1
Изобретение относится к области программного управления многокоординатными устройствами и может быть использовано для управления движениями рабочего органа промышленного робота, например при точечной сварке.
Известная система программного управления роботами-манипуляторами, содержаш,ая штеккерный барабан, узлы сравнения, приводы, датчики положений, блок цифровой индикации и цифро-печатающий блок 1, имеет низкую точность, а процесс обучения ее сложен.
Наиболее близким техническим решением к данному изобретению является система 2, содержащая последовательно соединенные блок ручного управления, управляемый генератор, блок каммутации, шаговый привод и исполнительный орган и элемент И, выход которого подключен к первому входу реверсивного счетчика и ко входу блока памяти, выход блока памяти соединен со вторым входом блока коммутации, второй выход которого подключен ко второму входу реверсивного счетчика, а третий выход - к первому входу элемента И.
Эта система обладает низкими точностью и быстродействием нз-за колебаний рабочего органа при позиционировании, так как при выполнении точечной сварки сварочный инструмент необ.ходимо перемеш,афь с частотой 60 точек в минуту и выше. Приводы при этом работают в тяжелом старт-стопном режиме, а наибольшее влияние на качество переходного процесса оказывает исполнительный орган, представляющий собой колебательное звено второго порядка с довольно большими величинами постоянных времени.
Целью изобретения является повышение точности и быстродействия системы. Это достигается тем, что предлагаемая система
содержит блок эталонного сигнала и последовательно соединенные цифроаналоговый преобразователь, нуль-орган, блок запоминания амплитуды и регулируемый усилитель, выход которого подключен ко второму входу управляемого генератора, а второй вход
к выходу блока эталонного сигнала, вход цифроаналогового преобразователя соединен с выходом реверсивного счетчика, а второй его выход - со входом блока запоминания амплитуды, выход нуль-органа подключен ко второму входу .схемы совпадения.
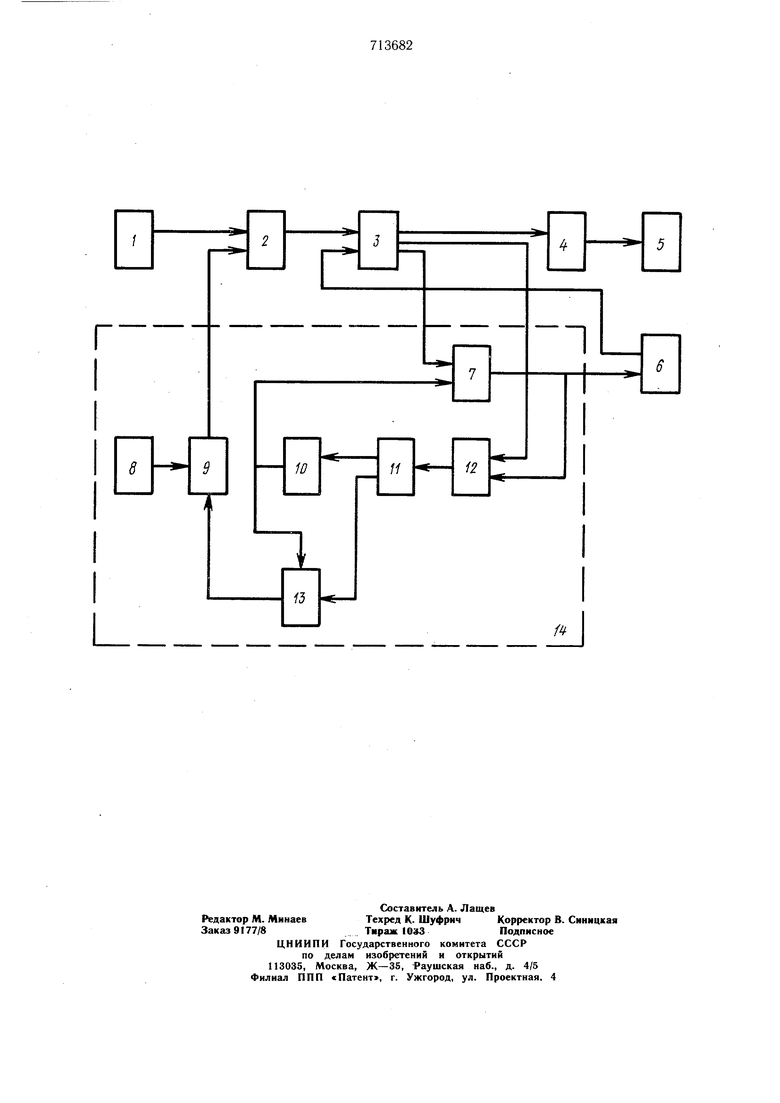
На чертеже показана блок-схема системы программного управления роботом-манипулятором, на котором указаны блок 1 ручного управления, управляемый генератор 2, блок 3 коммутации, шаговый привод 4, исполнительный орган 5, блок б памяти, элемент 7 И, блок 8 эталонного сигнала, регулируемый усилитель 9, нуль-орган 10, цифроаналоговый преобразователь 11, реверсивный счетчик 12, блок 13 запоминания амплитуды, блок 14 обучения.
Система работает следующим образом.
В процессе обучения оператор, воздействуя на рукоятку блока 1 ручного управления перемещает исполнительный орган 5 в необходимую точку пространства, при этом импульсы с генератора 2 поступают одновременно на привод 4 и реверсивный счетчик 12, где происходит алгебраическое суммирование информации о координатных перемещениях. Величины покоординатных перемещений, зафиксированные в реверсивном счетчике 12, через цифроаналоговый преобразователь II, поступают на блок 13 запоминания амплитуды, который подключен к регулируе.мому усилителю 9, и устанавливают на нем коэффициент усиления, пропорциональный величине перемещения, зафиксированной в счетчике 12. Сигналы нуль-органа 10, подключенного к цифроаналоговому преобразователю II, поступают на один из входов элемента 7 И.
Информацию из блока 14 обучения можно переносить в блок 6 памяти, в качестве носителя информации в котором может быть использована магнитная лента. Оператор, нажав кнопку запускает блок 8 эталонного сигнала. Этот блок вырабатывает сигналы оптимального перемещения от точки к точке по каждой координате, которые поступают на усилитель 9, а затем на управляемый генератор 2. Последний вырабатывает импульсы с частотой, пропорциональной сигналу, поступающему на его вход, которые через блок 3 коммутации, элемент 7 И поступают в блок 6 памяти. Одновременно эти импульсы поступают на вычитающий вход реверсивного счетчика 12. После того, как вся информация о перемещении исполнительного органа 5 из точки в точку вычтется из реверсивного счетчика, нуль-орган 10 закроет элемент 7 И. Одновременно нуль-орган 10 сбросит на нуль блок 13 запоминания амплитуды. После этого ведут программирование перемещений до следующих точек. В автоматическом режиме блок 14 обучения отключается и программа с блока 6 памяти поступает через блок 3 коммутации на приводы 4, перемещая исполнительный орган 5 по подготовленной программе.
В эксплуатации робот-манипулятор комплектуется системами по количеству его степеней подвижности, и блок обучения при этом может быть выполнен в виде отдельного узла для одного робота или целой группы роботов.
Применение изобретения позволит получить, производительность до 100 точек в минуту, тогда как производительность современных зарубежных образцов роботов составляет до 50 точек в минуту.
Формула изобретения
С ЛГ
истема программного управления для робота-манипулятора, содержащая последовательно соединенные блок ручного управления, управляемый генератор, блок коммутации, щаговый привод и исполнительный орган, и элемент И, выход которого подключен к первому входу реверсивного счетчика и ко входу блока памяти, выход блока памяти соединен со вторым входом блока коммутации, второй выход которого подключен ко второму входу реверсивного счетчика, а третий выход - к первому входу элемента И, отличающаяся тем, что, с целью повышения точности и быстродействия, система содержит блок эталонного сигнала и последовательно соединенные цифроаналоговый преобразователь, нуль-орган, блок запоминания амплитуды и регулируемый усилитель, выход которого подключен ко второму входу управляемого генератора, а второй входк выходу блока эталонного сигнала, вход цифроаналогового преобразователя соединен с выходом реверсивного счетчика, а второй выход - со входом блока запоминания амплитуды, а выход нуль-органа подключен ко второму входу элемента И. Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 377230, кл. В 25 J 9/00, 02.10.71.
2.Авторское свидетельство СССР
№ 541147, кл. G 05 В 19/42, 11.02.72 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система программного управления роботом-манипулятором | 1979 |
|
SU943644A1 |
| Система программного управления для робота-манипулятора | 1978 |
|
SU744456A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| ЦИФРОВОЙ СИНТЕЗАТОР ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2001 |
|
RU2204197C2 |
| Цифровой генератор трехфазных синусоидальных сигналов | 1990 |
|
SU1797732A3 |
| СИНТЕЗАТОР С V-ОБРАЗНЫМ ЗАКОНОМ МОДУЛЯЦИИ ЧАСТОТЫ | 2009 |
|
RU2407144C1 |
| ЦИФРОВОЙ ВЫЧИСЛИТЕЛЬНЫЙ СИНТЕЗАТОР | 2005 |
|
RU2286645C1 |
| УСТРОЙСТВО ДЛЯ СПЕКТРАЛЬНОГО АНАЛИЗА | 1991 |
|
RU2011966C1 |
| Устройство для автоматического контроля больших интегральных схем | 1986 |
|
SU1529220A1 |