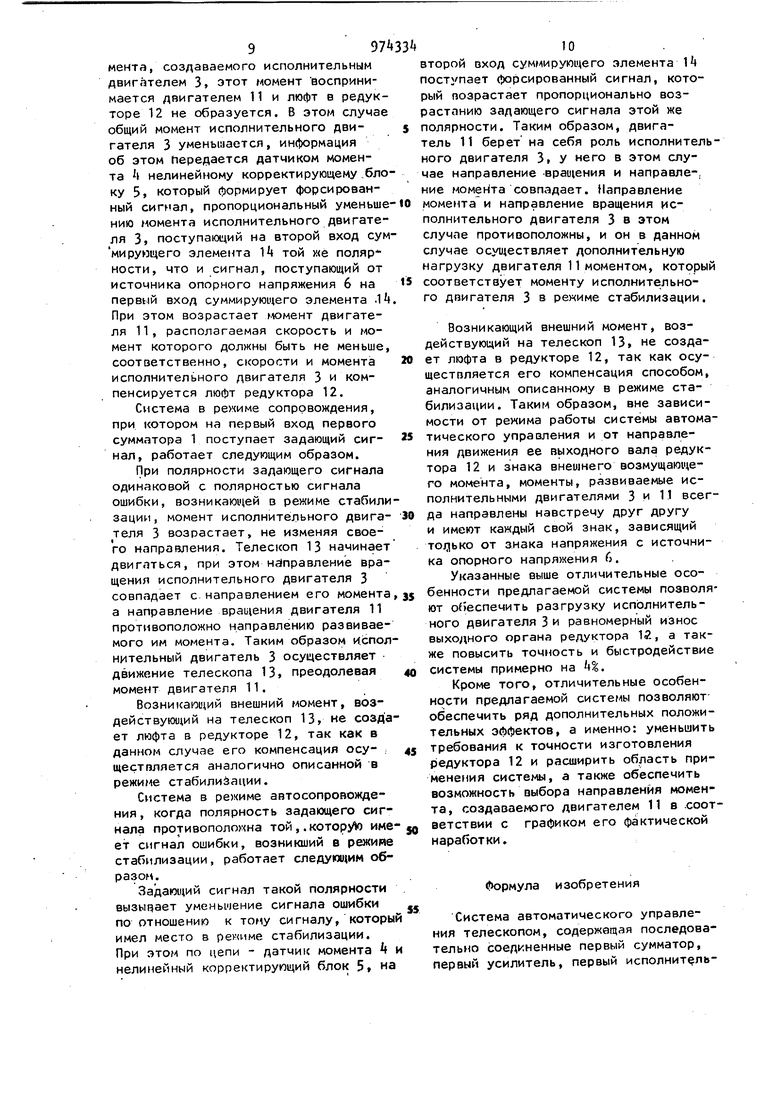
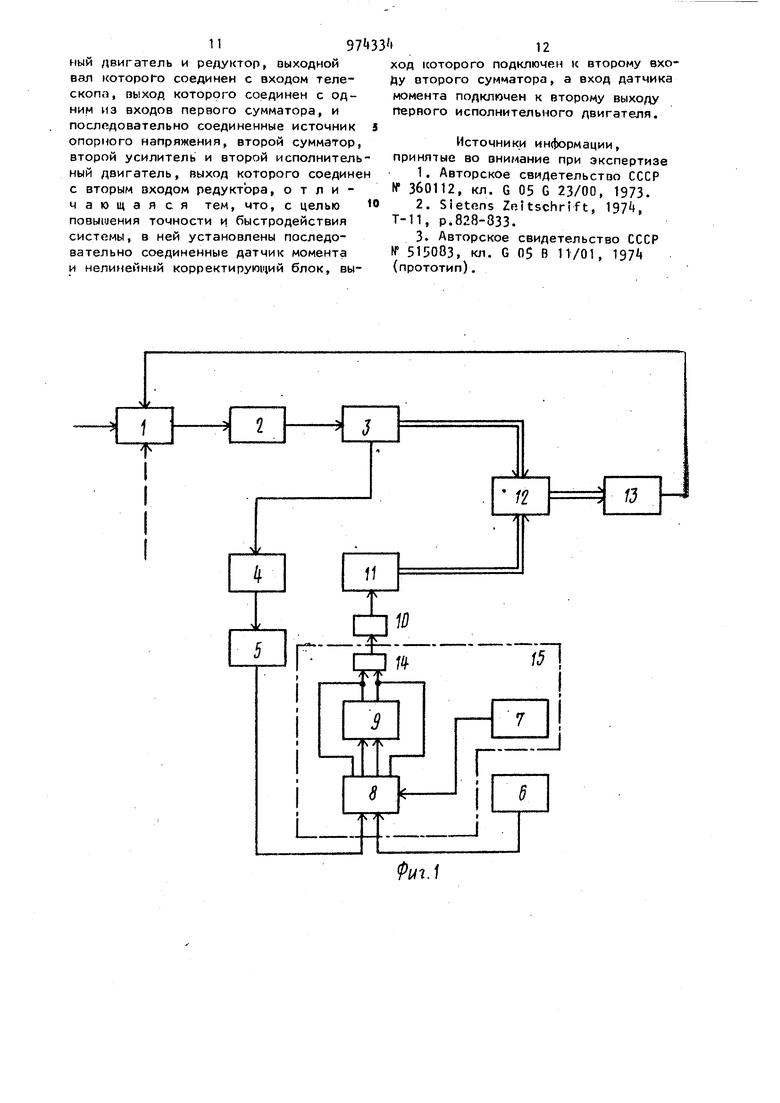
1 - , . Изобретение относится к системам автоматического управления объeKtaMH с малими углами поворота (т.е углами, меньше одного оборота выход ного вала силового редуктора ), и может быть использовано при управлении радио и оптическими телескопами, антеннами радиолокационных станций и т.д. Известна система автоматического .управления, содер)хацая измерительный редуктор, двигатель выборки механиче ких люфтов, исполнительный двигатель выход которого механически связан с нажимным винтом и первым входом измерительного редуктора, управляемый источник питания, выход которого электрически связан со входом двигателя выборки механических люфтов, пе первый вход - с выходом задатчика на пряжения покоя двигателя выборки механических люфтов, а второй вход с выходом тахогенератора, оход которого механически соединен с выходом измерительного редуктора, выход двигателя выборки механических люфтов механически соединен со вторим входом измерительного редуктора 1 . Недостатками известной cиcтe AЫ являются ее низкие точность и быстродействие. Известна также система управления телескопом с компенсацией лофта в редукторе, содержащая исполнительный двигатель (двигатели), редуктор, нагрузку, усилители, двигатель (двигатели ), создающий электромеханическую оттяжку редуктора,задатчик характеристики электромеханической редуктором и измерительный блок, на первый и вторые входы которого поступают соответственно сигналы управляющего воздействия и корректирующих обратных связей, третий вход измерительного блока электрически соединен с выходом нагрузки. 397 а выход через усилитель сигнала ошибки соединен со входом исполнительного двигателя, первый выход которого механически соединен с первым входом редуктора, второй вход редуктора ме ханически соединен с выходом двигателя, создащего электромеханическую от тяжку редуктора, а выход редуктора со входом нагрузки, первый вход усили теля канала компенсации люфта соединен с выходом задатчика характеристики электромеханической оттяжки редуктора, а выход - со входом двигателя, создающего электромеханическую оттяжку редуктора 21 В этой системе компенсация люфтов в механической передаче (редукторе) (Осуществляется с помощью введения в ; (систему управления двигателя выборки/ люфтов механической передачи, который создает принудительный натяг в элементах механической передачи. Сигналы управления на двигатель выборки люфтов механической передачи поступают от задатчика характерис тики компенсации люфта или, при другой схеме управления, от задатчика напряжения покоя (постоянного по величине и знаку) и от тахогенератора, соединенного чррез редуктор с нагруз кой. в первом случае обеспечив1ается изменение величины в элементах механической передачи { в случае редуктора - в зубьях шестерен и в эл ментах связи редуктора с объектом ре гулирования ) по сигналам от зэдатчик характеристики компенсации люфта, ко торый учитывает ожидаемо(г изменение момента на валу объекта регулирования (нагрузки ), т.е. при этом полага ют, что закон изменения моментов объекта регулирования заранее известен в процессе работы системы управления. Во втором случае, когда на вход двигателя выборки люфтов механическо передачи поступают сигнал от задатчи ка напряжения покоя ( постоянный по величине и знаку.) и сигнал от тахогенератора, измеряющего скорость исполнительногр двигателя, обеспечивается постоянство величины нажатия в элементах механической передачи. В обоих случаях исполнительный двигатель оказывается нагруженным значительным дополнительным моментом от двигателя выборки люфтов механическо передачи, что приводит к дополнительным энергетическим затратам на управление. При малых углах поворота объекта регулирования ( меньше одного оборота выходного вала редуктора) и при постоянной полярности сигнала от задатчика начальной компенсации люфта в известной системе осуществляется неравномерный односторонний износ выходных шестерен редуктора. Кроме того, когда момент, воздействующий на выход механической передачи, изменяется по сло хному закону, не учитываемому задатчиком характеристики компенсации люфта, тогда люфты в механической передаче оказываются нескомпенсированными, что приводит к уменьшению точности и быстродействия известной системы. Наиболее близкой к предлагаемой по технической сущности является система автоматического управления телескопом, содержащая последовательно соединенные первый сумматор, первый усилитель, первый исполнительный двигатель, редуктор, выходной .вал которого соединен со входом телескопа выход которого соединен с одним из входов первого сумматораj и последовательно соединенные источник опорного напряжения, второй сумматор, вюрой усилитель и второй исполнительный двигатель, выход которого соединен со вторым входом редуктора, первый вход которого через датчик скорости соединен со вторым входом второго сумматора 31. Недостатками известной системы являются ее низкие точность и быстродействие. Целью изобретения является повышение точности и быстродействия системы , Поставленная цель достигается, тем, что в системе, содержащей последовательно соединенные первый сумматор, первый усилитель, первый исполнительный двигатель и редуктор, выходной вал которого соединен со входом телескопа, выход которого соединен с одним из входов первого сумматора, и последовательно соединенные источник опорного напряжения, второй сумматор, второй усилитель и второй исполнительнь1Й двигатель, выход которого соеди|1ен со вторым входом редуктора, дополнительно установлены последовательно соединенные датчик момента и нели5Энейньй корректирующий блок, выход которого подключен ко второму входу вто рого сумматора, а вход датчика момента подключен ко второму выходу пер вого исполнительного двигателя. На фиг. 1 представлена функциональ ная схема системы; на фиг. 2 - примерное расположение шестерен в редукторе. Система автоматического управления телескопом содер) первый сумматор 1, первый усилитель 2, первый исполнительный двигатель 3, датчик момента Ц, нелинейный корректирующий блок 5, источник опорного напряжения (у, элемент управления 7 ключ 8, знакоинвертирующий элемент 9i второй усилитель 10, второй исполни тел ьнь)й двигатель 11, редуктор 12,телескоп 13 суммирующий элемент 14, второй сумматор 15, вал телескопа 16, вал первого исполнительного двигателя 17, вал второго исполнительного двигателя 18 шестерни редуктора 12, зубья шестерен 22-29, М, М ,Мд - моменты соответственно, телескопа первого и второго исполнительных двигателей, Q ,i. ,f.- скорости, соответственно, телескопа, первого и второго исполнительных двигателей. Отдельные блоки системы имеют следующее функциональное назначение. . Датчик момента h производит ное измерение усилия (момента ) исполнительного двигателя 3 по параметру, пропорциональному усилию (моменту), например, если исполнительный двигатель 3 является двигателем постоянного тока с независимым возбуждением .то косвенное измерение момента осуществляется по току якоря, если г гидродвигатель, то. - по перепаду давления и т.д. Нелинейный корректирующий блок 5 обеспечивает нелинейную монотонно убывающую зависимость своего выходного сигнала от момента на валу исполнительного двигателя 3. Например, в частном случае, величина выходного сигнала блока 5, обратно пропорциональна величине выходного сигнала датчика момента 4. Для нормального функционирования системы необходимо, чтобы выходной сигнал блока 5 равнялся нулю при максимальном моменте на валу доигателя 3Источник опорного напряжения 6 выполняет функции з.эдатчика начальной компенсации люфта, т.е. служит для обеспечения компенсации люфта при включении системы в работу, а таюхе при малых и нулевых моментах телескопа 13 и при совпадении направлений гюментов исполнительного двигателя 3 и телескопа 13. Элемент управления 7 представляет собой полуавтоматический (например, кнопочныйJ пульт с индикацией, оператор которого может осуществлять управление ключом 8 в зависимости от графика наработки механического редуктора 15, если таковой имеется. Ключ 8 - элемент электронного или релейного типа. Наряду с элементами 7 и 9 ключ 8 предназначен для выполнения подготовительных предпусковых операций. обеспечиваю1чих подачу на входы суммируодего элемента 1t положительных или отрицательных сигналов с выходов блока 5 и источника 6, что, в свою очередь, обеспечивает поло хительный или отрицательный момент Нд двигате ля 11 (т.е.. момент, воздействующий, соответственно, на зубья 22, 23, 26, 27 или , 25, 28, 29 шестерен редуктора 12 ), что необходимо для обеспечения равномерности износа зубьев шестерен редуктора. Переключение зна,ков выходных сигналов блока 5 и источника 6 может осуществляться раз в сутки, в месяц, в год и т.д. перед началом работы системы и в процессе ее работы не производится. Суммирующий элемент Ti представляет собой пропорциональное звено с двумя суммирующими (прямыми) входами, причем слагаемые на его входах имеют одинаковые знаки. Элементы 7, 8, 9 и 1 функционально входят в состав сумматора 15. Принципиально указанный сумматор 15 может иметь другойконструктивный состав. Например, он может быть реализован на дифференциальных операционных усилителях. В этом случае изменение знаков выходных сигналов блока 5 и источника 6 мо)хет осуществляться переключением указанных сигналов с прямых на инвертирующие входы операционного усилителя. Система работает следующим образом. В начале работы системы выбирается направление момента, создаваемого
797 вЗА8
двигателем 11 в соответствие с графи- равный нулю, работает следущим ком наработки редуктора 12, что не- образом.
о5хс;4имо для сбеспяче.ния равномерно Момент со знаком плюс двигатего износа выходного органа механичес- ля 11 прикладывается к выходному элекой передачи (например, выходной шее- 5 менту редуктора 12, с которым мехатерни в редукторе 1. ). Для этого с элемента управления 7 на управляющий вход ключа 8 подается управляющий сигнал, собтветствущий полученному графику наработки редуктора 12 для обеспечения выбранного направления момента двигателя 11. Ключ 8 в зависимости от значения управляющего сигнала пропускает сигналы со своего первого входа, куда подклю чем выход источника опорного напряженил б, и со своего второго входа, куда подключен выход нелинейного корректирующего блока 5, либо,COOTветственно, на первый и второй свои выходы откуда они поступают на первый и второй пходы суммирующего элемента 1, либо на третий и четвертый свои выходы, откуда ОНИ через знако-инвертирующий элемент 9 поступают на те же, первый и второй входы суммирующего элеменгга 14, с выхода которого поступает на ВХОД усилителя 1 О ,, который усиливает его по мощности. , При выполнении механической передачи в виде редуктора 12, у которого выходным элементом является зубчатая шестерня 19, выбор направления момента, создаваемого двигателем 11 выборки люфтов механической передачи, осущест вляется в тех случаях, когда выходная шестерня 19 поворачивается на углы, меньшие одного оборота. .« Предположим, что в соответствие с требованиями регламента и-графика наработки редуктора 12 подан сигнал от элемента управления 7 на управляющий вход ключа 8, такой, что выход источника опорного напряжения б подключается к первому входу, а выход нелинейного корректирующее го блока 5 - ко второму входу суммирующего элемента 1, минуя знакоинвертирующий элемент 9. В этом случае по сигналу от источника опорного напряжения 6 (постоянному по величине и знаку) исполнительный двигатель 11 создает момент со знаком плюс порядка 0,1 от номинального момента, создаваемого исполнительным двигателем 3Система в режиме стабилизации, когда на первый вход первого сумматора 1 поступает эффектный сигнал. нически связан телескоп 13, и стремится осу1нествить перемещение тедескопа 13. Информация о перемещении телескопа 13 поступает по цепи главной обратной связи (ГОС) со знаком минус на второй вход первого сумматора 1, который формирует сигнал ошибки, поступающий через усилитель 2 сигнала ошибки на вход исполнительного двигателя 3 со знаком, противоположным знаку сигнала, поступающего на первый вход суммирующего элемента Н канала компенсации люфта от источника опорного напрях ения 6. Это привоДит к тому, что исполнительный дай гатель 3 развивает момент, противополо : ный по направлению и равный по |величине моменту, создаваемому исполнительным двигателем 11 (о нашем случае со знаком минус ). Таким образом, телескоп 13 о режиме стабилизации при отсутствии моментов внешних сил находится в состоянии покоя и люфт редуктора 12 выбран. При воздействии на телескоп 13 внешнего момейта, направление которого противоположно направлению момента, создаваемого исполнительным двигателем 3, этот момент воспринима исполнительным двигателем 3 и юфт не образуется. При этом общий момент исполнительного двигателя 3 возрастает, датчик момента 4 производит косвенное измерение величины (момента) исполнительного двигателя 3 по параметру, пропорциональному усилию (моменту(например,если исполнительным двигателем является двигатель постоянного тока с независимым возбуждением, то по току якоря, если- гидродвигптель, то по перепаду давления и т.д.), но в этом случае нелинейный корректирующий блок 5, обладаюьчий обратно пропорциональной характеристикой, не передает сигнал на второй вход суммирующего элемента 14, тем самым разгружая двигатель выбора П, который в этрм случае получает сигнал только от источника опорного напряжения 6 (постоянный по величине). При воздействии на телескоп 13 внешнегр момента, направление которого -совпадает с направлением мо997
мента, создаваемого исполнительным двигателем 3, этот момент воспринимается двигателем 11 и люфт в редукторе 12 не образуется, В этом случае общий момент исполнительного двигателя 3 уменьшается, информация об этом Передается датчиком момента i нелинейному корректирующему .блоку 5, который формирует форсированный сигнал, пропорциональный уменьшению момента исполнительного двигателя 3, поступащий на второй вход суммирующего элемента 1 той поляр ности, что и сигнал, поступающий от источника опорного напряжения 6 на первый вход суммирующего элемента .1 При этом возрастает ьюмент двигателя 11, располагаемая скорость и момент которого должны быть не меньше, соответственно, скорости и момента исполнительного двигателя 3 и компенсируется люфт редуктора 12.
Система в сопровождения, при котором на первый вход первого сумматора 1 поступает задающий сигнал, работает следующим образом.
При полярности задающего сигнала одинаковой с полярностью сигнала ошибки, возникаю1цей в режиме стабилизации, момент исполнительного двигателя 3 возрастает, не изменяя своего направления. Телескоп 13 начинает двигаться, при этом направление вращения исполнительного двигателя 3 совпадает с направлением его момента, а направление вращения двигателя 11 противоположно направлению развиваемого им момента. Таким образом Исполнительный двигатель 3 осуществляет движение телескопа 13, преодолевая момент двигателя 11.
Возникающий внешний момент, воздействуюи1ий на телескоп 13, не создает люфта в редукторе 12, так как в данном случае его компенсация осу- , щестпляется аналогично описанной в режиме стабилизации.
Система в режиме автосопровождения , когда полярность задающего сигнала противополомна той ,. которуУ) имеет сигнал ошибки, возникший в режиме стабилизации, работает следующим образом.
Задающий сигнал такой полярности вызывает уменьшение сигнала ошибки по отношению к тому сигналу, который имел место в режиме стабилизации. При этом по цепи - датчик момента и нелинейный корректирующий блок 5, на
10
второй вход суммирующего элемента 1 поступает форсированный сигнал, который возрастает пропорционально возрастанию задающего сигнала этой же полярности. Таким образом, двигатель 11 берет на себя роль исполнителного двигателя 3 У него в этом случае направление вращения и направле-, ние момеИта совпадает. Направление момента и направление вращения исполнительного двигателя 3 в этом случае противоположны, и он в данном случае осуществляет дополнительную нагрузку двигателя 11 моментом, которы соответствует моменту исполнительного двигателя 3 в режиме стабилизации.
Возникающий внешний момент, воздействующий на телескоп 13, не создает люфта в редукторе 12, так как осуществляется его компенсация способом, аналогичным описанному в режиме стабилизации. Таким образом, вне зависимости от режима работы системы автоматического управления и от направления движения ее выходного вала редуктора 12 и знака внешнего возмущающего момента, моменты, развиваемые исполнительными двигателями 3 И 11 всегда направлены навстречу друг другу и имеют каждый свой знак, зависящий от знака напряжения с источника опорного напряжения 6.
Указанные выше отличительные особенности предлагаемой системы позволяют обеспечить разгрузку исполнительного двигателя 3 и равномерный износ выходного органа редуктора 12, а также повысить точность и быстродействие системы примерно на «.
Кроме того, отличительные особенности предлагаемой системы позволяютобеспечить ряд дополнительных положительных эффектов, а именно: уменьшить требования к точности изготовления редуктора 12 и расширить область применения системы, а также обеспечить возможность выбора направления момента, создаваемого двигателем 11 в .соответствии с графиком его фактической наработки.
«Формула изобретения
Система автоматического управления телескопом, содержвщая последовательно соединенные первый сумматор, первый усилитель, первый исполнительный двигатель и редуктор, выходной вал котороГ-о соединен с входом телескопа, выход которого соединен с одним из входов первого сумматора, и последовательно соединенные источник опорного напряжения, второй сумматор, второй усилитель и второй исполнитель ный двигатель, выход которого соедине с вторым входом редуктора, отличающаяся тем, что, с целью повышения точности и быстродействия системы, в ней установлены последовательно соединенные датчик момента и нелинейный корректирую1ций блок, вы97t ход которого подключен к второму входу второго сумматора, а вход датчика момента подключен к второму выходу перного исполнительного двигателя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 360112, кл. G 05 G 23/00, 1973. 2.Sietens Zeitschrift, 197. Т-11, р.828-833. 3.Авторское свидетельство СССР № 515003, Ю1. G 05 В 11/01, 197 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящая система | 1987 |
|
SU1464138A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Устройство для управления приводом | 1986 |
|
SU1381422A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| Способ и устройство выборки люфта в кинематической передаче опорно-поворотного устройства с двумя взаимосвязанными электроприводами | 2019 |
|
RU2726951C1 |
| Следящая система с люфтом | 1981 |
|
SU1012194A1 |
| Комбинированная следящая система | 1982 |
|
SU1023276A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
hl.i
