1
Изобретение относится к области робототехники и может быть использовано при создании систем управления сварочными роботами-манипуляторами.
Известна система программного управления для робота-манипулятора, содержащая реверсивный счетчик, цифровой умножитель, вычислительную машину, усилители и приводы исполнительного органа 1.
Такая система является сложной, имеет низкую скорость записи и не обеспечивает контурного управления.
Наиболее близким техническим решением к изобретению является система, содержащая последовательно соединенные блок ручного управления, управляемый генератор, блок коммутации, привод и исполнительный орган, последовательно соединенные элемент И, реверсивный счетчик, цифро-аналоговый преобразователь, нуль-орган, первый блок памяти и регулируемый усилитель, выход которого подключен к второму входу управляемого генератора, второй выход блока коммутации соединен со вторым входом реверсивного счетчика, а третий выход - со вторым входом элемента И, второй вход которого -подключен к выходу нуль-органа, а выход - к входу второго блока памяти, выход которого соединен со вторым входом блока коммутации, 2.
Недостатком такой системы является невозможность поддержания постоянства тре5 буемой контурной скорости перемещения исполнительного органа в интервалах между программируемыми точками, что снижает его функциональные возможности. Целью изобретения является расширение
10 функциональных возможностей системы.
Сущность изобретения заключается в том, что система содержит последовательно соединенные блок коррекции скорости и блок задания скорости, выход которого подключен ко второму входу регулируемого усилителя, выход которого соединен с входом блока коррекции скорости.
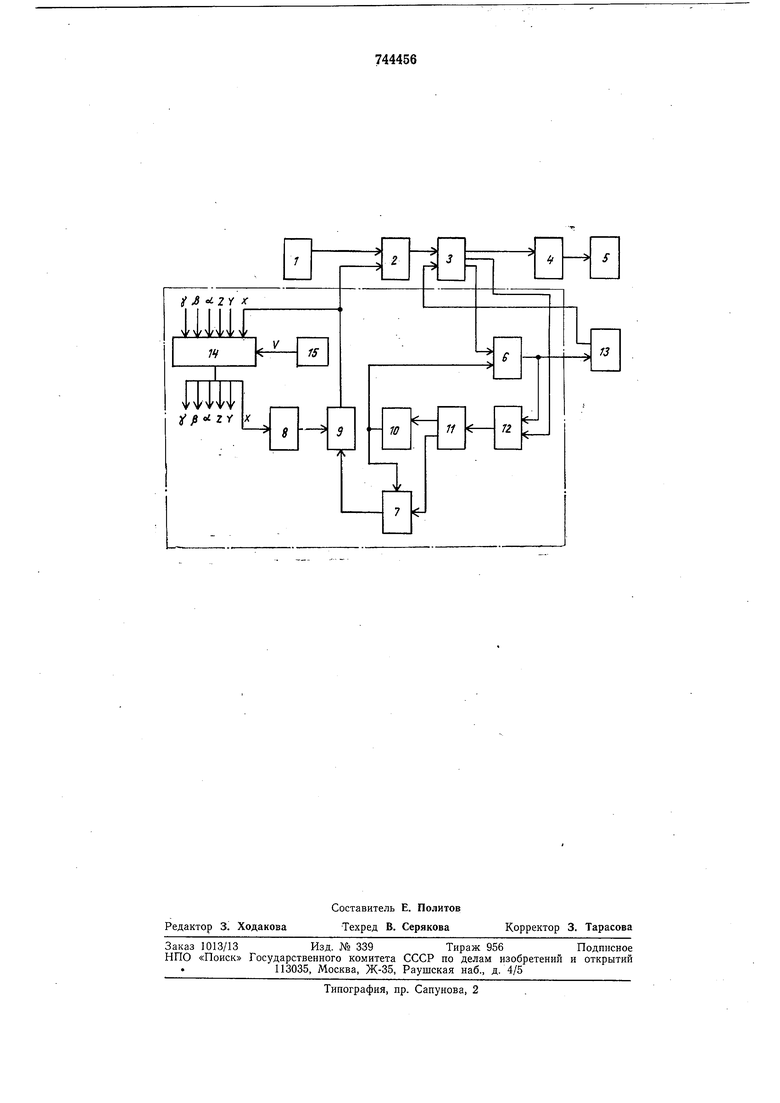
На чертеже представлена функциональная схема системы.
20 Она содержит блок ручного управления 1; управляемый генератор 2; блок коммутации 3; привод 4; исполнительный орган 5; элемент И 6; блок памяти 7; блок задания скорости 8; регулируемый усилитель 9;
25 нуль-орган 10; цифро-аналоговый преобразователь И; реверсивный счетчик 12; второй блок памяти 13; блок коррекции скорости 14; блок эталонного сигнала 15; У, Z, а, р, 7 - регулируемые координаты,
30 Система работает следующим образом.
В процессе обучения оператор, воздействуя на рукоятку блока 1 ручного управления, перемещает исполнительный орган 5 в необходимую точку заданной траектории, при этом импульсы с управляемого генератора 2 через блок 3 коммутации поступают одновременно на привод 4 и реверсивный счетчик 12, где происходит алгебраическое суммирование информации о перемещениях от точки к точке. Сигналы о величинах перемещений,, зафиксированные в реверсивном счетчике 12, через цифро-аналоговый преобразователь 11, поступают на первый блок памяти 7, который подключен к регулируемому усилителю 9 и устанавливает на нем коэффициент усиления, пропорциональный величине перемещения, зафиксированной в счетчике 12. Сигналы нуль-органа 10, подключенного к цифро-аналоговому преобразователю 11, поступают на один из входов элемента И 6. Сигнал, иронорциональный величине необходимой контурной скорости сварки, устанавливается оператором в блоке эталонного сигнала 15 перед началом обучения и постз ает на блок 14 коррекции скорости. После того как информация о перемещении мелсду точками зафиксирована в реверсивном счетчике 12, она переносится во второй блок памяти 13. При подаче команды «Запись блок задания скорости 8 вырабатывает напряжение, которое через регулируемый усилитель 9 поступает на управляемый генератор 2. Величина коэффициента усиления усилителя 9 устанавливается первым блоком памяти 7 иропорционально величинам перемещений по координатам. Генератор 2 вырабатывает импульсы с частотой, пропорциональной сигналу, поступающему на его вход. Одновременно сигналы с усилителей 9 поступают на входы X, Y, Z, а, |3, Y блока 14 коррекции скорости, в котором вычисляется результирующий вектор скорости и вырабатывается сигнал, пропорциональный его величине, сравнивается с величиной сигнала заданной скорости V. Если сигнал результирующего вектора больше заданного, то блок коррекции 14 вырабатывает сигнал на уменьшение напряжения вырабатываемого блоком 8 до тех пор, пока сигнал результирующего вектора, поступающий на генератор 2, не станет равным заданному. Импульсы с генератора 2 через блок коммутации 3 и элемент И 6 с частотой, пропорциональной результирующей величине скорости, поступают на вычитающий вход реверсивного счетчика 12 и в блок памяти 7. После того как вся информация о перемещении исполнительного органа 5 на данном
интервале вычтется из реверсивных счетчиков 12, нуль-орган 10 закроет элемент И 6. Одновременно нуль-орган 10 сбросит на ноль первый блок памяти 7. После этого программируют перемещения следующих
участков траектории. В автоматическом режиме программа со второго блока памяти 13 через блок коммутации 3 поступает на привод 4, который перемещает исполнительный орган 5.
Применение изобретения позволяет за счет введения контурного управления расширить функциональные возможности робота-манипулятора.
Формула изобретения
Система программного управления для робота-манипулятора, содержащая последовательно соединенные блок ручного управления, управляемый генератор, блок коммутации, приводи исполнительный орган, последовательно соединенные элемент И, реверсивный счетчик, цифро-аналоговый преобразователь, нуль-орган, первый блок
памяти и регулируемый усилитель, выход которого подключен к второму входу управляемого генератора, второй выход блока коммутации соединен со вторым входом реверсивного счетчика, а третий выход -
со вторым входом элемента И, второй вход которого подключен к выходу нуль-органа, а выход--к входу второго блока памяти, выход которого соединен со вторым входом блока коммутации, отличающаяся
тем, что, с целью расщирения функциональных возможностей системы, она содержит последовательно соединенные блок коррекции скорости и блок задания скорости, выход которого подключен ко второму входу
регулируемого усилителя, выход которого соединен с входом блока коррекции скорости.
Источники информации, принятые во внимание при экспертизе
1. Сныну Г. А. и др. Промышленные работы для дуговой сварки, № 9, 1976, с. 56- 62.
2. Авторское свидетельство СССР по заявке № 2447236/18-24, кл. В 25J 9/00,
25,02.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления для робота-манипулятора | 1977 |
|
SU713682A1 |
| Цифровая система программного управления роботом-манипулятором | 1979 |
|
SU943644A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Устройство для программного регулирования | 1979 |
|
SU864247A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Устройство для программного управления промышленным роботом | 1980 |
|
SU894675A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| ПРОГРАММНАЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU453672A1 |
| Устройство для программного управления позиционированием | 1985 |
|
SU1267360A1 |