(5) ЦИФРОВОЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| ЦИФРОВОЙ ДАТЧИК УГЛА С ЦИФРОВОЙ КОРРЕКЦИЕЙ ПОГРЕШНОСТИ | 2014 |
|
RU2554561C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ | 1990 |
|
RU2018142C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 2007 |
|
RU2352060C1 |
| Устройство для управления следящим приводом | 1987 |
|
SU1442975A1 |
| Зондирующее устройство для измерения гидрофизических параметров водной среды | 1985 |
|
SU1287085A1 |
| Устройство для сбора телеметрической информации | 1987 |
|
SU1566399A1 |
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
I
Изобретение относится к автомати|Ке и вычислительной технике и может быть использовано при управлении перемещениями механизмов, например станков и других механизмов с числовым программным управлением.
Статическая и динамическая точность регулирования перемещения в прецизионных механизмах обеспечивается не только качественным выполнением канала обратной связи по перемещению, но и высоким качеством канала обратной связи по скорости перемещения.
Известно устройство с применением преобразования сигнала датчика скорости в цифровую форму 1.
Однако это преобразование осуществляется одним устройством во всем диапазоне регулирования скорости, так что несмотря на исключение остальных аналоговых устройств из контура регулирования суммарная погрешность устройства велика.
Наиболее близким по технической сущности к предлагаемому является цифровой следящий привод, содержащий последовательно соединенные вычислитель , преобразователь код-аналог, усилитель, двигатель, датчик перемещения, преобразователь пере-, мещение-код, выход которого соединен с первым входом вычислителя,, и соединенный с двигателем аналоговый датчик скорости
Недостатком устройства является низкая точность регулирования скорости устройства, вызванная погрешностями аналогового контура регулирования скорости и применением коррекции посредством переключения аналоговых элементов в блоке изменения коэффициента связи.
Цель изобретения - повышение точности цифрового следящего привода.,
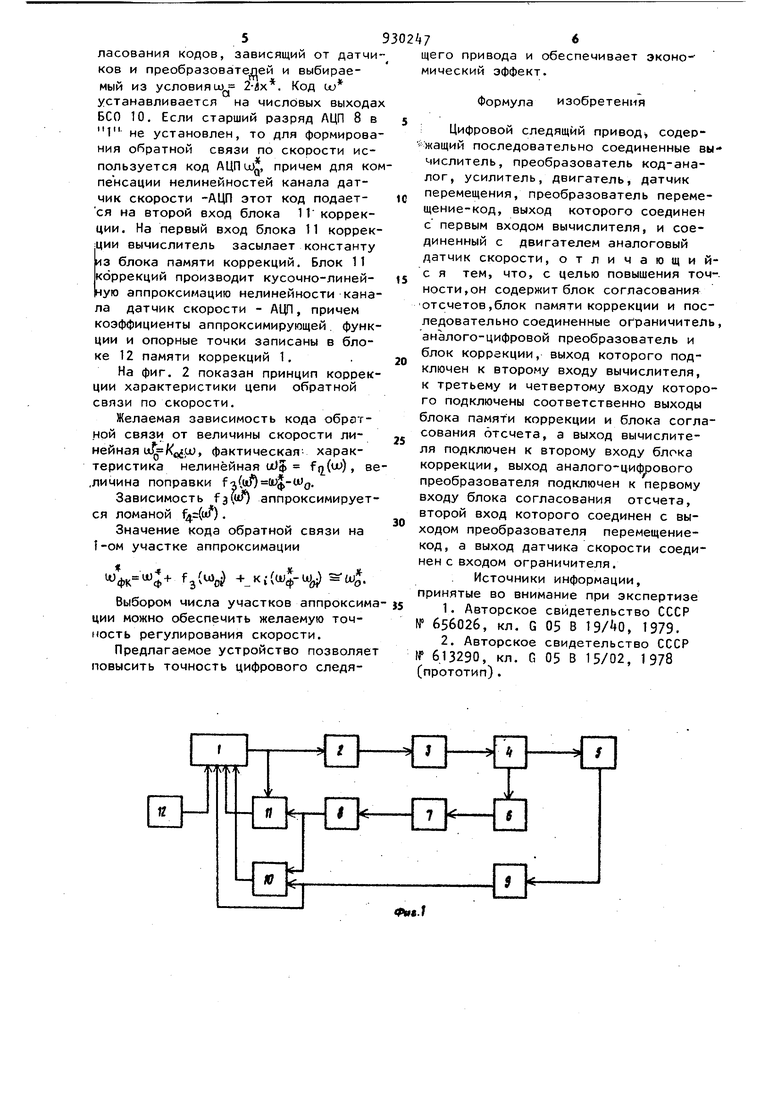
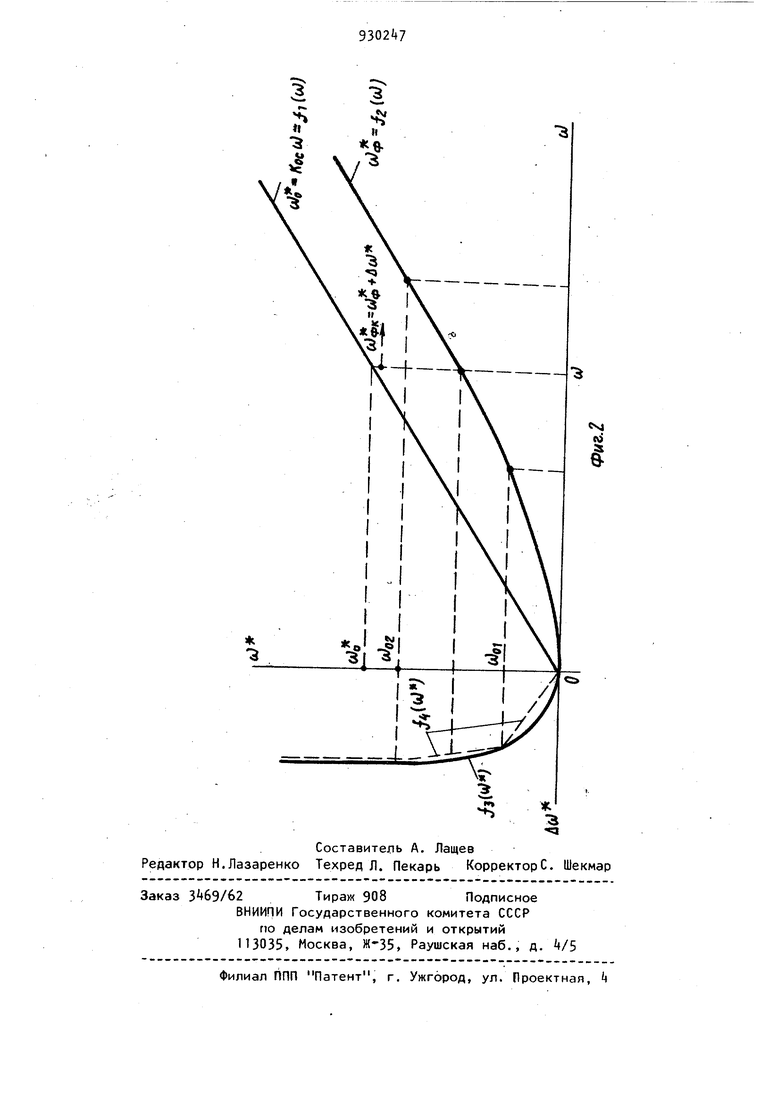
Эта цель достигается тем, что регулятор содержит блок согласования отсчетов, блок памяти коррекции и 39 последовательно соединенные огранич тель, аналого-цифровой преобразователь и блок коррекции, выход которого подклюмен к второму входу вычи лителя, к третьему и четвертому входу которого подключены соответственно выходы блока памяти коррекции и блока согласованияотсчета, а выход вычислителя подключен к второму входу блока коррекции, выход аналого-цифрового преобразователя подключен к первому входу блока согласования отсчета, второй вход которого соединен с выходом преобразова теля перемещение-код, а выход датчика скорости соединен с входом огр ничителя. На фиг. I приведена блок-схема цифрового следящего привода,; на фиг. 2- коррекция характеристики це пи обратной связи по скорости. Привод содержит последовательно соединенные вычислитель 1, преобразователь код-аналог усилитель 3, дви гатель Ц, датчик 5 перемещения, аналоговый датчик 6 скорости, соединенный с валом двиготеля 1} , и последовательно соединенные с датчи ком скорости 6 ограничитель 7 сигнала датчика и аналого-Цифровой преобразователь (АЦП) 8, преобразователь перемещение-код (ППК) 9, соединенный с датчиком Ь перемещения. Выходы преобразователя перемещение-код 9 и аналого-цифрово го преобразователя 8 подключены к входам блока согласования отсчетов (БСО) 10, аналого-цифровой преобразо ватель 8 соединен с блоком 11 коррек ции сигнала скорости, который,в свою очередь, соединен с вычислителем 1. Постоянные, определяющие величину коррекций сигнала скорости, записаны в блок 12 памяти коррекций, соединенный с вычислителем 1. Устройство работает следующим образом. В вычислителе 1 сигнал приращения заданного перемещения лх сравнивается с цифровым сигналом приращения фактического перемещения Дх с выхода ппеобразователя перемещение-код 9. Сигнал ошибки в I-OM цикле перемещения« )( / -и . .,-f (). где &|,., - суммарный сигнал ошибки з предыдущие циклы перемещения, испол зуется для формирования цифрового кода заданной скорости перемещения в виде зг ыр-е +с- х игде , к - коэффициенты передачи канала перемещения и канала компенсации скоростного рассогласования соответственно. Сигнал ои сравнивается с сигналом фактической скорости w, который в зависимости от уровня скорости может поступать с выхода БСО 10 (BI этом случае Ю дх ) или же с выхода блока 11 коррекций (формирование этого сигнала рассмотрено ниже). Код ошибки скорости . (А)Л- -OU. преобразуется в вычислителе 1 в сигнал регулятора скорости, который с выхода вычислителя поступает на вход преобразователя код- аналог 2 и далее через усилитель 3 мощности на двигатель 4, скорость которого в установившемся режиме пропорциональна этому сигналу. Скорость двигатепя (X) измеряется в предлагаемом устрой стве двумя способами. Сигнал аналогового датчика 6 скорости пропорционален скорости двигателя k, если эта скорость ниже уровня ограничителя 7.Этот сигнал преобразуется в цифровой код OU0 в аналого-цифровом преобразователе 8. Приращение кода на выходе преобразователя перемещеНие-код 9 также пропорционально скорости ио , именно дх ent( , где N - число дискрет датчика 5 перемещения на 2Jf электрических радиан; ш- скорость датчика перемещения. Ту,- период измерения, причем дх тем точнее соответствует измеряемой скорости U) , чем больше знамение ио. В предлагаемом устройстве точность регулирования скорости повышена как раз за счет использования каждого из сигналов выхода АЦП 8и и ППК 9 ДХ для регулирования скорости в своем диапазоне.Для этого служит блок согласования отсчетов 10. В этом 5локе анализируется старший разряд 0)0 и, если он установлен в 1, т.е., если с,корость uJ близка к верхней границе диапазона низких скоростей, то переходим на обратную свпзь,. использующую код скорости с ППК 9 ijO 2 -х , где 2 - коэффициент согласования кодов, зависящий от датчи ков и преобразователей и выбираемый из условияu) 2-йх. Код LO устанавливается на числовых выходах БСО 10. Если старший разряд АЦП 8 в 1 не установлен, то для формирова ния обратной связи по скорости используется код АЦПи, причем для ко пенсации нелинейностей канала датчик скорости -АЦП этот код подается на второй вход блока 1 Г коррекции. На первый вход блока 11 коррекции вычислитель засылает константу лз блока памяти коррекций. Блок 11 коррекций производит кусочно-линей- ую аппроксимацию нелинейности канала датчик скорости - АЦП, причем коэффициенты аппроксимирующей. функции и опорные точки записаны в блоке 12 памяти коррекций 1. . На фиг. 2 показан принцип коррекции характеристики цепи обратной связи по скорости. Желаемая зависимость кода обратной связи от величины скорости линейная , фактическая характеристика нелинейная и)ф f ij(u)), ве .личина поправки fз( 3aвиcимocть f3 аппроксимируется ломаной 1(оо). Значение кода обратной связи на 1-ом участке аппроксимации фк Выбором числа участков аппроксима ции можно обеспечить желаемую точность регулирования скорости. Предлагаемое устройство позволяет повысить точность цифрового следящего привода и обеспечивает эконо- мический эффект. Формула изобретения i Цифровой следящий привод содер-жащий последовательно соединенные вычислитель, преобразователь код-аналог, усилитель, двигатель, датчик перемещения, преобразователь перемещение-код, выход которого соединен с первым входом вычислителя, и соединенный с двигателем аналоговый датчик скорости, отличающийс я тем, что, с целью повышения точности, он содержит блок согласования Отсчетов,блок памяти коррекции и последовательно соединенные ограничитель, аналого-цифровой преобразователь и блок коррекции, выход которого подключен к второму входу вычислителя, к третьему и четвертому входу которого подключены соответственно выходы блока памяти коррекции и блока согласования отсчета, а выход вычислителя подключен к второму входу блока коррекции, выход аналого-цифрового преобразователя подключен к первому входу блока согласования отсчета, второй вход которого соединен с выходом преобразователя перемещениекод, а выход датчика скорости соединен с входом ограничителя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 656026, кл. G 05 В , 1979. 2.Авторское свидетельство СССР ff 6,13290, кл. G 05 В 15/02, 1978 (прототип).
