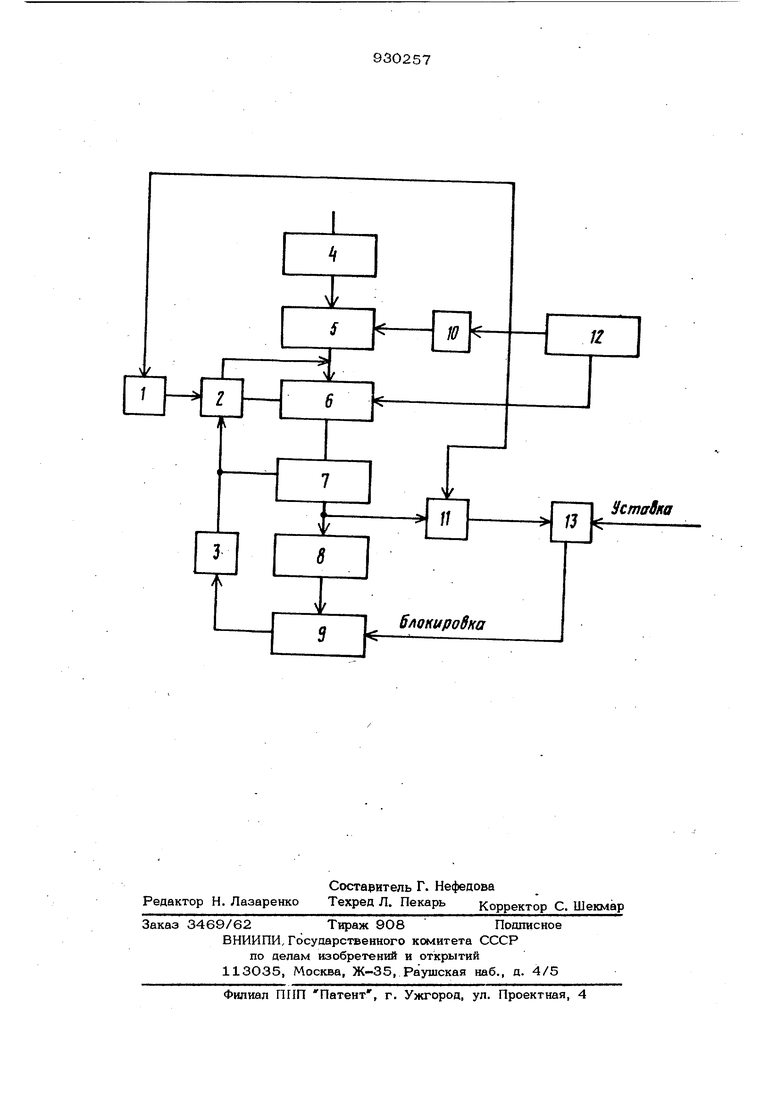
Изобретение относится к области робототехники и может быть использснзано при создании промышленных роботов с программным управлением. Известно устройство для программного управления промышленным роботом, содержащее блок памяти, пульт обучения, блок сравнения, цифро-аналоговый преобразователь, привод и датчик положения 1 Однако это устройство имеет сложный процесс программирования. Наиболее близким по технической сущ:ности к изобретению является устройство , содержащее пульт обучения, блок памяти и последовательно соединенные первый блок сравнения, цифро-аналоговый преобразователь, привод и датчик положения, выход которого подключен к пернвому входу первого блока сравнения 2J. Недостатками этого устройства явля1Ьтся смещение положения манипулятора, имеющего несамотормозящийся привод под действием груза и смещенного центра тяжести в режиме обучения, а также труд ность контроля работы измерительного канала перед началом работы манипулятора, что не обеспечивает точности обучения и проверку измерительного канала перед включением маштулятора. Цель изобретения - расширение функциональных возможностей устройства. Цель достигается тем, что устройство содержит одновибратор, ключ, последовательно соединенные инвертор, второй ключ и реверсивный счетчик, а также последовательно подключенные третий ключ и второй блок сравнения, второй вход которого соединен с входом -устройства, а выход - с вторым входом привода, первый .выход пульта обучения подключен к первому входу третьего ключа и входам инвертора и одновибратора, выходом соединенного с первым входом первого ключа, второй вход которого подключен к выходу датшка положения, а выход - к первому входу реверсивного счетчика, входом соединенного с вторым выходом пульта обучения, а выходсм - с вторым входом первого блока сравнения, выход которого подклк чен к второму входу третьего ключа, а выход блока памяти соединен с вторым входом второго ключа. На чертеже представлена функииональ ная схема устройства. Устройство содержит одновибратор 1, первый ключ 2, датчик 3 положения, блок 4 памяти, второй ключ 5, реверьсивный счетчик 6, первый блок 7 сравне ния, цифро-аналоговый преобразователь 8 привод 9, инвертор 10, третий ключ 11, пульт 12 обучения, второй блок 13 срав нения. Устройство работает следующим образом. В режиме обучения выдается управляющий сигнал с пульта 12 обучения на И1тертор 10, третий ключ 11, одновибратор 1. Второй ключ 5 закрывается и информация с блока памяти не поступает на реверсивный счетчик б. Импульсом, сформированным одновибратором 1, информация с датчика 3 положения через ключ 2 заносится в реверсивный счетчик 6, С выхода реверсивного счетчика 6 информация о положении манипулятора поступает на один из входов блока 7 сра нения, а на другой вход его поступает информация от датчика 3 положения. Сиг нал ощибки с блока 7 поступает, на вход цифро-аналогового преобразователя 8 и через открытый ключ 11 на вход блока 13 сравнения. Цифро-аналоговым преобразователем 8 этот сигнал, преобразуется в аналоговый и поступает на вход привода 9, который возйействует на датчик 3 положения. Блок 13 сравнения при превышении кода уставки отключает привод 9 координаты манипулятора. Перемещение манипулятора производится путем подачи импульсов с пуль/та .12 обучения на счетные, входы реверсивного счетчика б в за4исимости от выбранного направления движения. Применение изобретения позволит ж пользовать в качестве приводов квадранты, следящие золотники и электроприводы, имеющие дрейф, а также приводы. nocTpoeHtJbie на шарико-винтовых парах, которые имеют более высокий КПД, по сравнению с существующими, или отказаться от электротормозов, которые обеспечивает фиксацию положения манипулятора после снятия управляющего воздействия на привод. Формула изобретени Устройство для программного управления промышленным роботом, содержащее пульт обучения, блок памяти и последоватепьно соединенные первый блок сравнения, ци({ро-аналоговый преобразователь, привод и датчик положения, выход которого подключен к первому входу первого блока сравнения, отличаю щеес я тем, что, с целью расширения функциональных возможностей устройства, оно содержит одновибратор, первый ключ, последовательно соединенные инвертор, второй ключ и реверсивный счетчик, а также последовательно подключенные третий ключ и второй блок сравнения, второй вход которого соединен с входом устройства, а выход - с вторым входом привода, первый выход пульта обучения подключен к первому входу третьего ключа и входам инвертора и одновибратора, выходом соединенного с первым входом первого ключа, второй вход которого подключен к выходу Датчика положения, а выход - к первому входу реверсивного счетчика, вторым входом соединенного с вторым выходом пульта обучения, а выходом - с вторым входом первого блока сравнения, выход которого подключен к второму входу третьего ключа, а выход блока памяти соединен с вторым входом второго ключа. Источники информации, принятые во внимание при экспертизе 1.Белянин П, Н. Промышленные роботы. М., Машиностроение, 1975, с. 228231. 2.Устройство числового программного управления УПМ-552 и УПМ-772 . Техническое описание (прототип).
10
и
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| Устройство для программного управления промышленным роботом | 1980 |
|
SU894675A1 |
| Система программного управления для робота-манипулятора | 1977 |
|
SU713682A1 |
| Система программного управления для робота-манипулятора | 1978 |
|
SU744456A1 |
| Устройство для профессионального отбора операторов | 1990 |
|
SU1714656A1 |
| Устройство для позиционного управления роботом-манипулятором | 1976 |
|
SU636076A1 |
| Устройство для оценки профессиональной пригодности радиотелеграфистов | 1983 |
|
SU1101874A1 |
| Устройство для программного управления | 1981 |
|
SU987579A1 |
| Тренажер радиотелеграфиста | 1984 |
|
SU1259327A1 |
| Устройство для управления транспортным роботом | 1985 |
|
SU1247838A1 |
f
Устувяа
/f
/J
блокировка
