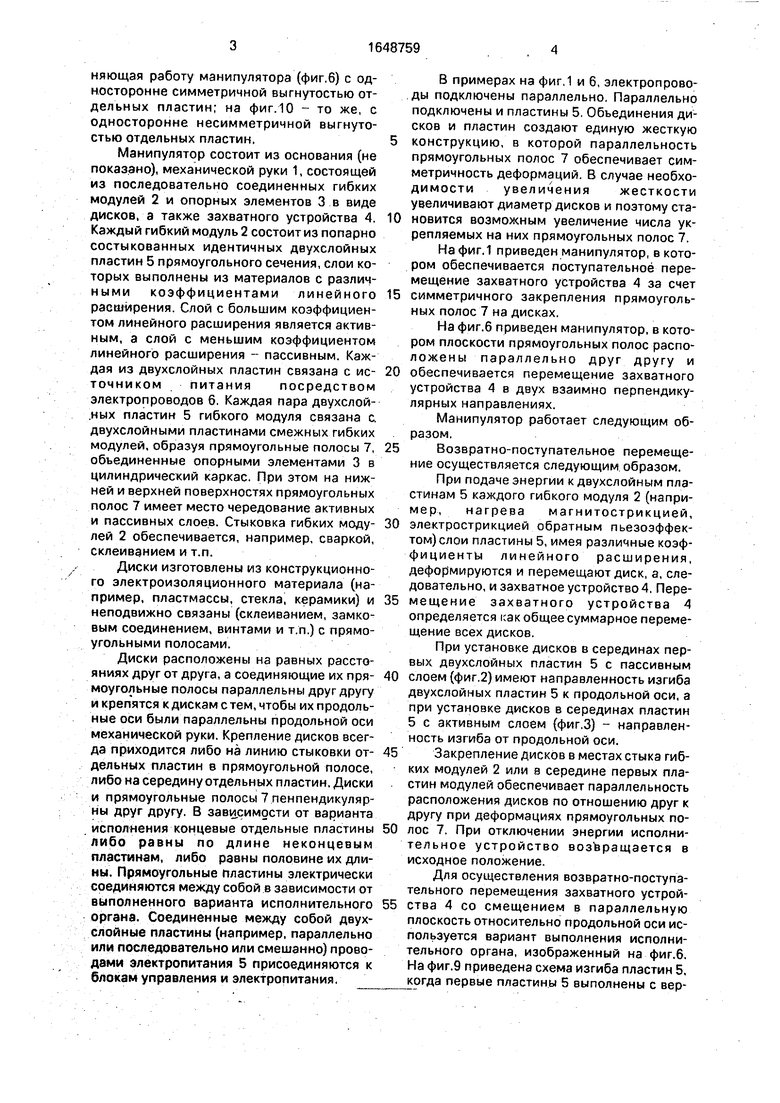
Манипулятор состоит из основания (не показано), механической руки 1, состоящей из последовательно соединенных гибких модулей 2 и опорных элементов 3 в виде дисков, а также захватного устройства 4. Каждый гибкий модуль 2 состоит из попарно состыкованных идентичных двухслойных пластин 5 прямоугольного сечения, слои которых выполнены из материалов с различными коэффициентами линейного расширения. Слой с большим коэффициентом линейного расширения является активным, а слой с меньшим коэффициентом линейного расширения - пассивным. Каждая из двухслойных пластин связана с источником питания посредством электропроводов 6. Каждая пара двухслой- .ных пластин 5 гибкого модуля связана с. двухслойными пластинами смежных гибких модулей, образуя прямоугольные полосы 7, объединенные опорными элементами 3 в цилиндрический каркас. При этом на нижней и верхней поверхностях прямоугольных полос 7 имеет место чередование активных и пассивных слоев. Стыковка гибких модулей 2 обеспечивается, например, сваркой, склеиванием и т.п.
Диски изготовлены из конструкционного электроизоляционного материала (например, пластмассы, стекла, керамики) и неподвижно связаны (склеиванием, замковым соединением, винтами и т.п.) с прямоугольными полосами.
Диски расположены на равных расстояниях друг от друга, а соединяющие их прямоугольные полосы параллельны друг другу и крепятся к дискам с тем, чтобы их продольные оси были параллельны продольной оси механической руки. Крепление дисков всегда приходится либо на линию стыковки отдельных пластин в прямоугольной полосе, либо на середину отдельных пластин. Диски и прямоугольные полосы 7 пенпендикуляр- ны друг другу. В зависимости от варианта исполнения концевые отдельные пластины либо равны по длине неконцевым пластинам, либо равны половине их длины. Прямоугольные пластины электрически соединяются между собой в зависимости от выполненного варианта исполнительного органа. Соединенные между собой двухслойные пластины (например, параллельно или последовательно или смешанно) проводами электропитания 5 присоединяются к блокам управления и электропитания.
В примерах на фиг.1 и 6, электропроводы подключены параллельно. Параллельно подключены и пластины 5. Объединения дисков и пластин создают единую жесткую
конструкцию, в которой параллельность прямоугольных полос 7 обеспечивает симметричность деформаций. В случае необходимости увеличения жесткости увеличивают диаметр дисков и поэтому ста0 новится возможным увеличение числа укрепляемых на них прямоугольных полос 7. На фиг.1 приведен манипулятор, в котором обеспечивается поступательное перемещение захватного устройства 4 за счет
5 симметричного закрепления прямоугольных полос 7 на дисках.
На фиг.б приведен манипулятор, в котором плоскости прямоугольных полос распо- ложены параллельно друг другу и
0 обеспечивается перемещение захватного устройства 4 в двух взаимно перпендикулярных направлениях.
Манипулятор работает следующим образом.
5 Возвратно-поступательное перемещение осуществляется следующим образом.
При подаче энергии к двухслойным пластинам 5 каждого гибкого модуля 2 (например, нагрева магнитострикцией,
0 электрострикцией обратным пьезоэффек- том)слои пластины 5, имея различные коэффициенты линейного расширения, деформируются и перемещают диск, а, следовательно, и захватное устройство 4, Пере5 мещение захватного устройства 4 определяется как общее суммарное перемещение всех дисков.
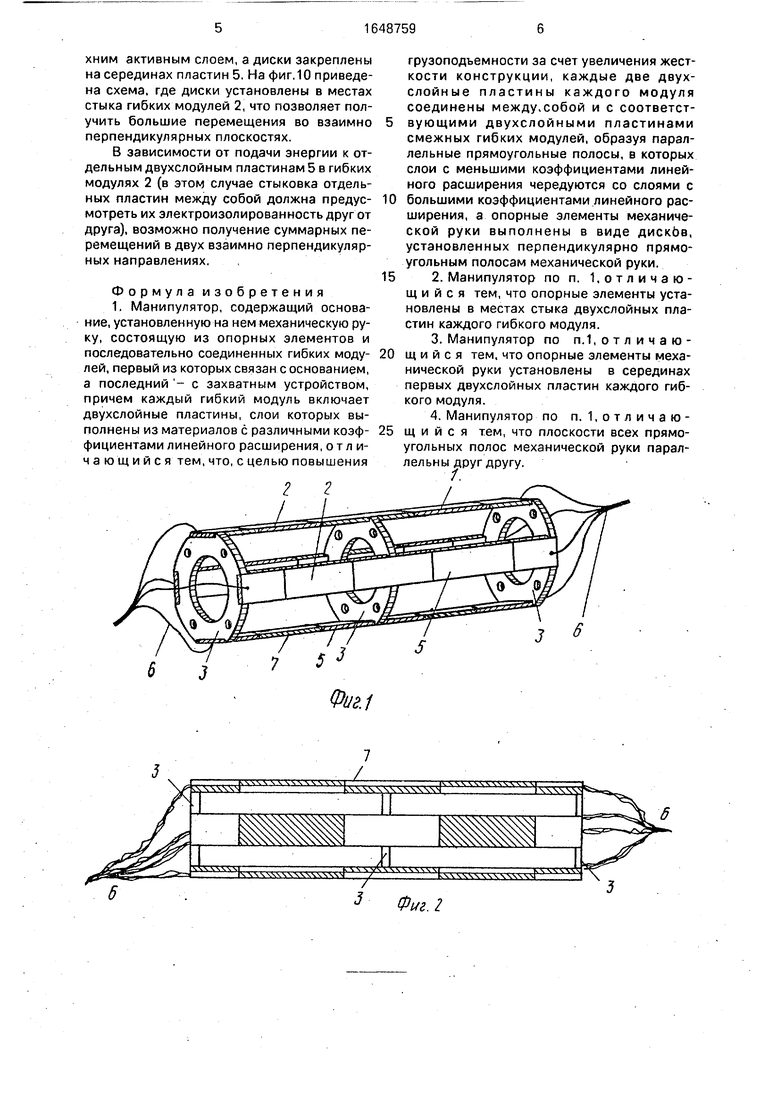
При установке дисков в серединах первых двухслойных пластин 5 с пассивным
0 слоем (фиг.2) имеют направленность изгиба двухслойных пластин 5 к продольной оси, а при установке дисков в серединах пластин 5 с активным слоем (фиг.З) - направленность изгиба от продольной оси.
5 Закрепление дисков в местах стыка гибких модулей 2 или в середине первых пластин модулей обеспечивает параллельность расположения дисков по отношению друг к другу при деформациях прямоугольных по0 лос 7. При отключении энергии исполнительное устройство возвращается в исходное положение.
Для осуществления возвратно-поступательного перемещения захватного устрой5 ства 4 со смещением в параллельную плоскость относительно продольной оси используется вариант выполнения исполнительного органа, изображенный на фиг.б. На фиг.9 приведена схема изгиба пластин 5, когда первые пластины 5 выполнены с верхним активным слоем, а диски закреплены на серединах пластин 5. На фиг,10 приведена схема, где диски установлены в местах стыка гибких модулей 2, что позволяет получить большие перемещения во взаимно перпендикулярных плоскостях.
В зависимости от подачи энергии к отдельным двухслойным пластинам 5 в гибких модулях 2 (в этом случае стыковка отдельных пластин между собой должна предус- мотреть их электроизолированность друг от друга), возможно получение суммарных перемещений в двух взаимно перпендикулярных направлениях.
Формула изобретения 1. Манипулятор, содержащий основание, установленную на нем механическую руку, состоящую из опорных элементов и последовательно соединенных гибких моду- лей, первый из которых связан с основанием, а последний - с захватным устройством, причем каждый гибкий модуль включает двухслойные пластины, слои которых выполнены из материалов с различными коэф- фициентами линейного расширения, отличающийся тем, что, с целью повышения
2 2
грузоподъемности за счет увеличения жесткости конструкции, каждые две двухслойные пластины каждого модуля соединены между,собой и с соответствующими двухслойными пластинами смежных гибких модулей, образуя параллельные прямоугольные полосы, в которых слои с меньшими коэффициентами линейного расширения чередуются со слоями с большими коэффициентами линейного расширения, а опорные элементы механической руки выполнены в виде дискбв, установленных перпендикулярно прямоугольным полосам механической руки.
2.Манипулятор по п. 1,отличаю- щ и и с я тем, что опорные элементы установлены в местах стыка двухслойных пластин каждого гибкого модуля.
3.Манипулятор по п.1, о т л и ч а ю - щ и и с я тем. что опорные элементы механической руки установлены в серединах первых двухслойных пластин каждого гибкого модуля.
4.Манипулятор по п. 1,отличающий с я тем, что плоскости всех прямоугольных полос механической руки параллельны друг другу.
7.
3
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1194669A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1194671A1 |
| Манипулятор Тенгиза | 1983 |
|
SU1212780A1 |
| Модуль манипулятора Тенгиза | 1980 |
|
SU933451A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1189674A1 |
| Модуль манипулятора | 1980 |
|
SU929431A1 |
| Модуль манипулятора Тенгиза | 1980 |
|
SU891427A1 |
| Модуль манипулятора | 1984 |
|
SU1217662A1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Модуль манипулятора | 1984 |
|
SU1197834A1 |
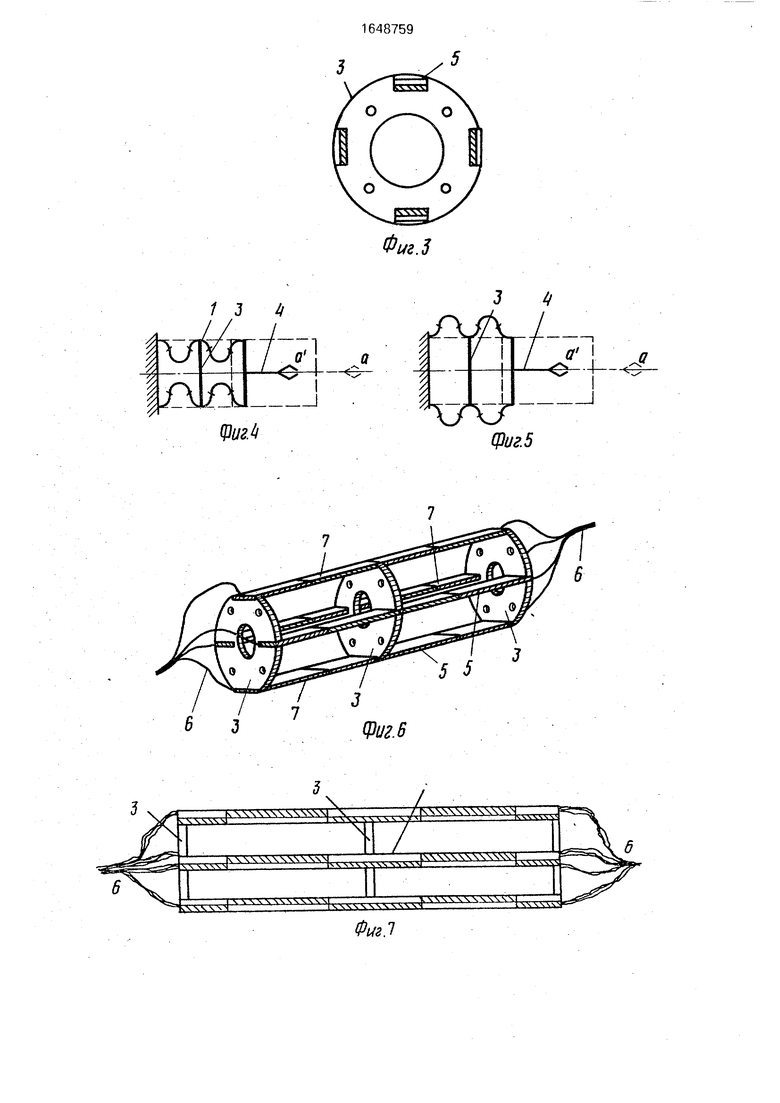
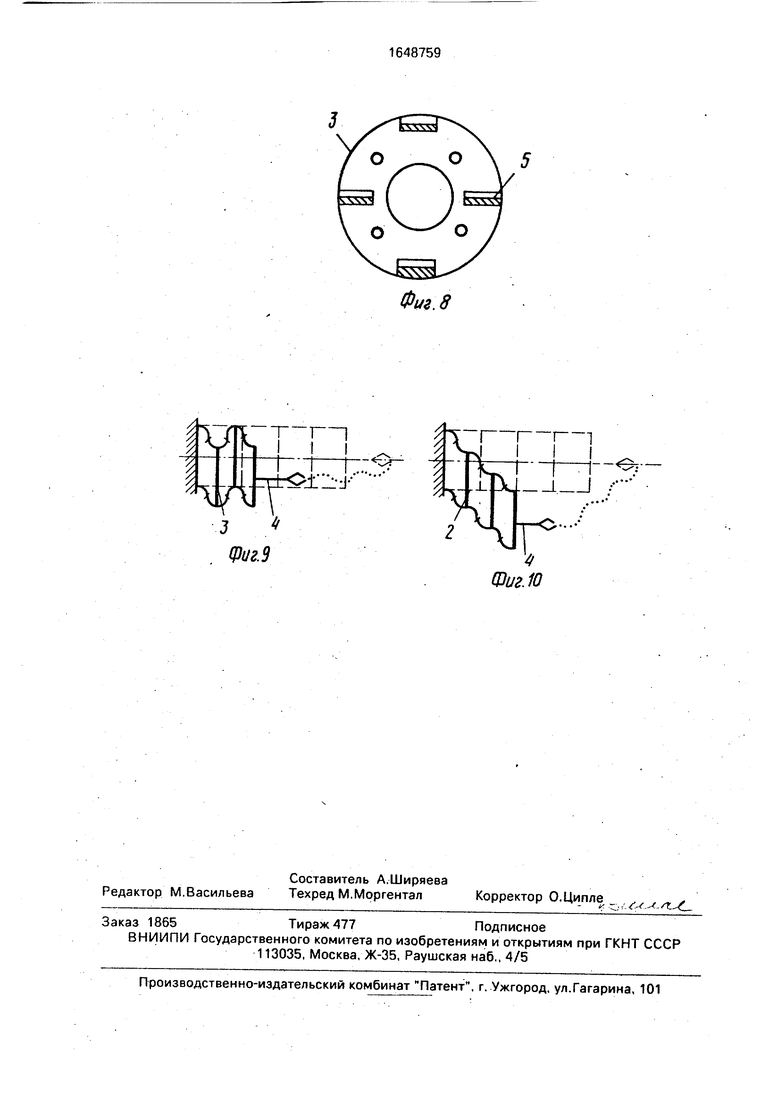
Изобретение относится к робототехнике и может быть использовано в различных конструкциях манипуляторов промышленных роботов. Целью изобретения является повышение грузоподъемности за счет увеличения жесткости конструкции. Манипулятор состоит из основания и механической руки 1 с захватным устройством. Механическая рука 1 выполнена в виде гибких модулей 2. опорных элементов 3 в виде дисков и захватного устройства. Каждый из гибких модулей 2 включает попарно состыкованные двухслойные пластины 5, слои которых выполнены из материалов с различными коэффициентами линейного расширения. Каждая двухслойная пластина 5 гибкого моИзобретение относится к робототехнике и может быть использовано в различных конструкциях манипуляторов промышленных роботов. Целью изобретения является повышение грузоподъемности за счет увеличения жесткости конструкции. На фиг. 1 изображен манипулятор, обеспечивающий возвратно-поступательное перемещение вдоль продольной оси; на фиг.2 - то же, вид сбоку; на фиг.З - исполнительный дуля 2 связана с пластиной 5 соседнего гибкого модуля 2, образуя прямоугольные полосы 7. Параллельные прямоугольные полосы 7 образуют цилиндрический каркас посредством опорных элементов 3 в виде дисков, расположенных в местах стыковки пластин 5 двух соседних гибких модулей 2 или по середине первой пластины 5 каждого гибкого модуля 2, при этом в каждой прямоугольной полосе 7 слои с меньшими коэффициентами линейного расширения чередуются со слоями с большими коэффициентами линейного расширения. Для получения возвратно поступательного перемещения захватного устройства 4 слои в одноименных пластинах 5 каждой прямоугольной полосы 7 с одинаковым коэффициентом линейного расширения направлены к продольной оси. Для получения перемещений в двух взаимноперпендикулярных плоскостях прямоугольные полосы установлены так, что их плоскости параллельны друг другу и слои дополнительных пластин с одинаковым коэффициентом линейного расширения обращены в одну сторону. 3 з.п. ф-лы, 10 ил. орган, поперечный разрез; на фиг,4 - схема, поясняющая работу манипулятора (фиг.1) при симметричной выгнутости отдельных пластин к продольной оси; на фиг.5 - то же, при симметричной выгнутости отдельных пластин от продольной оси; на фиг.б - манипулятор, обеспечивающий перемещение в двух взаимно перпендикулярных плоскостях; на фиг.7 - исполнительный орган, вид сбоку; на фиг.8 - исполнительный орган, поперечный разрез; на фиг.9 - схема, пояссл с о 00 VJ сл о
Фим
3 Фиг. 2
1 J Ь
I
з
ю
;1
0-fLlI
fe.4
В Z
L
sssssssssssssi :y v.../ sssssssss
.ЧЧЧ чЧЧЧУчЧЧч чх ч
Фиг.З
J 4
ЛД-/- ТАГГГ r
o-hф /г.5
5
Фиг. 6
L
v.../ sssssssss
S5S
ЧУЧЧЧЧУ Ч.У
фиг.9
Фиг. 8
I
Фиг. 10
| Исполнительный орган манипулятора | 1984 |
|
SU1194669A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
