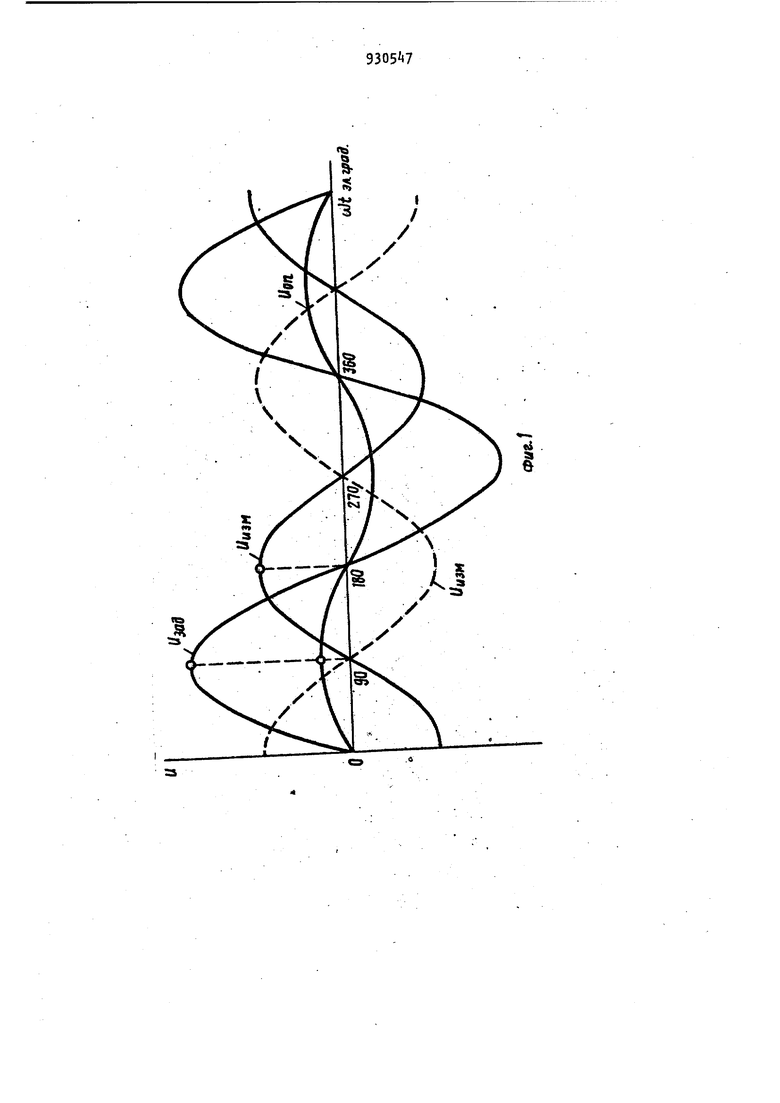
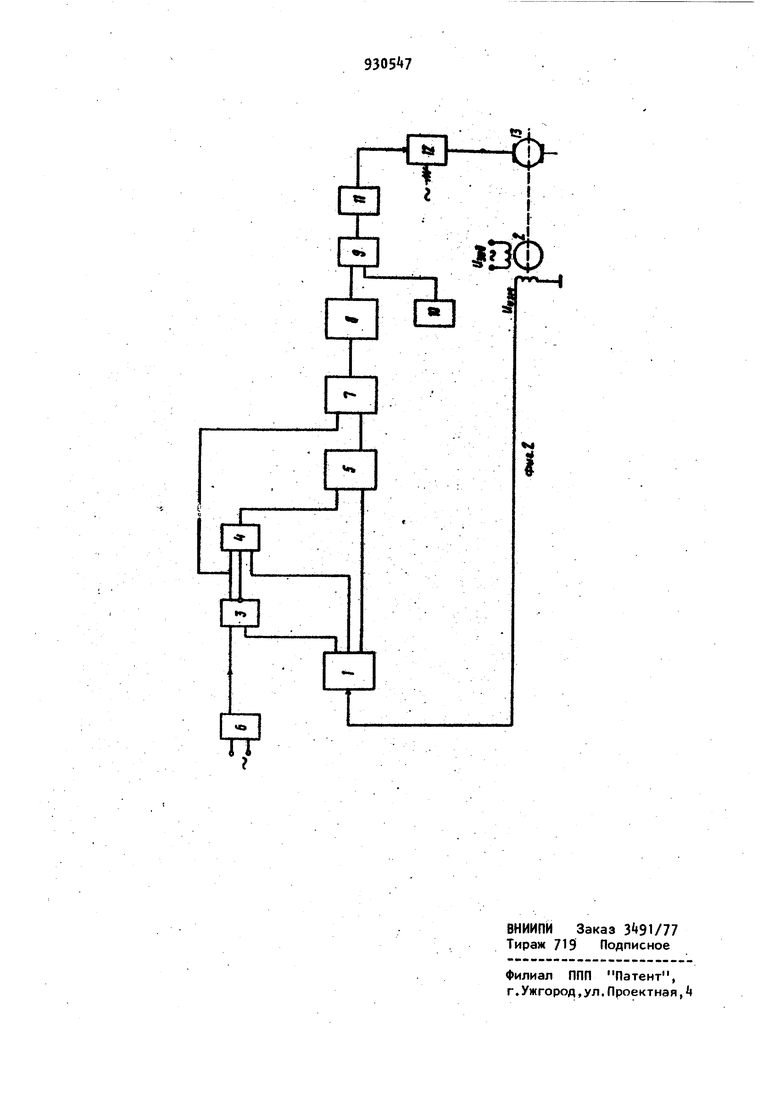
3 si Недостатком известного технического решения является необходимость yctaHOBKM фильтра, постоянная .времени которого зависит от частоты питающего тахогенератор напряжения и до пустимой величины пульсаций сигнала обратной связи. Так, при частоте питающей сети 400 Гц и пульсации напряж(ения 5% постоянная времени фильт ра составляет 4-10 мс. При задании частоты вращения в цифровом виде для данной пульсации сигнала обратной связи число разрядов задания не превышает пяти.. Повышение точности требует увеличения постоянной времени фильтра, наличие которого снижает быстродействие системы регулирования Другим недостатком является сниже ние jqHanasoHa регулирования, связанное с наличием в кривой напряжения измерительной обмотки составляющей, сдвинутой на 90 эл. град, относите ь но полезной и не зависящей от частоты вращения. Указанная составляющая приводит к появлению напряжения в це пи обратной связи при неподвижном двигателе. Недостатком известных способов яв ляется также необходимость искусственного получения коммутирующего cHr нала поворотом фазы задающего напряж ния, так как имеющееся напряжение измерительной обмотки тахогенератора сдвинуто ло фазе на 90 эл. град, относительно напряжения задающей :обмотки. Поддержание сдвига фаз неизменным требует специальных мер по стабилизации параметров узла. Целью изобретения является повышение быстродействия электропривода в переходных процессах при одновременном уменьшении динамической ошибки. Поставленная цель достигается тем, что согласно известному способу дополнительно определяют моменты пе:рехрда через нуль напряжения задаю щей обмотки тахогенератора и в кажды момент измеряют мгновенные значения напряжения измерительной обмотки тахогенератора и запоминают его для ис пользования в качестве модуля сигнала обратной связи по частоте вра1дения, в моменты запоминания определяю знаки напряжений задающей и измерительной обмоток тахогенератора и по этим знакам вырабатывают знак сигнала обратной связипо частоте вращения , на каждом полупериоде напряжени задающей обмотки тахогенератора из знака и модуля сигнала обратной связи по частоте вращения формируют сигнал обратной связи по.частоте вращения. Указанная цель ц устройстве достигается тем, что оно дополнительно снабжено аналогощифровым и цифроаналоговым преобразователями, преобразователем кода, Запоминающим регистром, компаратором, блоком синхронизации и вторым узлом сравнения, при этом вход аналогоцифрового преобразователя соединен с измерительной обмоткой тахогенератора, его первый выход - со вторым входом блока синхронизации, второй выход - с третьим входом второго узла сравнения, а третий выход - со вторым входом преобразователя кода, первый вход блока синхронизации подключен к выходу компаратора, по входу соединенного с задающей обмоткой тахогенератора, первый выход блока синхронизации подключен к первому входу второго узла сравнения и первому входу запоминающего регистра, а второй выход - ко второму входу узла сравнения, выходом соединенного с первым входом преобразователя кодов, выход которого соединен со вторым входом запоминающего регистра, а его выход - со входом цифроаналогового преобразователя, выхо-, дом подключенного ко второму входу первого узла сравнения. На фиг. 1 изображены графики изменения нулевого сигнала тахогенератора при неподвижном роторе, изменения мгновенного значения напряжения измерительной и задающей обмоток при вращающемся роторе; на фиг. 2 - функциональная схема данного устройства. Устройство содержит аналого-цифровой преобразователь 1, вход которого соединен с измерительной обмоткой тахогенера1тора 2 первый выход - со вторым входом схемы синхронизации 3 второй выход - с третьим входом второго узла сравнения , а третий вы-., ход - со вторым входом преобразователя кодов 5. Вход компаратора 6 соединен с задающей обмоткой тахогеиератора 2, а его выход - с первым входом блока синхронизации 3 Первый выход блока синхронизации 3 соединен с первым входом второго узла сравнения k и первым входом запоминающего регистра 7 а второй выход - со вторым входом второго узла сравнения Ц, выходкоторого соедиi нем с первым входом преобразователя кодов S- Выход преобразователя кодов 3 соединен со вторым входом запомина: ющего регистра 7 а его выход со входом цифро-аналогового преобразователя 8. Выход цифроаналогового преобразователя 8 соединен со вторым входом первого узла сравнения 9 первый вход которого соединен с элементом задания частоты вращения 10. Выход цифроаналогового преобразователя 9 подключен к усилителю 11с пропорционально-интегральной характеристикой, выходом соединенного с силовым преобразователем 12, который содержит элементы стабилизации и ограничения тока. К силовому преобразователю 12 подключен двигатель 13Сущность данного способа заключается в следующем:
Определяются моменты перехода через нуль напряжения задающей обмотки тахогенератора Ugcw каждый момент прохождения через ноль измеряют значение напряжения измерительной обмотки тахогенератора UVISM и запоминают его для использования в качестве модуля сигнала обратной связи по частоте вращения. В момент запоминания определяют знаки напряжений задающей и измериfeльнoй и,зтл обмоток тахогенератора. По этим знакам вырабатывают знак сигнала обратной связи по частоте вращения. На каждом полупериоде напряжения задающей обмотки тахогенератора из знака и модуля сигнала обратной связи по частоте вращения формируют сигнал обратной связи по частоте вращения.
При этом, если сигналы напряжений обмоток тахогенератора по знаку совпадают, то это соответствует вращению электропривода в положительную сторонуJ а если не совпадают в отрицательную.
Устройство, реализующее данный способ, работает следующим образом.
На вход аналого-цифрового преобразователя 1 поступает напряжение с измерительной обмотки тахогенератора величины этого напряжения зависит значение выходного кода аналогоч;ифровбго преобразователя 1. Далее код поступает на вход преобразователя кода 5- Туда .же, на вход знака, приходит сигнал, значение которого говорит о направлении ,
вращения двигателя 13, т.е. если поступает единичный сигнал, то это соответствует положительному направлению вращения, а если нулевой 5 то отрицательному. Сигнал знака формируется вторым узлом сравнения t из знаков напряжений задающей и измерительной обмоток тахогенератора 2. Причем, если сигналы напряжения обмоток тахогенератора по знаку совпадают, то на выхо де узла сравнения появляется единичный сигнал, а если не совпадают нулевой.
5 С,выхода преобразователя кода 5 .цифровой код записывается в запоминающем регистре 7в момент прохождения через нуль задающего напряжения запоминаются до следующего 0 прохождения через нуль этого напряжения. Момент прохождения через нуль определяется следующим образом.
На вход к жпаратора 6 поступает , синусоидальный сигнал с задающей 5 ; обмотки тахогенератора ° ложительной этого напряжения на выходе компаратора 6 выделяется прямоуголь44ый импульс, кото. рый поступает на вход блока синхронизации 3. Из этого импульса блок . синхронизации 3 формирует узкий импульс, синхронизированный с частотой тактового генератора аналогоцифрового преобразователя ,1, и соответствующий моменту прохождения через нуль задающего напряжения Ujd. Выходной код запоминающего регистра 7, соответствующий амплитудному значению напряжения измерительной обмотки Ц,з{л , поступает в ци,фро-аналоговый преобразователь 8, с выхода которого снимается аналоговый сигнал, используемый в качестве сигнала обратной связи. Этот Сигнал поступает на вход первого
узла сравнения 9, где сравнивается с сигналом задания частоты вращения, Результат сравнения поступает в аналоговую часть схемы регулирог J :ваниячастоты вращения, т.е. на вход усилителя с пропорциональноинтегральной характеристикой 11.
Способ регулирования частоты вра:щения и устройство для его осуществления по сравнению с известным обладает высоким быстродействием электропривода в переходных процессах изменения частоты вращения и малой динамической ошибкой. Формула изобретения 1. Способ регулирования частоты вращения электропривода для систем с taxoreHepaiTOpoM переменного тока, при котором сравнивают сигнал задания с сигналом обратной связи по частоте вращения и регулируют часто вращения электропривода в функции указанной -разности, отличающийся тем, что, с.целью повышения быстродействия электропри аода в переходных процессах при одновременном уменьшений динамичёс кой ошибки, дополнительно определяют моменты перехода через ноль напряжения задающей обмотки тахогенератора и в каждый момент измеряют мгновенное значение напряжения измерительной обмотки тахогенератора и запоминают его для использования в качестве модуля сигнала обратной связи по частоте вращения, в момент запоминания определяют знаки напряжений задающей и измерительной обмоток тахогенератора и по этим знакам вырабатывают знак сигнала обрат ной связи по частоте вращения, на каждом полупериоде напряжения задаю щей обмотки тахогенератора из знака и модуля сигнала обратной связи по частоту вращения формируют сигнал о ратной связи по частоте вращения. 2. Устройство для осуществления способа регулирования частоты враще ния электропривода для систем с тахогенератором переменного тока, содержащее последовательно соединенны элемент задания частоты вращения, первый узел сравнения, усилитель с пропорционально-интегральной характеристикой и силовой преобразова тель, а также тахогенератор с измерительной и задающей обмотками, о т л и ч а Ю .щ ее с я тем, что, с целью повышения быстродействия электропривода в переходных процес78сах при одновременном уменьшении динамической ошибки, оно дополнителы о снабжено аналогоч ифровым и цифрою налоговым преобразователями, преобразователем кода, запоминающим регистром, компаратором, блоком синхронизации и вторым узлом сравнения, при этом вход аналого.цифрового преобразователя соединен с измерительной обмоткой тахогенератора, его первый выход - со вторым входом блока синхронизации, второй выход - с третьим входом второго узла сравнения, а третий выход - со вторым входом преобразователя кода, первый вход блока синхронизации подключен к выходу компаратора, по вхо-i ду соединенного с задающей обмоткой тахогенератора, первый выход блока синхронизации подключен к первому входу второго узла сравнения и первому входу запоминающего регистра, а второй выход - ко вУорому входу узла сравнения, выходом соединенного с первым входом преобразователя кодов, выход которого соединен со вторым входом запоминающего регистра, а его выход - со .входом цифроаналогового преобразователя, выходом подключенного ко второму входу перво-) го узла сравнения. Источники информации, принятые во внимание при экспертизе 1.Тун А.Я. Тахогенераторы для систем управления электроприводами. М.-Л. i Энергия, 1966, с. . 2.Экспериментальное исследование макета электропривода с ПЦУ и связи его с УВМ М 6000 ОЛА.127.033, № Гос. регистрации 77030393, М., 1977, с. 11. 3.Лебедев Е.Д., Неймарк В.Е., Пистрак М.Я./Слежановский О.В. Управление вентильным электроприводом постоянного тока. М., Энергия, 1970, с. 139-1«2, 76-82.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования положения вала электродвигателя | 1980 |
|
SU930546A1 |
| Электропривод | 1987 |
|
SU1495971A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2014722C1 |
| Электропривод переменного тока с бесконтактным тахогенератором | 1986 |
|
SU1411912A2 |
| Электропривод переменного тока | 1988 |
|
SU1767689A1 |
| Способ управления качанием кристаллизатора машины непрерывного литья заготовок | 1982 |
|
SU1097441A1 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2003 |
|
RU2258297C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU2069033C1 |