(5) ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ТЕМПЕРАТУРЫ | 1973 |
|
SU365587A1 |
| Пневматический датчик | 1959 |
|
SU127875A1 |
| УСТРОЙСТВО для ПОВЕРКИ ПНЕВМАТИЧЕСКИХ ДАТЧИКОВДАВЛЕНИЯ | 1971 |
|
SU315971A1 |
| Способ изменения коэффициента усиления пневматического рычажного регулятора системы котельной автоматики | 1980 |
|
SU937869A1 |
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОЙ ПОВЕРКИ | 1971 |
|
SU301993A1 |
| Пневматический позиционный регулятор | 1979 |
|
SU903806A1 |
| Пневматический измерительный преобразователь теплотехнического параметра | 1973 |
|
SU508123A1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР | 2021 |
|
RU2768105C1 |
| ТЕРМОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2017200C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2021 |
|
RU2768104C1 |
I
Изобретение х)тносится к автоматическому управлению и может.быть применено в системах пневмоавтоматики.
Известны пневматические регуляторы, построенные по принципу силового суммирования входного и выходного сигналов ГП.
Наиболее близким по технической сущности к предлагаемому устройству является пневматический регулятор, содержащий рычаг с пружиной задания, сильфоном-датчиком и двумя сильфонами обратных связей, один из которых непосредственно, а второй через инерционное звено соединены с выходом усилителя, вход которого соединен с соплом, взаимодействующим с заслонкой, закрепленной на рычагеt2}
Недостатком известного регулятора является наличие статической погрешности, обусловливающей отклонение установившегося значения регулируемой величины от заданного значения при
различных значениях выходного сигнала. Указанная погрешность вызвана действием силы сопротивления, складывающейся из реакций упругих элементов и струи воздуха сопла, возникающих при перемещении рычажной системы на величину, определяемую ходом заслонки относительно сопла.
Цель изобретения - уменьшение статической погрешности регулятора.
Указанная цель достигается тем, что пневматический регулятор, содержащий рычаг с пружиной задания, сильфоном-датчиком и двумя сильфонами обратных связей, один из которых непосредственно, а второй через инерционное звено соединены с выходом усилителя, вход которого соединен с соплом, заслонка которого закреплена на рычаге, на сопле установлен магнит, а заслонка выполнена из магнитотвердого материала.
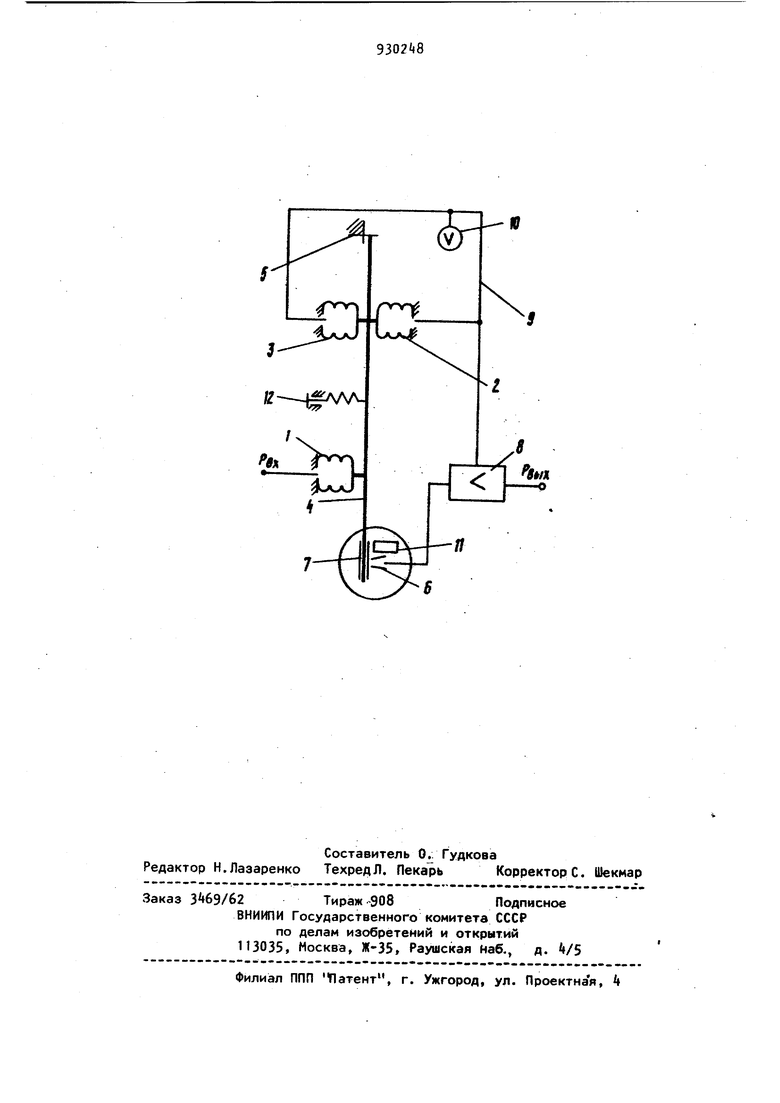
Указанные конструктивные особенности позволяют развить на рычаге 393 дополнительную силу, компенсирующую статическую погрешность в работе рег лятора, На чертеже представлена схема пре лагаемого регулятора, Регулятор содержит сильфон-датчик 1, сильфон 2 отрицательной обратной связи, сильфон 3 положительной обрат ной связи, рычаг , вращающийся относительно опоры 5- С рычажной систе мой соединен индикатор рассогласования, состоящий из сопла 6 и заслонки 7Усилитель 8 предназначен для усиления выходного сигнала регулятора, Для получения интегральной составляющей в цепи положительнор1 обратной связи установлено инерционное звено состоящее из дросселя 9 и емкости 10 Регулятор содержит, также магнит 11, связанный с соплом и установленный с возможностью перемещения вдоль оси сопла, и пружину 12. Регулятор работает следующим образом. При увеличении входного сигнала Pgj( рычаг k поворачивается относительно опоры 5 против часовой стрелки. При этом заслонка 7 приближается к соплу 6. Давление на выходе Рду увеличивается. Это давление поступает в сильфон 2 отрицательной обратной связи и через дроссель 9 и емкость 10 в сильфон 3 положительной обратной связи. Использование положительной обратной связи обеспечивает введение в закон регулирования интегральной составляющей. В статическом режиме результирующее усилие сильфонов обратной связи равно нулю. При этом усилие сильфона-датчика 1.компенсируется усилием натяга пружины 12 установки задания. При минимальной нагрузке сигнал на выходе регулятора минимален. При этом рычаг находится в крайнем левом положении. При возрастании нагрузки выходной сигнал регулятора увеличивается и при максимальной нагрузке становится максимальным. Рычаг при этом находится в крайнем правом положении. При этом возникает сила сопротивления, складывающаяся из сил реакций упругих элементов при деформациях, являющихся следствием перемещения рычага, и силы реакции струи воздуха сопла на заслонку. Компенсация указанных сил обеспечивается силой взаимодействия магнита и заслонки. Эта сила направлена встречно действию сил реакций и- компенсирует их. Необходимая величина силы магнитного взаимодействия устанавливается перемещением магнита вдоль оси сопла. Экономический эффект от внедрения предлагаемого изобретения достигается за счет повышения точности стабилизации регулируемой величины. Формула изобретения Пневматический регулятор, содержащий рычаг с пружиной задания, силь.фоном-датчиком и двумя сильфонами обратных связей, один из которых непосредственно а другой через инерционное звено соединены с выходом усилителя, вход которого соединен с соплом, заслонка которого закреплена на рычаге, отличающийся тем, что, с целью уменьшения оптической погрешности, на сопле установлен магнит, а заслонка выполнена из магнитотвердого материала. Источники информации, принятые во внимание при экспертизе 1.Моль Р. Гидропневмоавтоматика.. М., Машиностроени е, 1975, с.358. 2.Корнилов Ю. Г. Элементы и системы пневмоавтоматики. Киев, Техника, 1968, с. 2 (прототип).
(fwv
