С 5) СИСТЕМА КОМПЕНСАЦИИ ЛОФТА В СИЛОВОЙ ПЕРЕДАЧЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Устройство для управления нажимнымиВиНТАМи | 1979 |
|
SU829235A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| КОММУТИРУЕМЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ НЕСИНУСОИДАЛЬНОСТЬЮ НАПРЯЖЕНИЯ | 2006 |
|
RU2310972C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 1992 |
|
RU2036808C1 |
| ИНВЕРТОР НАПРЯЖЕНИЯ С ПОНИЖЕННЫМ СОДЕРЖАНИЕМ ВЫСШИХ ГАРМОНИК | 1999 |
|
RU2172057C2 |
| Устройство для управления реверсивным электродвигателем постоянного тока с электромагнитным тормозом | 1981 |
|
SU1053246A1 |
| Система автоматического управления телескопом | 1980 |
|
SU974334A1 |
| Электропривод переменного тока | 1988 |
|
SU1636980A2 |
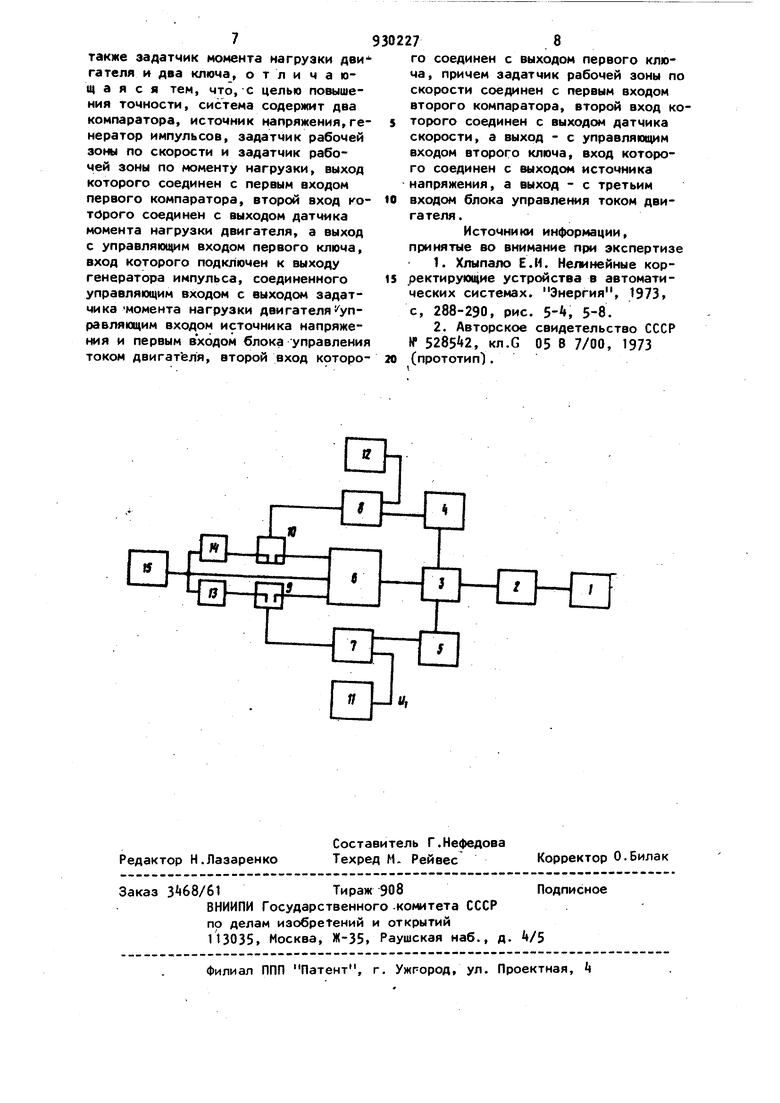
Изобретение относится к системам регулирования неэлектрических величин и может применяться, например, в системах регулирования скорости, п ложения вала механизма, имеющего люфт в силовой передаче, находящийся между точками прилож.ения активного момента (момент приводного двигателя) и момента сопротивления нагруз ки механизма. Известно устройство контроля и устранения действия люфта на динамику системы управления скоростью вала механизма путем фиксации автоколебаний, обусловленных наличием люфта, и при наличии последних, введе,нием корректирующего сигнала на вход Системы О. Недостатком указанного устройства являеУся то, что может использоваться только в системах регулирования, в некоторых люфт обусловлива.ет нелинейные автоколебания. Существует широкий класс систем регугм рования, содержащих в силовой передаче люфт, который в нормальных режимах работы не вызывает автоколебаний. Для таких систем регулирования это устройство непригодно. Наиболее близкой по технической сущности к предлагаемой является система, содержащая последовательно соединенные блок управления током двигателя и двигатель, выход которого соединен с датчиками скорости и момента нагрузки двигателя, а также задатчик момента нагрузки двигателя и два ключа 23. Однако известная Система не обеспечивает требуемой точности и надежности при наличии люфта в силовой передачи . Цель изобретения - повышение точности системы за счет компенсации люфта силовой передачи. Поставленная цель достигается тем, что система содержит два компаратооа, источник напряжения, генератор 39 импульсов, задатчик рабочей зоны по скорости и задатчик рабочей зоны по моменту нагрузки, выход которого соединен с первым входом первого ком паратора, второй вход которого соеди нен с выходом датчика момента нагруз ки двигателя, а выход - с управляющим входом первого ключа, вход которого подключен к выходу генератора импульсов, соединенного управляющим входом с выходом задатчика момента нагрузки двигателя, управляющим входом источника напряжения, и первым входом блока управления током двигателя, второй вход которого соединен с выходом первого ключа, причем за датчик рабочей зоны по скорости соединен с первым входом второго компаратора, второй вход которого соединен с выходом датчика скорости, а выход - с управляющим входом второго ключа, вход которого соединен с выходом источника напряжения, а выход с третьим входом блока управления током двигателя. На чертеже приведена блок-схема устройства. Устройство содержит механизм 1, силовую передачу с люфтом 2 (редуктор), двигатель 3 постоянного- тока с датчиками и 5 соответственно скорости и момента нагрузки двигателя 3, блок 6 управления током (.моментом) двигателя 3, компараторы 7 и 8, ключи 9 и 10, задатчик 11 рабочей зоны по моменту нагрузки, задатчик рабочей зоны по скорости 12, генератор 13 импульсов, источник ik напряжения, задатчик 15 момента нагрузки двигателя. , Компенсация люфта в силовой передаче 2 основана на следующем. В момент размыкания люфта в ведущем элементе силовой передачи 2 нагрузка С момент сопротивления) скачком уменьшается до уровня М , определяемого механическими потерями исполнительного двигателя 3 и элементов силовой передачи (.механизма , находящихся между двигателем и люфтом, т.е. потерями ведущего элемента силовой передачи. Следовательно измерение нагрузки (момента сопротивления) ведущего эле мента силовой передачи, сравнение этой нагрузки с контрольным сигналом А, где L. - малая величина, позволяет эффективно контролировать разомкнутое состояние люфта силовой передачи с помощью сигнала наличия люфта, вырабатываемого в моменты, когда нагрузка ведущего элемента снижается ниже -уровня MO -«-А . Замыкание люфта предлагаемый способ обеспечивает посредством операции подачи выходного сигнала генератора 13 импульсов на вход блока 6 управления моментом ведущего элемента силовой передачи. При этом момент ведущего элемента силовой передачи увеличивается, что приводит к оперативному замыканию люфта и исчезновению сигнала наличия люфта. Исчезновение сигнала наличия люфта обусловливает прекращение работы генератора 13 импульсов. Известные датчики ( измерители) момента нагрузки, например, двигателя постоянного тока надежно работают при скорости двигателя отличной от нуля. При нулевбй скорости погрешность измерения момента нагрузки резко возрастает. Поэтому для повышения надежности замыкания люфта (гарантированного замыкания при нулевой скорости система обеспечивает операцию подачи дополнительного сигнала на вход системы 6 управления током двигателя. Этот сигнал вызывает увеличение момента ведущего элемента передачи, что гарантирует замкнутое состояние люфта. При этом надежная стоянка механизма.с выбранным люфтом обеспечивается, если выходной сигнал задатчика рабочей зоны по скорости 12 обеспечивает момент двигателя (ведущего элемента) несколько выше уровня MQ и ниже уровня суммарного момента нагрузки механизма, приведенного к валу двигателя. Блок 6 регулирования тока представляет собой замкнутый контур регулирования тока якоря двигателя и включает в себя последовательно соединенные датчик тока, регулятор и управляемый источник якорного напряжения. Датчик k скорости выполнен на базе техогенератора. Датчик 5 момента нагрузки двигателя включает в себя дифференциатор и сумматор, алгебраически суммирующий выходной сигнал датчика тока якоря с сигналом первой производной от скорости двигателя. Компараторы 7 и 8 обеспечивают появление на своих выходах сигналов всякий раз, как только выходные сиг налы соответственно датчиков 5 и станут по модулю ниже уровня опорны сигналов, снимаемых соответственно с задатчиков 11 и 12. Задатчик 11 рабочей зоны по нагрузке содержит на своем выходе сиг нал, уровень которого соответствует уровню сигнала датчика 5, при наличии на входе последнего момента нагрузки, незначительно превышающего Мр . Задатчик 12 рабочей зоны по скорости обеспечивает на своем выходе сигнал, уровень которого близок к нулю. Источник I напряжения выдает си нал IJj, уровень которого обеспечивает момент двигателя 3, превышающи несколько величину MQ, а знак U соответствует знаку задатчика 15 мо мента. Генератор импульсов 13 представляет собой генератор импульсов задан ной частоты. При этом каждый импульс генератора описывается уровнениемI . IU)А р U)-71 (t -т/2)+-Kt-г) , ( где 1Г - длительность импульса А - коэффициент, знак которого соответствует знаку выходного сигнала задатчика 15 момента двигателя. Величины А ,Ти частота генератора 13 импульсов выбираются, исходя из конкретных динамических характеристик блока 6 и двигателя 3- В качестве задатчика 15 момента двигателя может быть использован, например, регулятор скорости, входы которого связаны с выходами задатчика и датчи ка скорости. Рассмотрим работу устройства в ди намике на примере торможения механизма от некоторой установившейся скорости до нулевого значения. При этом будем полагать, что отношение момента двигателя к его моменту инерции приблизительно равно отношению момента нагрузки механизма к моменту инерции последнего. Указанные условия в процессе торможения обеспечивают размыкание люфта. В исходном состоянии двигатель обесЛечивает момент на валу,- равный моменту нагрузки механизма и постоянную скорость вращения вала механизма. После изменения величины и зн ка выходного сигнала задатчика 15 момента двигателя, двигатель 3 г ерейдет в режим торможения, что обеспечивает размыкание люфта в силовой передаче. Момент нагрузки на валу двигателя резко падает, компаратор 7 срабатывает, ключ 9 замыкается, на вход системы управления током двигателя 6 поступают импульсы с выхода генератора 13 импульсов, которые вызывают более интенсивное, по сравнению с валом механизма, торможение вала дви гателя. Люфт замыкается, момент нагрузки двигателя возрастает, компаратор 7 возвращается в исходное состояние, размыкая ключ 9- В процессе торможения раз шкание люфта может повторяться многократно и всякий раз срабатывание 2 рмпаратора 7 приводит к замыканию люфта. При подходе скорости двигателя к нулю выходной сигнал задатчика 15 момента двигателя снижается до нуля, срабатывает компаратор 8, ключ 10 замыкается и на вход системы управления током двигателя 6 поступает выходной сигнал источника 14 напряжения,который обеспечивает замыкание люфта, если последний по каким-либо причинам остался разомкнутым. Система (механизм) приходит в новое статическое состояние, характеризуемое нулевым значением скорости вала двигателя. Предложенная система компенсации люфта позволяет эффективно контролировать и устранять люфт в силовой передаме и обеспечить высокие динамические показатели систем регулирования выходных координат механизма без опасения возникновения автоколебаний, ударов и других вредных явлений, обусловливаемых люфтом. Кроме того, надежный контроль и устранение люфта при нулевой скорости стоянке механизма) повышает точность регулирования положения вала механизма и позволяет использовать более простые дешевые измерители момента нагрузки. Формула изобретения Система компенсации 1Юфта в силовой передаче, содержащая последова-г тельно соединенные блок управления током двигателя и двигатель, выход которого соединен с датчиками скорости и момента нагрузки двигателя, а
также эадатчик момента нагрузки двигателя и два ключа, о т л и ч а rout а я с я тем, что, с целью повышения точности, система содержит два компаратора, источник напряжения,генератор импульсов, задатчик рабочей зоны по скорости и задатчик рабочей зоны по моменту нагрузки, выход которого соединен с первым входом первого компаратора, второй вход которого соединен с выходом датчика момента нагрузки двигателя, а выход с управляющим входом первого ключа, вход которого подключен к выходу генератора импульса, соединенного управляющим входом с выходом задатчикамомента нагрузки двигателя управляющим входом источника напряжения и первым входом блока управления током двигателя, второй вход которого соединен с выходом первого ключа. Причем задатчик рабочей зоны по скорости соединен с первым входом второго компаратора, второй вход которого соединен с выходом датчика скорости, а выход - с управляющим входом второго ключа, вход которого соединен с выходом источника напряжения, а выход - с третьим
входом блока управления током двигателя.
Источники информации, принятые во внимание при экспертизе
с, 288-290, рис. 5-, 5-8.
(прототип).
