MJM входами соответственно-вторые входы элементов 2И-НЕ и 2ИЛИ-НЕ соответственно первого и второго каналов, а выходами - выходы первых элементов ЗИЛЙ-НЕ каждого канала.
3. Устройство по П.1, от л и ч ающее с я тем что формирователь одиночных импульсов управляемой длительности выполнен в виде генератора линейно изменяющегося напряжения и компаратора, выход которого является выходом упомянутого формирователя, первый вход - его управляющим входом, а второй вход под.ключей кВЫХОДУ упомянутого генератора},вход которого является запускающим входом указанного формирователя .
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь синусно-косинусных сигналов в последовательность импульсов | 1988 |
|
SU1737731A1 |
| Устройство для управления силовыми ключами плеча инвертора | 1989 |
|
SU1757045A1 |
| Электропривод постоянного тока | 1990 |
|
SU1741247A1 |
| Устройство для моделирования вентильного преобразователя | 1981 |
|
SU968829A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Многоканальное устройство для ввода информации от двухпозиционных датчиков | 1988 |
|
SU1550521A1 |
| Групповой преобразователь частоты | 1987 |
|
SU1436236A2 |
| Устройство для управления трехфазным инвертором | 1984 |
|
SU1354365A1 |
| Устройство для ввертывания сердечников в катушки | 1987 |
|
SU1642531A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ-ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА С ЭЛЕКТРОМАГНИТНЫМ ТОРМОЗОМ, содержащее эадатчик положения и датчик положения выходного вала электродвигателя, выходами подключенные к входам усилителя рассогласования с формирователем сигналов управления, выходы которого подключенй к управляющим входам силовых ключей цепей питания обмоток электродвигателя, отличающееся тем, что, с целью повышения быстродействия и точности установки валаэлектродвигателя в заданное положение, формирователь сигналов управления выполнен с семью входами, введены дифференцирующий узел, входом подключенный к выходу датчика положения, два формирователя одиночных импульсов управляемой длительности, генератор импульсов, формирователь опорных напряжений и четыре компаратора, одни входы которых соединены с выходом ,усилителя рассогласования, другие входы - с соответствующими выходами формирователя опорных напряжений, а выходы - соответственно с первыми четырьмя входами формирователя сиг- I налов управления, пятый вход которого подключен к генератору импульсов, шестой и седьмой входы - к выходам соответственно первого и второго формирователей одиночных импульсов управляемой длительности, запускающий, вход каждого из которых соединен с выходом соответственно первого и четвертого компараторов, а управляющие входы - к соответствующему выходу дифференцирующего узла. 2. Устройство по п.1, отлиi чающееся тем, что формирователь сигналов управления выполнен (Л в виде двух идентичных каналов, каждый из которых содержит логические элементы 2ИЛИ-НЕ и 2И-НЕ, два логических элемента ЗИ-НЕ и три логи- ; ческих инвертора, выход первого из которых подключен к первому входу первого элемента ЗИ-НЕ, вторым входом соединенного с выходом второго сд Од элемента ЗИ-НЕ, первый вход которого через второй инвертор связан с выходом элемента 2И-НЕ, первым входом ю подключенного к выходу элемента. 4 2ИЛИ-НЕ того же канала, третий вход -первого элемента ЗИ-НЕ каждого канаЛ ла связан через третий инвертор другого качала с вторым входом элемента 2ИЛИ-НЕ другого канала, выход элемента 2И-НЕ каждого канала соединен с вторым входом второго эле мента ЗИ-НЕ другого канала, третьи входы которых объединены и являются пятым входом формирователя сигналов управления, первым и четвертым входами которого являются, объединенные между собой вход первого инвертора и первый вход элемента 2ИЛИ-НЕ соответственно первого и второго кдналов,вторым, шестым, третьим.и седь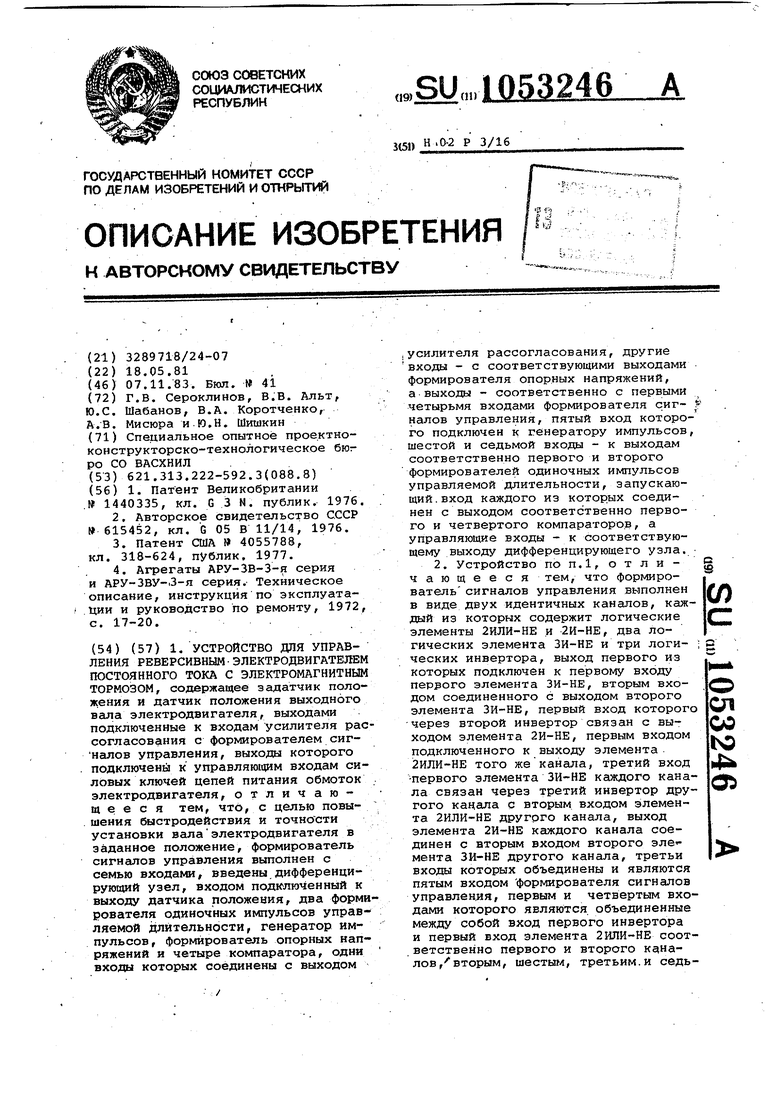
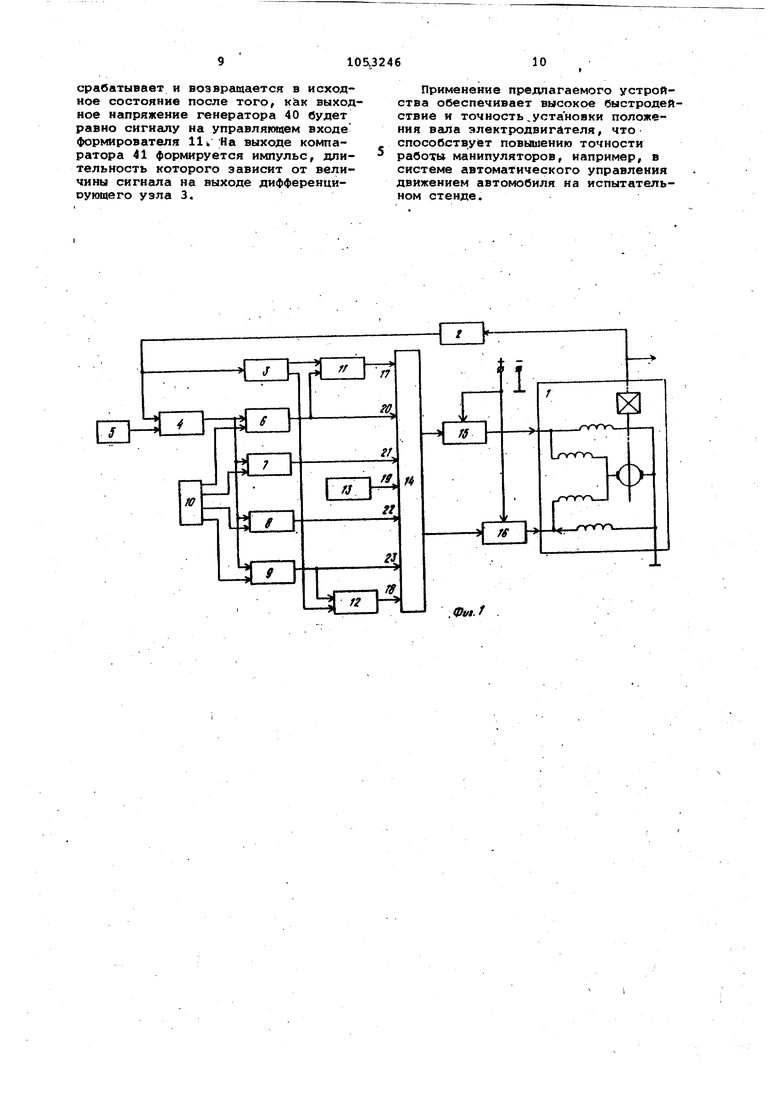
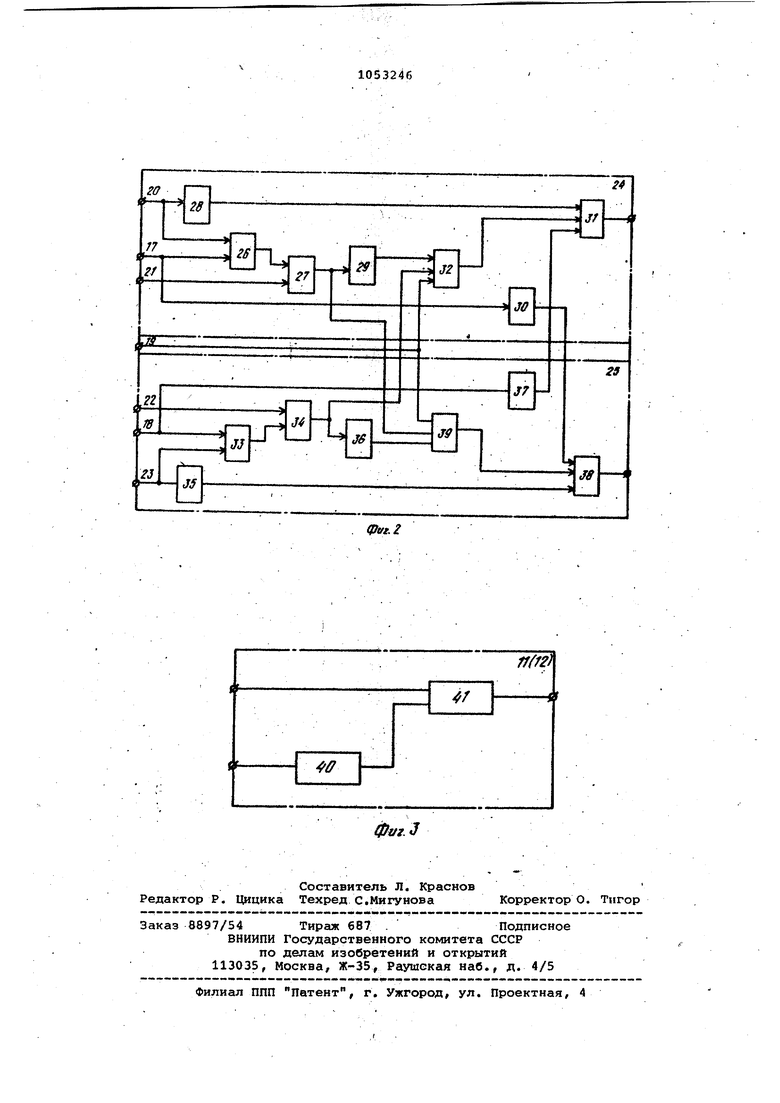
Изобретение относится к электро технике и может быть использовано в различных манипуляторах и следящих электроприводах в приборострое нии, где требуется -компенсировать реакцию нагрузки. Из-вестно устройство для управле ния электродвигателем постоянного тока, содержащее датчик положения, схеглу управления, усилитель, регулятор положения и регулятор скорости . Электродвигатель ускоряется до желаемой скорости под действием импульсного регулятора, охваченного обратной связью, а затем, когда объект приближается достаточно бли ко к,заданному положению, электродвигатель ступенчато притормаживается, после чего управление им осуществляется,в функции аналогового сигнала, пропорционально расстоя .нию до желаемого положения til. Недостатком данного устройства является невозможность управления электродвигателем с электромагнитным тормозом, который срабатывает при понижении или снятии напряжения аналоговым сигналом вблизи заданного положения. Известно устройство для управления электродвигателем, содержащее датчик рассогласования, генератор низкой частоты, блок анализа и переключения режимов движения, ждущий генератор импульсов, двигатель постоянного тока, редуктор и датчик шагов. В этом устройстве двигатель по сигналу рассогласования разгоняет- ся до заданной скорости, тормозится серией тормозных импульсов и ша гами устанавливается в заданное положение 2 . Недостатками такого устройства являются малое быстродействие, так как торможение осуществляется Серией импульсов, длительность которых не учитывает скорость движения элек тродвигателя, невозможность управления в зоне торможения электродвигателем с электромагнитным тормозом и сложность системы .при работе с аналоговыми датчиками. Известно устройство для управления электродвигателем, содержащее датчик положения, вырабатывающий сигнал пропорциональный положению вала электродвигателя, компаратор, сравнивающий сигналы датчика положения .и задатчика, формирователь сигналов управления, определяющий направление вращения электродвигателя и два силовых ключа ОЗ;}. Недостатками этого устройства являются низкая точность установки положения вала электродвигателя и малое быстродействие, вызванное низким качеством переходного процесса. Наиболее близким по технической сущности к изобретению является устройство для управления реверсивным электродвигателем постоянного тока с электромагнитным тормозом, которое содержит датчики высоты и скорости, выполняющие функции задатчика положения, датчик положения, соединенный через редуктор с выходным валом электродвигателя, усилитель рассогласования с формирователем -сигналов управления, опрелеляющим направление вращения электродвигателя, и два силовых ключа . Недостатками известного устройства являются низкая точность установки вала электродвигателя в заданное положение и малое быстродействие, ограниченное низким качеством переходного процесса. Цель изобретения - повышение быстродействия и точности установки вала электродвигателя в заданное положение путем улучшения качества переходного процесса. Поставленная цель достигается тем, что в устройство для управления реверсивным электродвигателем постоянного тока с электромагнитным тормозом, содержащее задатчик положения- и датчик положения выходного вала электродвигателя, выходами подключенные к входам усилителя рассогласования с формирователем сигнгшов управления, выходы которого прдключены к управляющим входам силовых ключей цепей питания обмоток электродвигателя, формирователь сигналов управления выполнен с семь входами, введены дифференцируюадай узел, входом подключенный к выходу датчика положения, два формирователп одиночных импульсов управляемой длительности, генератор импульсов, формирователь опорных напряжений и четыре компаратора, одни входы кото рых соединены с выходом усилителя рассогласования, другие входы - с соответствующими выходами формирова теля опорных напряжений, а выходы сЬответ.ственно с первыми четырьмя входами формирователя сигналов управления, пятый вход которого подключен к генератору импульсов, шеетой и седьмой входы - к выходам соответственно первого и второго формирователей одиночных импульсов управляемой длительности, запускающий вход каждого из которых соединен с выходом соответственно первого и четвертогокомпараторов, а управляю щие входы - к соответствующему выходу дифференцирующего узла, . Формирователь сигналов управления выполнен в виде двух идентичных каналов, каждый из которых содержит логические элементы 2ИЛИ-НЕ и 2ТЛ-.Щ, два логических элемента ЗИ-НБ и три логических инвертора, выход первого из которых подключен к первому входу первого элемента ЗИ-НЕ, вторым входом соединенного с вьгходом второго элемента ЗИ-НЕ, первый вход которого через второй инвертор связан с выходом элемента 2И-гНЕ, первым входом подключенного к выходу элемента 2ИЛИ-НЕ того же канала, третий вход первого элемента ЗИ-НЕ каждого канала связан через третий инвертор другого канала с вторым входом элемента 2ЙЛИ-НЕ другого канала, выход элемента 2И-Н каждого канала соединен с вторым входом второго элемента ЗИ-НЕ друго го канала, третьи входы которых объ единены и являются пятым входом фор мирователя сигналов управления, первым и четвертым входами которого являются объединенные между собой вход первого инверт-ора и первый вход элемента 2ИЛИ-НЕ соответственно первого и второго каналов, вторым, шестым, третьим и седьмым входами - соответственно вторые входы элементов 2И-НЕ и 2ИЛИ-НЕ соответст венно первого и второго каналов, 3 выходами - выходы первых элементов ЗИЛИ-НЕ каждого канала. Кроме того, формирователь одиноч ных импульсов управляемой длительности выполнен в виде генератора линейно изменяющегося напряжения и компаратора, выход которого является выходом упомянутого формирователя, первый вход - его управляющим входом, а второй вход подключен к выходу упомянутого генератора, вход которого является запускающим входсзм указанного формирователя. Такое выполнение устройства позволяет обеспечить максимально возможную скорость вращения электродвигателя, HHTeHCHJBHoe его торможение при приближении к заданному .положа- нию, учитывающие скорость его вращения,, что способствует повышению быстродействия, и точную установку положения вала электродвигателя с помощью импульсов, длительность которых обеспечивает шаговый режим работы электродвигателя с электромагнитным тормозом. На фиг. 1 изображена схема устройства для управления реверсивным электродвигателем постоян ого тока с электромагнитным тормозом; на фиг. 2 - схема формирователя сигналов управления;.На фиг. 3 - схема формирователя одиночных импульсов управляемой длительности. Устройство содержит электродвигатель 1 с электромагнитным тормозом, соединенный через редуктор с датчиком 2 положения выходного вала электродвигателя 1, дифференцирующий узел 3, усилитель 4 рассогласования, соединенный с эадатчиком 5 положения, четыре компаратора 6-9, формирователь 10 опорных напряжений, формирователи 11 и 12 одиночных импульсов управляемой длительности, генератор 13 импульсов, а также формирователь 14 сигналов управления, первый и второй выходы которого подключены соответственно к управляющим входам силовых ключей 15 и 16, которые подключены к обмоткам элек.тродвигателя 1. При этом первый вход усилителя 4 рассогласования соедиiHSH с датчиком 2 положения, с которым также соединен вход дифференцирующего узла 3, первый и второй выходы которого подключены соответственно к . управляющим входам первого формирователя 11 и второго формирователя 12 одиночных импульсов, выходы которых соединены с шестым 17 и седьмым 18 входами формирователя 14 сигналов управления, к пятому входу 19 которого подключен выход генератора 13 импульсов, а к первому 20, второму 21, третьему 22 И четвертому 23 входам соответственно выходы компараторов 6-9, при этом одни входы компараторов 6-9 соединены с выходом уси лителя 4 рассогласования, а други входы - соответственно с первым, вторым, третьим и четвертым выходами формирователя 10 опорных напряжений. Кроме того, выход компара тора б соединен с запускающим входом формирователя 11 одиночных импульсов, а выход компаратора 9 с запускающим входом формирователя,12 одиночных импульсов. Формирователь 14 сигналов управ ления (фиг. 2) срстоит из двух идентичных взаимосвязанных каналов 24 и 25. Первый канал содержит логические элементы 2ИЛИ-НЕ 26, 2И-НЕ 27, три логических инвертора 28-30 и два логических элемента ЗИ-НЕ 31 и 32. Аналогично второй канал содержит элементы 2ИЛИ-НЕ 33 2И-НЕ 34, три инвертора 35-37 и два элемента ЗИ-НЕ 38 и 39. Первый вход элемента 2ИЛИ-НЕ 26 является входом 20 формирователя 14 сигналов управления, второй вход - входом 17 формирователя 14, I а выход соединен с первым входом элемента 2И-НЕ 27, второй вход которого является входом 21 формирователя 14. Входы первого инверто 28 и третьего инвертора 30 являютс входами 20 и 17 формирователя 14 сигналов управления, вход второго инвертора 29 соединен с выходом эл мента 2Н-НЕ 27, который подключен также к второму входу второго элемента ЗИ-НЕ 39 второго канала. Выход второго инвертора 29 соединен с первым входом второго элемента ЗИ-НЕ 32, второй вход которого под ключен к выходу элемента 2И-НЕ -34 второго канала, а третий является входом 19 формирователя 14 сигнало управления,; при этом выход второго элемента ЗИ-НЕ 32 соединен с вторы входом первого элемента ЗИ-НЕ 31, первый вход которого соединен с вы ходом первого инвертора 28, а третий - с выходом третьего инвертора 37 второго канала. Кроме того, выход третьего инвертора 30 подключе к третьему входу первого элемента ЗИ-НЕ 38 второго канала, а выходы элемента .ЗИ-НЕ 31 первого канала и элемента ЗИ-НЕ 38 второго канала являются соответственно первым и в рым выходами формирователя 14 упра ления сигналов. Соединения элементов внутри вто рого канала являются идентичными соединениям внутри первого канала. Формирователь 11 одиночных импульсов управляемой длительности (фиг. 3) содержит генератор 40 линейно изменяющегосянапряжения и компаратор 41, первый вход и выход которого являются соответственно управляющим входом и выходом форми рователя 11 одиночных импульсов, а второй вход подключен к выходу ге нератора 40 линейно изменяющегося напряжения, входом которого является запускающий вход формирователя 11 одиночных импульсов. Аналогично ; выполнен формирователь 12 одиночных импульсов управляемой длительности. В предлагаемом устройстве д.пя упра-йления электродвигателем сочетаются два канала управления - грубый и точный. Управление по грубому каналу осуществляется при условии laul lu.,1 , где 4 и - управляющее воздействие (сигнал на выходе усилителя 4 рассогласования); и - напряжение срабатывания компаратора 6; -Uf - напряжение срабатывания компаратора 9. Управление по точному каналу осуществляется при условии |UJ laUl lUpl , где UQ - напряжение срабатывания компаратора 7; -UQ - напряжение срабатывания компаратора 8. Точность управления определяется зоной нечувствительности ди , ширина которой равна . aUp 2Uo. Устройство работает следующим образом. Текущее значение положения вала электродвигателя 1 поступает с выхода датчика 2 положения на входы . усилителя рассогласования и дифференцирующего узла 3, определяющего направление и скорость перемещения вала электродвигателя 1. В усилителе рассогласования сигнал с датчика 2 положения сравнивается с сигналом задатчика 5 положения, и формируется управляющее воздействие ли , поступающее на входы компараторов 6-9, уровень срабатывания которых задается формировав телем 10 опорных напряжений. Если управляющее воздействие IAU I больше и, то срабатывают компараторы 6 и 7, определяющие прямое направление вращения электродвигателя 1. Сигналы с выхода компараторов G и 7 поступают соответственно на входы 20и 21 формирователя 14 сигналов управления, где по ним формируется сигнал управления по грубому каналу, который поступает на силовой ключ 15. Силовой ключ 15 открывается, и к обмотке электродвигателя 1, обеспечивающей прямое направление вращения, прикладывается номинальное напряжение. Электродвигатель 1 растормаживае7ся электромагнитным тормозом, разгоняется до номинальной скорости и работает до момента срабатывания компаратора 6, который происходит при условииМи t
и
о
По сигналу компаратора б формирователь 14 сигналов управления (Снимает сигнал управления по грубому каналу с входа силового ключа 15 и по сигналу формирователя 11 одиночных импульсов управляемой длительности, который запускается при срабатывании компаратора 6, формирует управляющий сигнал, поступающий на вход силового, ключа 16. В результате этого силовой ключ 15 закрывается и с обмотки электродвигателя 1, обеспечивающей прямое направление вращения, напряжение снимается, а силовой ключ 16 открывается, и к о,бмотке электродвигателя 1, обеспечивающей обратное направление вращения, прикладывается номинальное напряжение. Электродвигатель 1 интенсивно тормозится. После окончания тормозного импульса, когда скорость электродвигателя 1 становится близкой к нулю, силовой ключ 16 закрывается, обмотка, обеспечивающая обратное направление вращения обесточивается, а формирователь 14 сигналов управления по выходному сигналу компаратора 7. вырабатывает сигнал управления по точному каналу. При управлении по точному каналу на вход силового ключа 15 поступает управляющий сигнал, полученный формирователем 14 сигналов управления по сигналу генератора 13 импульсов, поступающему на его вход 19, который обеспечивает включение силового ключа 15 на период действия импульса.
Питание электродвигателя 1 с электромагнитнь1М тормозом импульсным напряжением обеспечивает ему щаговый режим работы. Электродвигатель работает в таком; режиме до момента срабатывания компаратора 1, которое происходит при условии |ли I Uo,
По сигналу компаратора 7 формиррватель 14 сигналов управления снимает управляющий сигнал по точному каналу с входа ключа 15, электродвигатель 1 останавливается и затормаживается электромагнитным тормозом.
Управление электродвигателем .1 при перемещении в обратном направлении аналогично управлению при перемещении в прямом направлении и определяется соответственно компараторами 9 и 8 при управляющее воздействии ди меньше, чем -U.
Формирование управляющих сигналов по первому каналу 24 осуществляет-, ся следующим образом.
При управлении по грубому каналу сигнал, поступающий на вход 20 формирователя 14 сигналов управления, инвертируется инвертором 28 и идет на элемент ЗИ-НЕ 31, на выхоДе которой формируется управляющий сигнал.
Одновременно этот же сигнал инвертируется элементом 2ИЛИ-НЕ 26 и поступает на элемент 2И-НЕ 27, который запрещает форгимрование сигнала управле.ния по точному каналу.
При действии тормозного импульса, поступающего на элемент2ИЛИ-НЕ 26 и на инвертор 30, выходной сигнал с элемента 2ИЛИ-НЕ 26 приходит на элемент 2И-НЕ.27 и запрещает формирование сигнала управления по точному каналу, а инвертированный сигнал с выхода инвертора 30 поступает на вход элемента ЗН-НЕ 38 второго канала, на выходе которого формируется сигнал управления торможе-. нием.
При управЛении поточному каналу сигналы с входов 17 и 20 снимаются, и на выходе элемента 2ИЛИ-НЕ 26 формируется сигнал, разрешающий управление по точному каналу, который поступает на первый вход элемента 2И-НЕ 27, на второй вход которого приходит сигнал с входа 21 формирователя. С выхода элемента 2И-НЕ 27 сигнал поступает на инвертор 29 и на второй вход элемента ЗИ-НЕ 39 второго канала, где запрещает формирование сигналов управления во втором Канале.
Сигнал с выхода инвертора 29 поступает на элемент ЗИ-ИЕ 32 и при наличии разрешающего сигнала, поступ ающего с выхода элемента 2И-НЕ 34 второго канала, разрешает прохожде- ; ,ние на ВЕлход элемента ЗИ-НЕ 32 импульсо в,постоянно присутствующих на рходе,
19 формирователя.
С выхода элемента 3V1-HE 32 инвертированные импульсы поступают на элемент ЗИ-НЕ 31, на выходе которого формируется управляющий сигнал.
Аналогично осуществляется формирование управляющих сигналов по второму каналу 25.
Формирование одиночных импуль- сов управляемой длительности осуществляется следующим образом.
При поступлении на запускающий вход формирователя 11 одиночных импульсов управляемой длительности отрицательного перепада напряжений запускается генератор 40 линейно изменяющегося напряжения, сигнал с выхода которого поступает на второй вход компаратора 41, на первый вход которого поступает сигнал с выхода дифференцирующего узла 3. До момента запуска генератора 40 компаратор 41 находится в исходном состоянии. В момент запуска компаратор 41
срабатывает и возвращается в исходное состояние после того, как выходное напряжение генератора 40 будет равно сигналу на управляющем входе формирователя 11. На выходе компаратора 41 формируется импульс, длительность которого зависит от величины сигнала на выходе дифференциоующего узла 3.
Применение предлагаемого устройства Обеспечивает высокое быстродействие и точность,установки положения вала электродвигателя, что способству(8т повышению точности работы манипуляторов, например, в системе автоматического управления движением автомобиля на испытательном стенде. - . фм. f
t
