(54) СТРОИТЕЛЬНЫЙ ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Строительный подъемник | 1989 |
|
SU1749145A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| Подъемник | 1988 |
|
SU1567495A1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ, МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА С ХРАНЕНИЕМ АВТОМОБИЛЕЙ НА ПОДДОНАХ, ПРИЁМНО-ПОВОРОТНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ С ПОДЪЁМНОЙ КЛЕТЬЮ, КЛЕТЬ ДЛЯ ТРАНСПОРТИРОВКИ ПОДДОНА ВНУТРИ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ, МЕХАНИЗМ СИНХРОННОГО ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩИХ КАРЕТОК КЛЕТИ, АВТОМОБИЛЬНЫЙ ПОДДОН | 2002 |
|
RU2208113C1 |
| ПЛАВАЮЩАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 1995 |
|
RU2115584C1 |
| Устройство для перемещения шахтных вагонеток | 1979 |
|
SU861271A1 |
| Строительный подъемник | 1989 |
|
SU1676987A1 |
| Строительный подъемник | 1980 |
|
SU927708A1 |
| Канатный строительный подъемник для длинномерных грузов | 1981 |
|
SU1002222A1 |
I
Изобретение относится к подьемнотрансаортному машиностроению и касает. ся конструирования строительных подъельников.
Известен строительный подъемник, содержащий колонны, несущие вертикально перемещающуюся посредством ариводного винтового домкрата платформу с площадкой и мостиками, тяговые механизмы площадки и мостиков, включающие в себя противовесы со спаренными гибкими тягами, запасованными в звездочках механизмов сцепления .
Недостаток указанного подъемника заключается в невысоком диапазоне фронтальнъгх работ и низкой надежности в работе.
Цель изобретения - расширение фронта работ и повышение надежности действия.
Для достижения цели подъемник снабжен концевыми одинарными и нижними спаренными звездочками, а также дополнительными гибки fи тягами, при этом ,
концевые одинарные звездочки установлены на противоположных сторонах платформы и на них запасованы спаренные гибкие тяги, при этом спаренные звездочки установлены в нижних частях колонн и на них запасованы дополнительные гибкие тяги, связанные с площадкой.
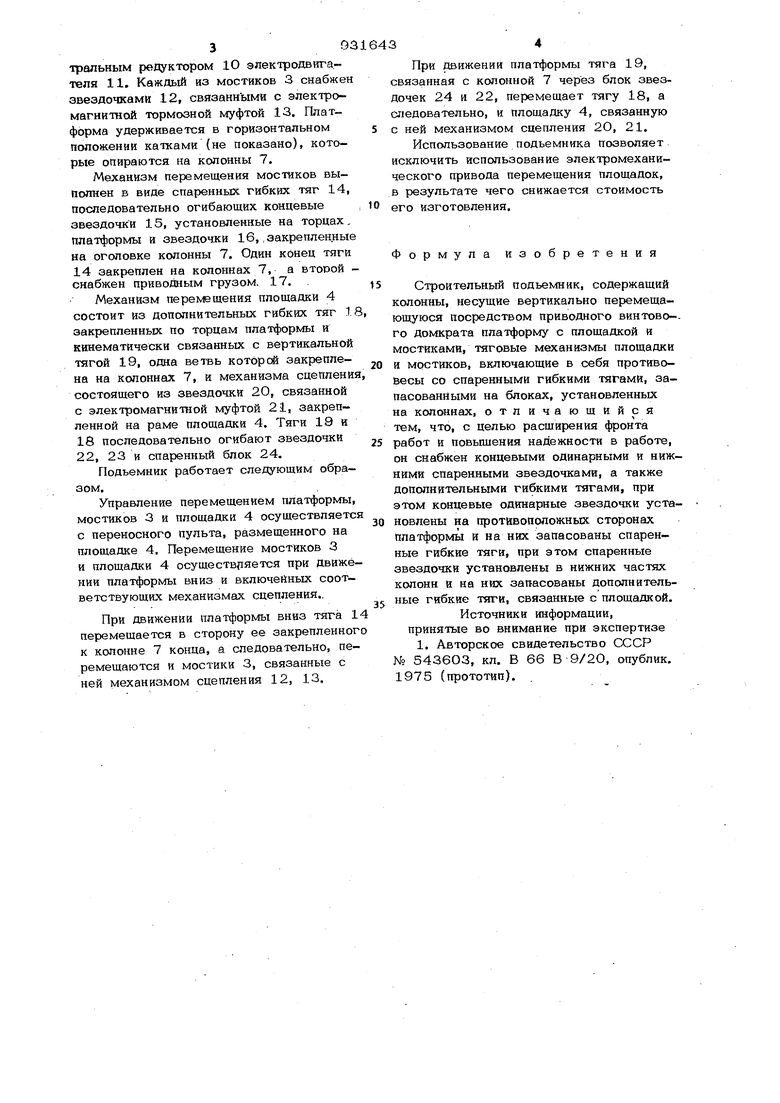
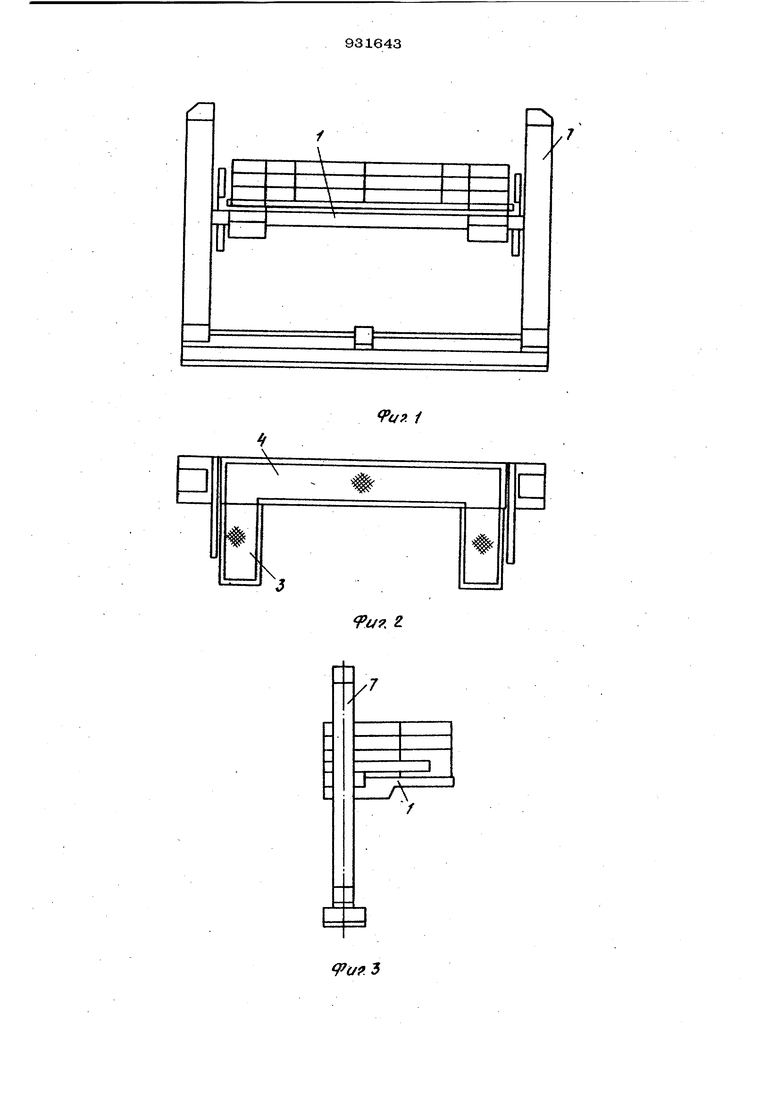
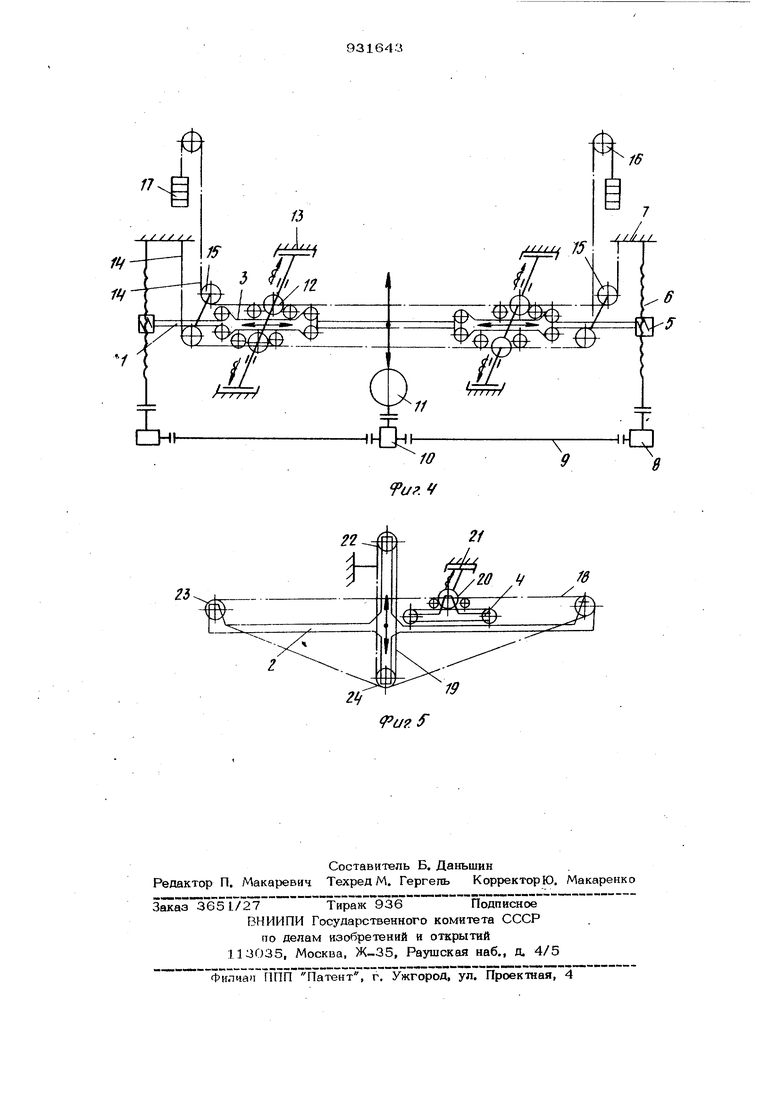
На фиг. 1 схематически изображен предлагаемъ1й подъемник, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, вид сбоку; на фиг. 4 - кинематическая схема подъемника, вид сбоку; на фиг. 5 - то же, вид сверху.
Подъемник содержит платформу с продольными 1 и поперечными 2 направляющими. На продольнъа направляющих 1 установлены подвижные мостики 3, а на поперечнъгх - площадка 4. На концах продольных направляющих 1 установлены резьбовые опоры 5, сопряженные с ходовыми винтами 6 домкрата, закрепленными на колоннах 7, при этом нижние концы ходоЬък винтов посредством червячнък .редукторов 8 с валами 9 связаны с цен- 30 тральным редуктором 10 электродвигателя 11. Каждый из мостиков 3 снабжен звездочками 12, связанными с электромагнитной тормозной муфтой 13. Платформа удерживается в горизонтальном положении катками (не показано), которые опираются на колонны 7. Механизм перемещения мостиков выполнен в виде спаренных гибких тяг 14, последовательно огибающих концевые звездочки 15, установленные на торцах, платформы и звездочки 16, .закрепленны на оголовке колонны 7. Один конец тяги 14 закреплен на колоннах 7, а ВТОРОЙ снабжен приводным грузом. 17. Механизм перемещения площадки 4 состоит из дополнительных гибких тяг 1 закрепленных по торцам платформы и кинематически связанных с вертикальной тягой 19, одна ветвь которой закреплена на колоннах 7, и механизма сцеплени состоящего из звездочки 20, связанной с электромагнитной муфтой 21, закрепленной на раме площадки 4, Тяги 19 и 18 последовательно огибают звездочки 22, 23 и спаренный блок 24. Подъемник работает следующим образом. Управление перемещением платформы мостиков 3 и площадки 4 осуществляетс с переносного пульта, размещенного на площадке 4. Перемещение мостиков 3 и площадки 4 осуществряется при движе нии платформы вниз и включенных соответствующих механизмах сцепления.. При движении платформы вниз тяга 1 перемещается в сторону ее закрепленног к колонне 7 конца, а следовательно, перемещаются и мостики 3, связанные с ней механизмом сцепления 12, 13. 3 При движении платформы тяга 19, связанная с колонной 7 через блок звездочек 24 и 22, перемещает тягу 18, а следовательно, и площадку 4, связанную с ней механизмом сцепления 20, 21. Использование подъемника позволяет исключить использование электромеханического привода перемещения площадок, в результате чего снижается стоимость его изготовления. Формула изобретения Строительный подъемник, содержащий колонны, несущие вертикально перемещающуюся посредством приводного винтово-. го Домкрата платформу с площадкой и мостиками, тяговые механизмъ площадки и мостиков, включающие в себя противовесы со спаренными гибкими тягами, запасованНыми на блоках, установленных на колоннах, отл ича ющийся тем, что, с целью расщирения фронта работ и повъпиения надежности в работе, он снабжен концевыми одинарными и нижними спаренными звездочками, а также дополнительными гибкими тягами, при этом концевые одинарные звездочки установлены на противоположных сторонах платформы и на них запасованы спаренные гибкие тягн, при этом спаренные звездочки установлены в нижних частях колонн и на них запасованы дополнительные гибкие тяги, связанные с площадкой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 5436ОЗ, кл. В 66 В 9/2О, опублик. 1975 (прототип).
x
Zl
/
/
Q
fPcf. 1
i/9. f
t/.
