{5) ПОДЪЕМНО-ТРАНСПОРТНАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная система | 1987 |
|
SU1643414A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С КРЮКОМ-САМООТЦЕПОМ И САМООТКРЫВАЮЩИМСЯ ЗАТВОРОМ ПРИ СНЯТИИ ГРУЗА | 2003 |
|
RU2245291C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ЗАПИРАНИЯ КОНТЕЙНЕРА | 2021 |
|
RU2817632C1 |
| Контейнер для транспортировки сыпучих материалов | 1981 |
|
SU1034961A1 |
| СВЕТОЗАЩИТНОЕ УСТРОЙСТВО | 1993 |
|
RU2054115C1 |
| Чалочное приспособление для подъема грузов посредством стропов | 1975 |
|
SU556099A1 |
| Самоотцепляющееся захватное устройство | 1987 |
|
SU1495263A1 |
| СПОСОБ КАНТОВАНИЯ КРУПНОГАБАРИТНЫХ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2020 |
|
RU2742665C1 |
| Грузозахватное устройство | 1987 |
|
SU1444279A1 |
| Контейнер для сыпучих грузов | 1978 |
|
SU895827A1 |
I
Изобретение относится к машиностроению, а именно к оснастке для выполнения погрузо-разгрузочных работ.
Известна подъемно-транспортная система, содержащая захват, контейнер с чалочным приспособлением и запорное устройство, состоящее из корпуса , в котором выполнен паз под один из концов чаломного приспособления, при этом в пазу размещен поворотный подпружиненный рычаг с элементом для запирания чалочного приспособления р.
К недостатку известной системы следует отнести сложность конструкции.
Цель изобретения - упрощение конструкции системы.
Эта цель достигается тем, что корпус запорного устройства закреплен на контейнере, а чалочное приспособление выполнено в виде одноплечего рычага, а его конец, входящий в паз снабжен шарово11 опорой,
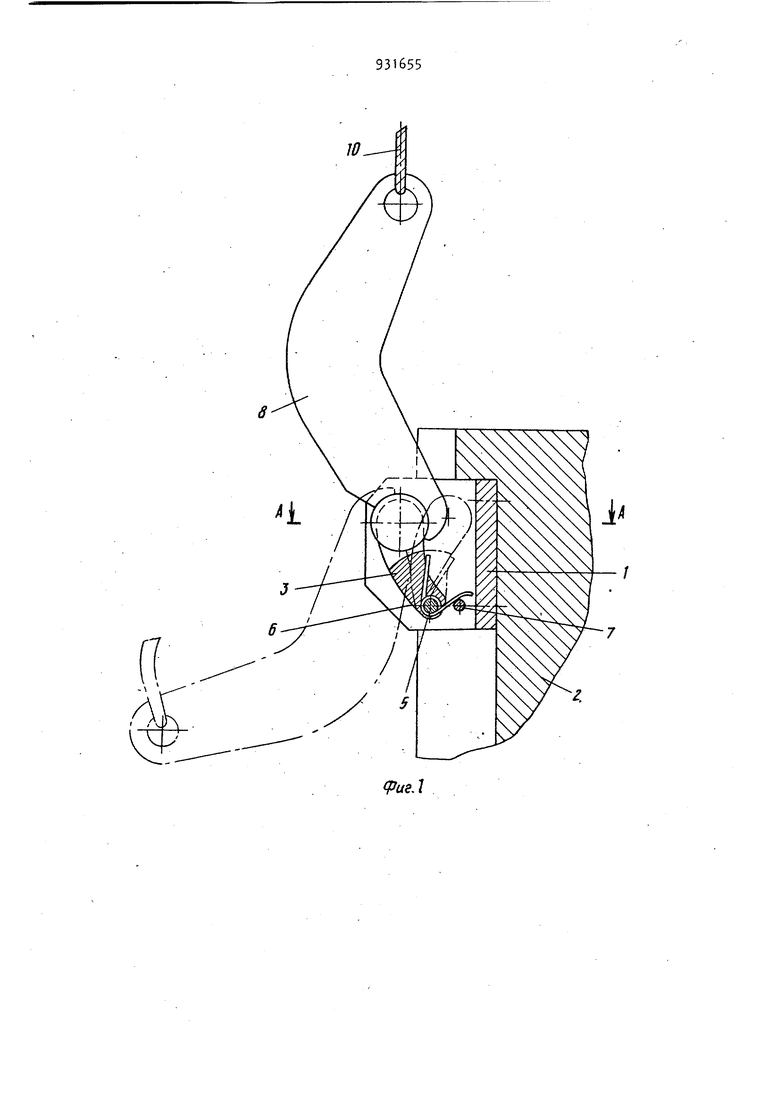
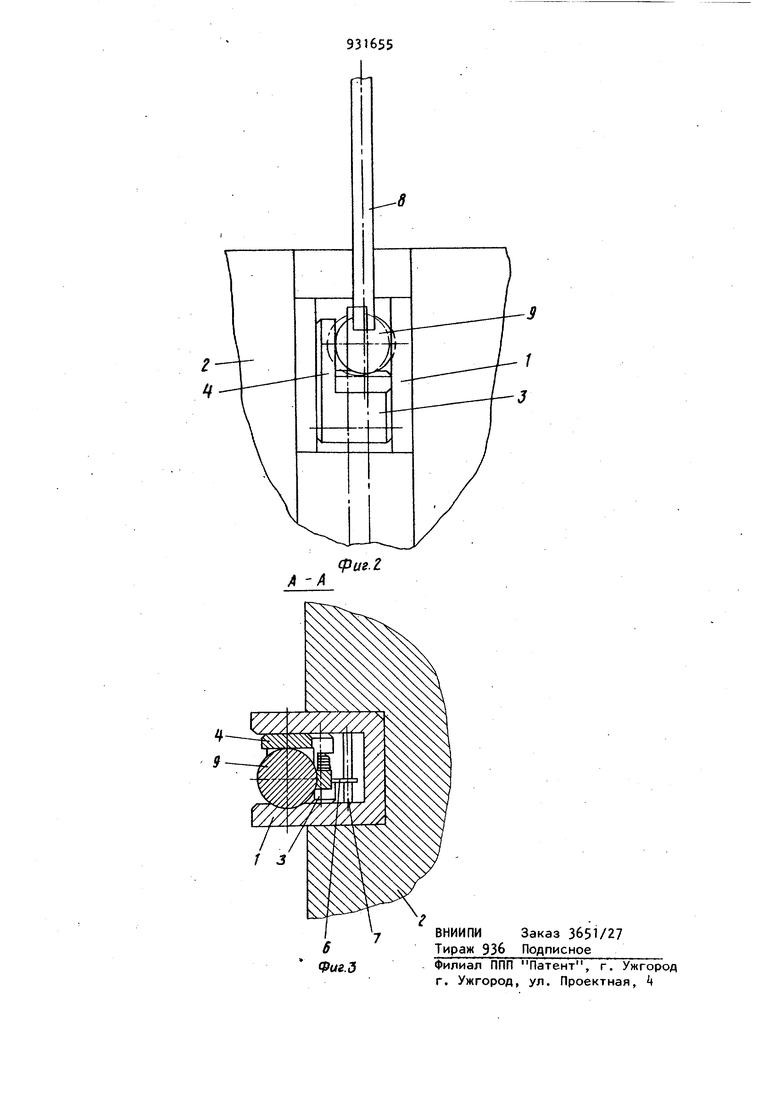
На фиг. 1 изображена конструктивная схема системы в продольном сечении; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечение А-А на фиг. 1.
Подъемно-транспортная система содержит запорное устройство, включающее П-образный корпус 1, жестко закрепленный на переносимом контейнере 2. В пазу корпуса 1 размещен рычаг 3 с плоским выступом Ц, установtoленный на оси 5 и нагруженный пружиной 6 с упором на оси 7. Чалочное. приспособление в виде одноплечего рычага 8с шаровой опорой 9 защемлено между корпусом 1 и плоским выступом Ц рычага 3 и соединен со стропом 10.
Система работает следующим образом.
При действии груза строп 10 нагру20жен и элементы системы занимают положение, соответствующее изображенному на фиг. 1 сплошнымилиниями. В этом положении на шаровую опору 9
одноплечевого рычага 8 действует система сил, сумма которых равна О, Действительно, со стороны корпуса 1 на шаровую опору 9 действует реакция, горизонтальная составляющая которой уравновешивается реакцией со стороны плоского выступа k рычага 3, а вертикальная - натяжением грузового стропа 10.
При окончании действия нагрузки строп 10 ослабляется, в результате чего одноплечий рычаг 8 (под действием неуравновешенного момента от силы тяжести самого рычага начнет поворачиваться вокруг оси защемления шаровой опоры 9 и, переместившись до контакта с рычагом 3, начнет поворачивать его вокруг оси 5, преодолевая только действие пружины 6, так как с прекращением действия силы со стороны грузового стропа 10, исчезает действие силы со стороны шаровой опоры 9- Взаимодействие одноплечевого рычага 8 с рычагом 3 продлится до тех пор, пока шаровая опора 9 полностью не освободится от защемляющего действия со стороны корпуса 1 и плоского выступа k рычага 3 и под действием силы тяжести не выпадет вниз. После чего рычаг 3 возвращается в исходное положение.
Для приведения устройства в исходное положение перед подъемом груза достаточно одноплечий рычаг 8 ввети в паз корпуса 1, отжимая рычаг 3,
с последующим боковым смещением в сторону поднутрения, обеспечивая возврат рычагу 3 в исходное положение. Использование в предлагаемом устройстве.минимального числа звеньев, а также простота кинематической схемы, заложенной в устройстве, повышает надежность автоматического отсоединения груза, чем и .достигается
технико-экономический эффект.
Формула изобретения
Подъемно-транспортная система, содержащая захват, контейнер с чалочным приспособлением и запорное устройство, состоящее из корпуса, в котором выполнен паз под один из- концов чалочного приспособления, при этом в пазу размещен поворотный подпружиненный рычаг с элементом для запирания чал.очного приспособления, отличающаяся тем, что, с целью упрощения конструкции, корпус запорного устройства закреплен на контейнере ,а чалочное приспособление выполнено в виде одноплечего рычага, а его конец, входящий в паз, снабжен шаровой опорой.
Источники информации, принятые во внимание при экспертизе
