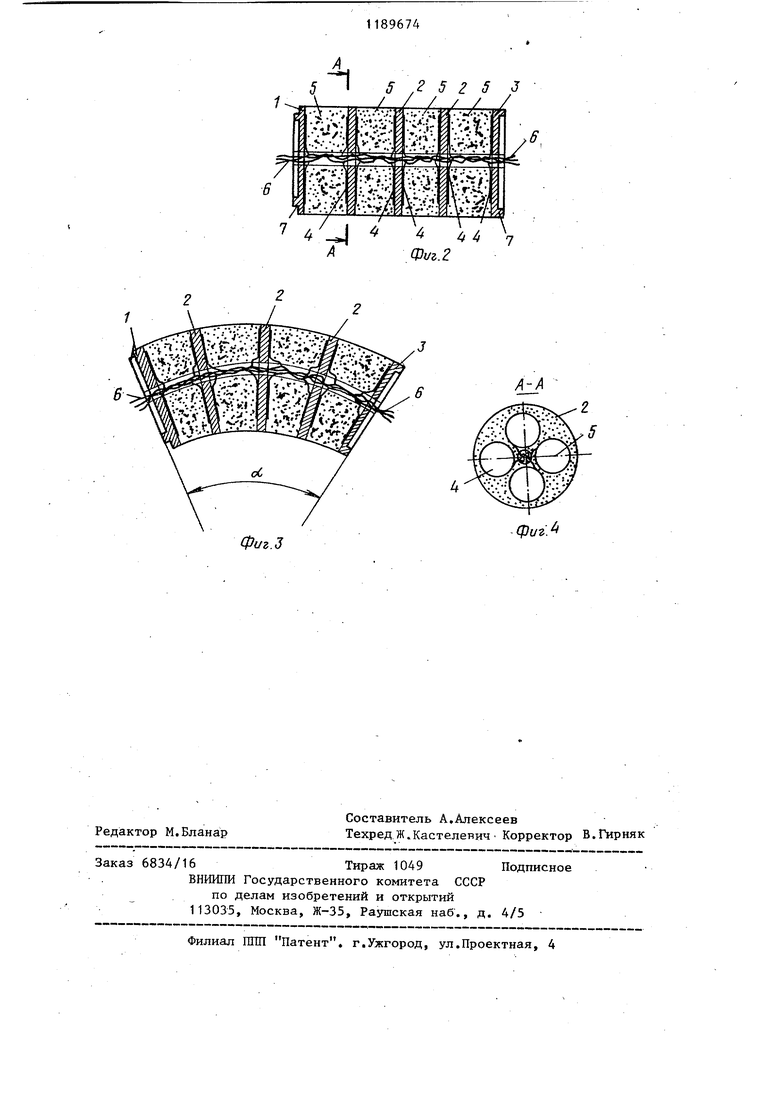
фиг.1 1 Устройство относится к машине- . строению, в частности к манипуляторам и предназначено для манипулиров ния в пространстве объектами. Цель изобретения - упрощение конструкции. На фиг. 1 изображен исполнительный орган манипулятора, общий вид} на фиг. 2 - модуль манипулятора; на фиг. 3 - мсздуль в момент изгиба: на фиг. 4 - сечение А-А на фиг. 2. Исполнительный орган манипулятора содержит начальный опорный эле мент 1 модуля, промежуточные опорные элементы 2, оконечный опорный элемент 3 модуля, приводные элементы 4, упругие элементы 5 из электро изоляционного материала, кабель 6, соединительные буртики 7, место 8 крепления исполнительного органа ма .нипулятора, захватное устройство 9, угол 0 взаиморасположения плоскостей опорных дисков. Исполнительный орган манипулятор состоит из одинаковых модулей, которые последовательно присоединены один к другому. Первьй модуль присоединен, к месту крепления. К последнему модулю крепится схват. Каждый из модулей вьшолнен в виде набора несущих опорньк элементов 1-3. Между концевыми опорными элементами начальным 1 и конечным 3, находятся промежуточные опорные элементы 2 Опорные элементы вьшолнены из элект роизоляционного материала, например пластмассЫо С торцовых сторон к опорным элементам прикреплены приводные элементы 4, вьтолненные в ви де круглых дисков из токопроводящег материала и расположенные симметрич но относительно центра опорного эле мента. Все опорные элементы вьшолнены с круглыми отверстиями в центре. К концевым опорным элементам 1 и 3 с внутренних торцов и к промежуточным опорным элементам 2 с обоих тор цов через приводные элементы жестк присоединены упругие элементы 5 из электроизоляционного материала (например, паралона, пористой резиньг и т.п.). Упругие элементы вьшолнены в виде цилиндров, в которых по продольной оси выполнено круглое отвер стие того же диаметра, что и в опор ных дисках, через эти отверстия к хфиводным элементам по кабелю 6 742 подводится электроэнергия. С наружных торцов концевые опорные элемен - ты снабжены соединительным буртиком 7 с резьбой. При соединении модулей резьбовое кольцо из буртика предыдущего модуля ввинчивается в резьбовое буртиковое кольцо последующего модуля. В межмодульные полости помещены элементы блока управления.. Работа исполнительного органа манипулятора заключается в перемещении конца захватным устройством 9 относительно места В крепления начального опорного элемента первого модуля. В последовательности модулей каждый предыдущий модуль является ведущим для последующих, ведомых, т.е. перемещение захватного устройства сводится к сумме перемещений отдельных модулей. Перемещение в модуле сводится к взаимоперемещению концевых (начального и конечного) опорных элементов. В свою очередь и это перемещение складывается из отдельных перемещений между промежуточными опорными элементами. При подаче энергии к приводным элементам приводные элементы либо притягиваются, либо отталкиваются. В совместной работе участвует одновременно пара приводных элементов 4, находящихся на разных опорных элементах один против другого. При вьтолнении приводных элементов 4 в виде круглых пластинчатых дисков, когда на приводные диски 4 поданы различные напряжения от источника питания, диски составляют конденсатор с круглыми обкладками и обкладки притягиваются одна в друтой, что влечет притяжение пары опорных элементов. Упругие элементы 5 под воздействием этой силы прогибаются, а опорные элементы 1-3 сближаются. Это сближение передается всем последующим звеньям цепочки, включая и концевые опорные элементы. При одновременной работе всех приводных элементов весь, модуль видоизменяется в зависимости от коммутации включения пар опорных элементов. Геометрически это выражается в перемещении как одна относительно другой плоскостей концевых опорных элементов, так и относительно начальной продоЛьной оси модуля.
4 i, , Ф1/г.2
Фиг.З
фи.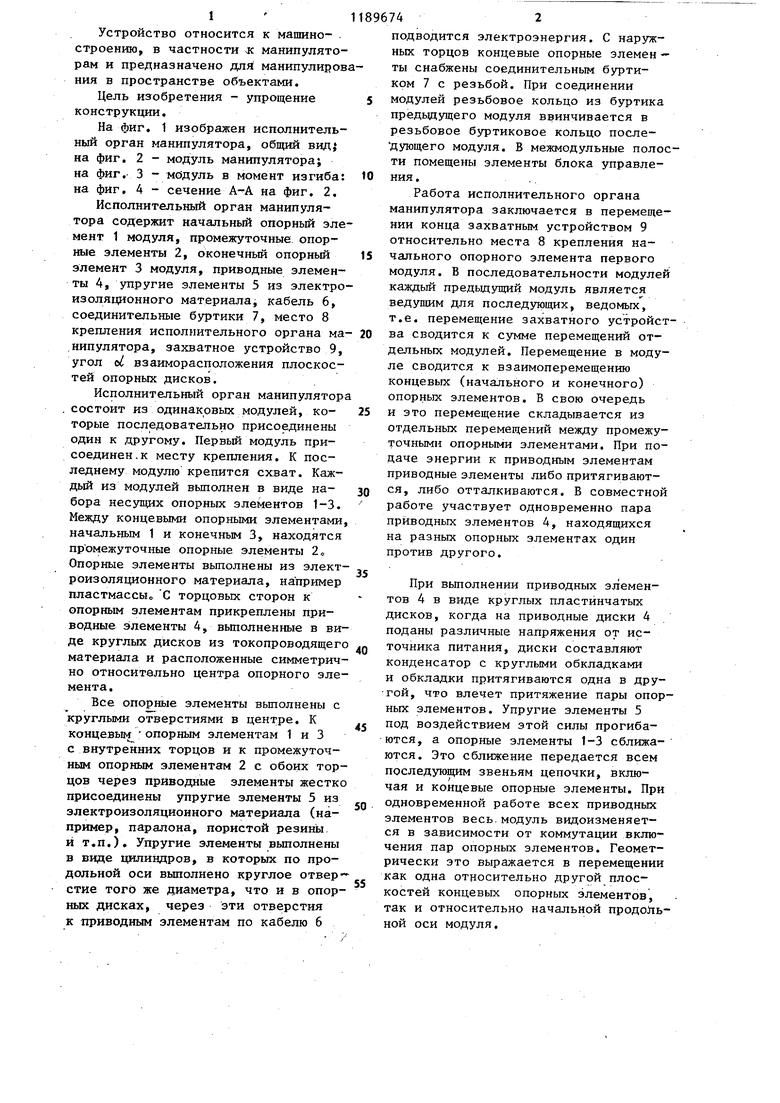
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1984 |
|
SU1194669A1 |
| Манипулятор | 1987 |
|
SU1648759A1 |
| Модуль манипулятора | 1984 |
|
SU1197834A1 |
| ПРОТЕЗНЫЙ ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2472470C2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО С ПОДВИЖНОЙ КОНСТРУКЦИЕЙ, ТАКОЕ КАК РОБОТ | 2018 |
|
RU2763460C2 |
| Исполнительный орган манипулятора | 1984 |
|
SU1194671A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| АБРАЗИВНЫЙ ИНСТРУМЕНТ НА ОСНОВЕ ВУЛКАНИЗИРОВАННОГО ВОЛОКНА | 2014 |
|
RU2671226C1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
ИеПОШИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий гибкие модули. каждый из которых снабжен опорными элементами с упругими элементами между ними и щ)иводом, отличающийся тем, что, с целью упрощения конструкции, привод выполнен из обкладок конденсатора,- размещенных на соседних опорных элементах, а упругие элементы и опорные элементы выполнены из электроизоляционного материала.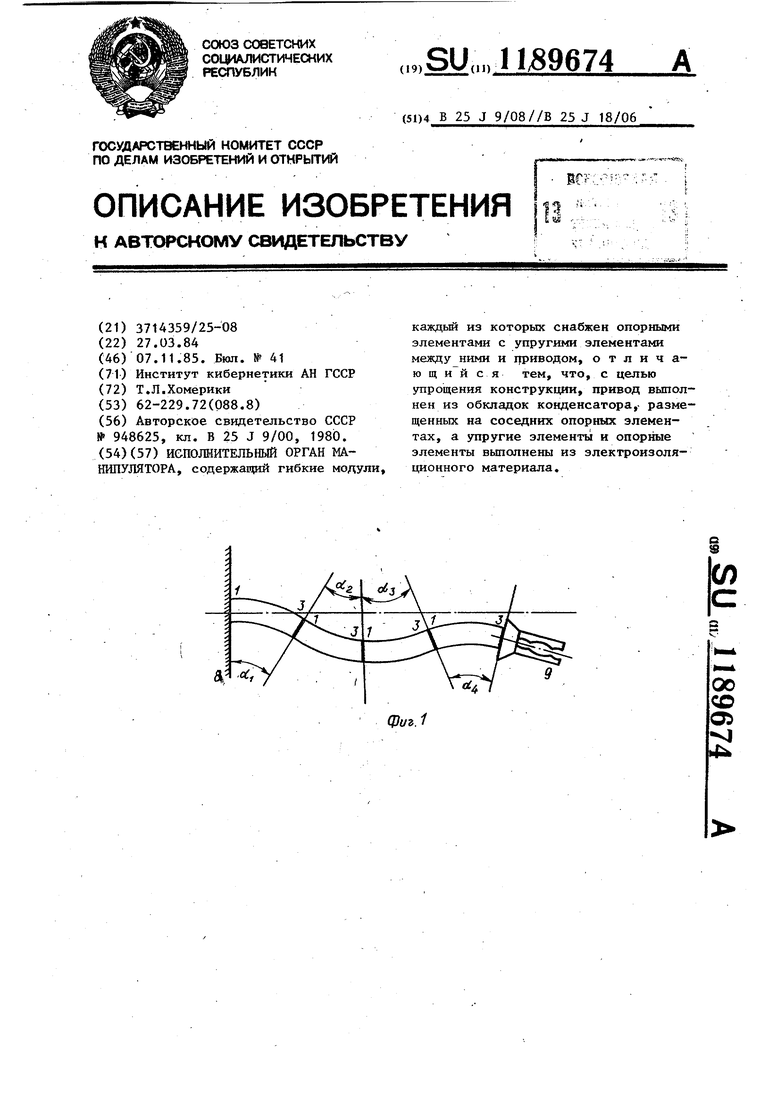
| Способ плоского шлифования | 1978 |
|
SU948625A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
