(54) КАНАТНЫЙ СТРОИТЕЛЬНЫЙ ПОДЪЕМНИК ДЛЯ ДЛИННОМЕРНЫХ ГРУЗОВ


| название | год | авторы | номер документа |
|---|---|---|---|
| Канатный строительный подъемник для длинномерных грузов | 1983 |
|
SU1127833A1 |
| Строительный подъемник | 1981 |
|
SU977350A1 |
| Струнный строительный подъемник | 1987 |
|
SU1449503A1 |
| Строительный подъемник | 1980 |
|
SU945042A1 |
| Канатный строительный подъемник | 1980 |
|
SU893792A2 |
| Строительный подъемник | 1988 |
|
SU1588677A1 |
| Канатный строительный подъемник | 1979 |
|
SU867838A1 |
| Строительный подъемник | 1989 |
|
SU1749145A1 |
| Строительный подъемник | 1960 |
|
SU140547A1 |
| Строительный подъемник | 1987 |
|
SU1444269A1 |
1
Изобретение относится к строительным и монтажным работам, а именно к канатным строительным подъемник)ам, предназначенным для подачи строительных материалов и оборудования в проемы зданий. Подъемник может быть использован как на строящихся объектах, так и при их ремонте.
Известен канатный строительный подъемник, содержащий опору на кровле, грузовую трособлочную систему с. замкнутым канатом, соединенную с лебедкой и грузонесущим устройством, включающим стойку с направлякяцими блоками и грузовую емкость, соединенные между собой при помощи расположенных на разных уровнях двухзвенных механизмов и четырехзвенного механизма, два звена которого выполнены с консолями и роликами в верхней и нижней вершинах для присое- 20 цинения каната 11 .
Недостатком подъемника является-невозможность направленной подачи в проемы зданий длинномерных грузов, .например досок труб и др. в горизонтальном положении без использования дополнительных устройств.
Цель изобретения - обеспечение подъема и направленной подачи в проем здания длинномерных грузов.
Это достигается тем, что в предложенном канатном строительном подъемнике грузовая емкость выполнена в виде горизонтальной платформы, установленной с возможностью перемещения по роликам относительно стойки, при этом ее передний конец соединен с внешними . звеньями шарнирно-рычажных механизмов.
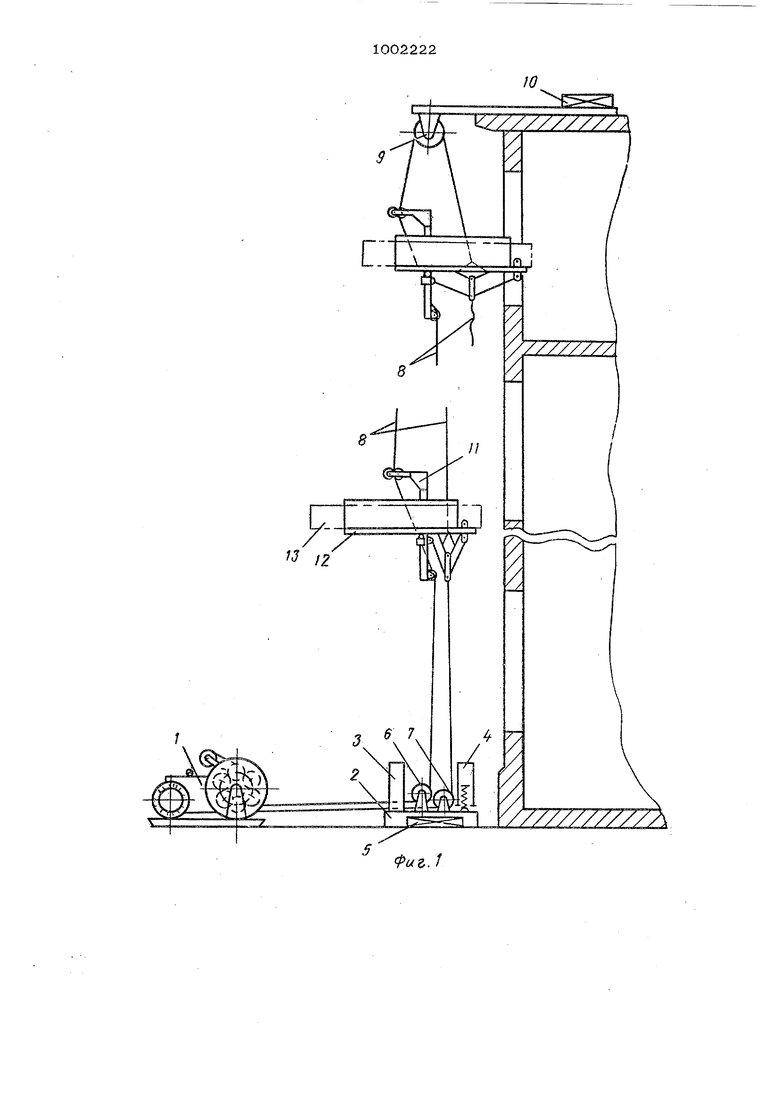
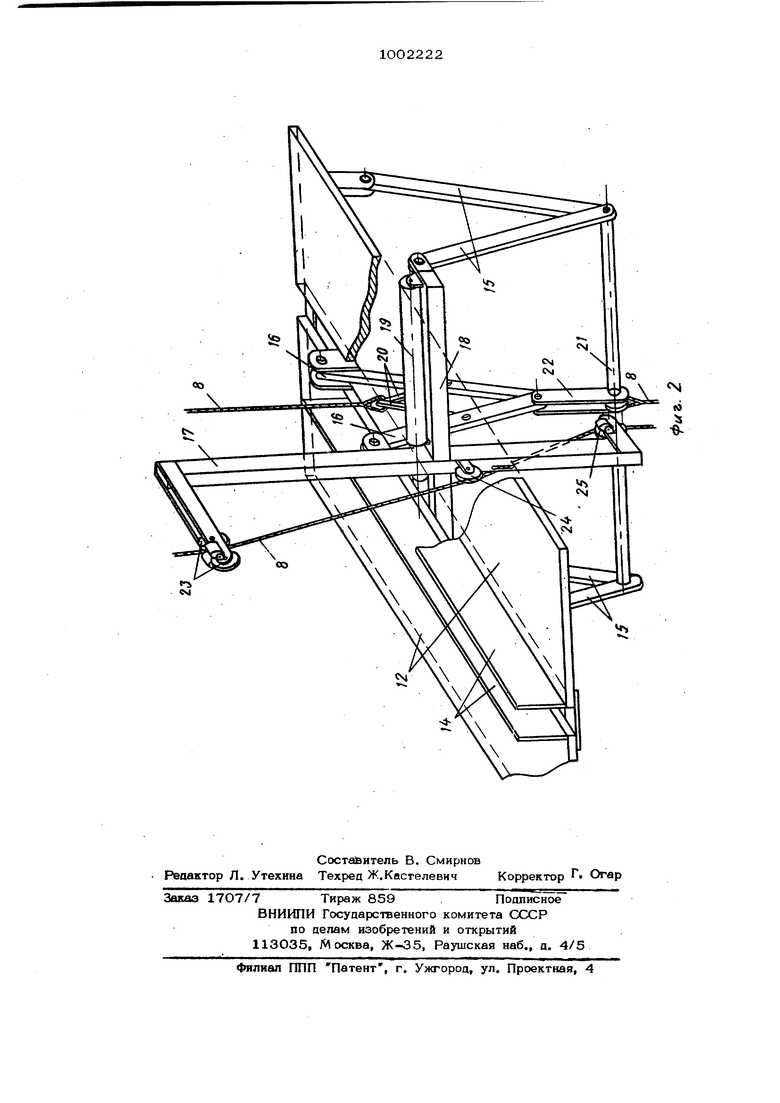
На фиг. 1 показан схематически подъемник; на фиг. 2 - грузонесушее устройство в аксонометрии.
Подъемник содержит лебедку 1 для привода замкнутого каната с механизмом для его натяжения, находящуюся на определенном расстоянии от приемной площадки 2, на которой расположены жесткая опорная стойка 3 и подпружиненная опорная стойка 4 с концевым выключагелем двигателя лебедки, противовесом 5 для прецотвращения сдвига приемной площадки, а также направляющие блоки 6 и 7 для замкнутого каната 8. Последний , огибает направляюший блок 9, расположенный на багасе с противове сом 10, расположенные на кровле и запасованные обеими ветвями на грузонесущем устройстве 11, имеюшем платфор мы 12 для размещения длинномерного груза 13. Замкнутый канат предназначен для вертикального перемещения устройства 11 посла создания в нем предварительного натяжения и для горизонтального выдвижения платформы 12 с грузом 13 в проемЗдания от действия их сил тяжести при снятии этого натяже ния. Грузонесущее. устройство состоит из платформы 12, образованной двумя соединенными между собой площадками, им ющими ограи дение 14 для предотвращения касания каната 8 и груза 13. Платформа передней частью соединена при по мощи двух пар шарнирных боковых рыча гов 15 и одной пары центральных шарнирных рычагов 16, стойкой 17, имеющей боковые кронштейны 18, на которых расположены ролики 19. На ролики 19 опираются площадки платформы 12. На центральных рычагах установлена пара шарнирных малых рычагов 2О, к которым присоединен верхний конец внут ренней ветви каната 8. Боковые рычаги соединены между собой при помощи попе речной тяги 2 Ij а с центральными рыча гами при помощи пластин 22. К пластинам присоединен другой конец внутренней вет ви замкнутого каната, идущей на лебедку. Таким образом, центральные большие 16 и малые 2О рычаги образуют четырехзвенник, Bi зависимости от натяжения каната 8, действующего на его вершины осуществляется управление положением платформы 12 относительно стойки 17. На этой стойке установлены направляющие блоки 23, 24 и 25, для заласовки внешней ветви каната 8, выполняющей при работе подъемника роль направляющей струны, благодаря натяжению которой создается удерживающий момент прот1Ш опрйкидывания грузонесущего устройства. Блоки 23 и 25 снабжены боковыми роликами для исключения недопустимых углов девиации при боковых наклонах грузонесущего устройства, возникакацих при неравномерной загрузке правой и левой площадок платформы 12. 10 224 Канатный строительный подъемник работает следующим образом. Перед началом работы лебедку 1 и площадку 2 устанавливают перёд зданиек с таким расчетом, чтобы ветви каната 8 располагались вертикально, и на таком расстоянии от здания, чтобы исключить касание груза 13 и платформы 12 в стену. При загрузке платформу 12 устанавливают на стойки 3 и 4 площадки 2. Перед подъемом при помощи механизма натяжения лебедки 1 создается определенное натяжение в замкнутом канате, при котором обеспечивается предельное складывание рычагов 15, 16 и 20 в направлении вертикальной оси. Далее при помощи канатоведущих шкивов лебедки и замкнутого каната осуществляется подъем грузонесушего органа на необходимую высоту. При подъеме (как правило) центр тяжести груза смешен от точек прикрепления каната к грузонесушему устройству и ссхздается опрокидывающий момент. Однако он уравновешивается (в основном) за счет упругого отпора внешней ветви, запасованной в блоки 23 и 25, расположенные на стойке 17. Таким образом, для вертикаль-, ного движения грузонесушего органа необходимо определенное натяжение в замкнутом канате, при котором его две ветви выполняют роль натянутых струн, обеспечршаюших равновесие устройства и исключающих его раскачивания. Для горизонтального перемещения грузовой платформы в проем здания натяжение в замкнутом канате сбрасывается до определенной величины, и грузонесущее устройство оказывается подвешенным только к верхней вершине четырехзвенника, образованного рычагами 16 и 20. Благодаря приложению нагрузки к консолям рычагов 16 четырехзвенник от действия сил тяжести складьшается в направлении горизонтальной оси. При этом грузовая платформа при помошя рычажной системы смещается в проем, катясь по роликам 19, ycтaнoвлeнньпvl на кронштейнах 18 стойки 17. В процессе подачи грузовой платформы в проем меняются условия равновесия грузонесущего устройства. Уменьшению величины опрокидывающего момента соответствует уменьшение удерживающего момента от упругого отпора в нешней ветви замкнутого каната, нагруженной в основном от действия силы тяжести грузонесущего устройства и груза. Соотношение моментов определяется при конструировании, в частности,выбором мест расположения блоков 23 и 25. Однако горизонтальное выравнивание грузовой платформы возможно также за счет натяжения каната, но в пределах допускающих складьшание рычажного механизма в направлении горизонтальной оси (это зависит от соотношения консольной и полной длины рычагов 16).
После разгрузки платформы грузонесушее устройство возвращается на ппошадку 2. Это делается после натяжения замкнутого каната и приведения в движение каната. На приемной площадке грузовая платформа ложится на стойки 3 и 4. При этом в момент касания выключается лебедка от действия концевог выключателя, расположенного на одной КЗ стоек, например 4.
Предложенная конструкция подъемника позволяет эффективно решать вопросы подачи длинномерных rpyafoB, в проемы зданий. . формула изобретения
Канатный строительный подъемник дл длинномерных грузов, содержащий опору
на кровле, грузовую трособлочную систему с замкнутым канатом, соединенную с лебедкой и грузонесуишм устройством включающим стойку с направляющими блоками и грузовую емкость, соединенные между собой при помоши расположенных на разных уровнях двухзвенных | механизмов и четырехзвенного механизма, два звена которого выполнены с консолями и роликами в верхней и нижней вершинах для присоединения каната, отличающийся тем, что с целью обеспечения подъема и направленной подачи в проем здания длинномерных грузов грузовая емкость вьтопнена в виде горизонтальной платформы, установленной с возможностью перемещения по ролякам относительно стойки, при этом ее передний конец соединен с внешними звеньями шарнирно-рычажных механизмов.
Источники информации, принятые во внимание при экспертизе
