)
сд
1C
о:
СА:)
Изобретение относится к подъемно- транспортному оборудованию, в частности к самоотцепляющимся грузозахватным устройствам.
Цель изобретения - упропдение конструк- ции, повышение надежности и снижение материалоемкости.
На фиг. 1 изображено предлагаемое самоотцепляющееся захватное устройство в ненагруженном состоянии, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - положение элементов устройства в момент ослабления натяжения в стропах.
Самоотцепляюшееся захватное устройство содержит корпус, выполненный в виде щек 1, соединенных осями 2-4. На оси 3 щар- нирно навешена грузозахватная скоба 5 в виде балки.
На оси 2 щарнирно навещен поворотный фиксатор 6 вильчатой формы, в паз 7 которого входит носок 8 скобы 5 и опирается на стягивающую паз 7 ось 9, носок 8 скобы 5 выполнен со скосом 10. Грузозахватная скоба 5 в открытом состоянии зева 1 1 провисает под действием собственного веса, а в закрытом состоянии зева 11 устанавливается горизонтально, опираясь на ось 9 фиксатора 6, ко- торый под действием своего веса всегда занимает вертикальное положение. Все устройство подвешивается к стропу 12 грузоподъемного механизма посредством серьги 13. В щеках 1 выполнен паз 14, в котором расположена с возможностью возвратно- поступательного перемещения ось 15 с распорной втулкой 16. Ось 15 соединена с серьгой 13. На втулку 16 навещен толкатель 17, выполненный заодно с охватывающей втулкой 18 и соединенной со стороны зубчатого упора 19 пружиной 20, которая удерживает толкатель 17 в зафиксированном подпружиненном положении (состоянии).
Поворотный фиксатор 6 выполнен с выступом 21, а толкатель 17 - с выемкой 22, в которую входит в ненагруженном состоянии устройства выступ 21 фиксатора 6, удерживая фиксатор 6 в зафиксированном положении. Фиксирует его также и ось 9, на которую опирается носком 8 скоба 5. Позицией 23 обозначен грузовой строп (коль- цо стропа или петля контейнера, панели и др.).
Устройство работает следующим образом.
Строп 23 одевается на грузозахватную скобу 5 и последняя из свободного положе- ния переводится в положение, показанное на
фиг. 1 основной линией, а поворотный фиксатор 6 отводится против хода часовой стрелки и обратно, носок 8 скобы 5 при этом садится на ось 9 фиксатора. Строп 23 оказывается в закрытом зеве 11. При отводе фиксатора 6 его выступ 21 надавливает на зубчатый упор 19, а так как толкатель 17 подпружинен, то после того, как фиксатор 6 станет в вертикальное положение, пружина 20 установит толкатель 17 в нормальное положение (фиг. 1).
При подъеме груза усилие в стропах, преодолевая усилие пружины 20, перемещает ось 15 в пазу 14 вверх, пружина 20 растягивается. При этом зубчатый упор 19, проходя вдоль выступа 21, отклоняется по ходу часовой стрелки и становится опять в свое положение, так как он подпружинен. Груз перемещают. После постановки груза на место и ослабления усилия в стропах от веса груза пружина 20, сжимаясь, перемещает ось 15 в пазу 14 с толкателем 17 в нижнее положение. При этом зубчатый упор 19 надавливает на выступ 21 и поворачивает фиксатор 6 против хода часовой стрелки и выводит из зацепления скос 10 носка 8 скобы 5 с осью 9. Зубчатый упор 19, перемещаясь вниз, становится в крайнее исходное положение. Скоба 5 поворачивается со стропом 23, который сползает с нее. Происходит самоотцеп стропов от устройства. Ходом каретки груоподъемного механизма стропы 23 вытягивают из под груза. Устройство готово к очередной застроповке груза.
Формула изобретения
Самоотцепляющееся захватное устройство, содержащее корпус со сквозным пазом, в котором размещена с возможностью возвратно-поступательного перемещения ось для связи с грузоподъемным механизмом, толкатель, соединенный пружиной с корпусом, скобу для груза, поворотный фиксатор с пазом для размещения носка скобы на одном плече и с выступом для взаимодействия с толкателем на втором плече, отличающееся тем, что, с целью упрощения конструкции, повыщения технологичности изготовления и снижения материалоемкости, корпус выполнен из двух щек, соединенных между собой осями, толкатель размещен на оси для связи с грузоподъемным механизмом и выполнен с выемкой для размещения выступа фиксатора, носок скобы для груза выполнен со скошенной выемкой.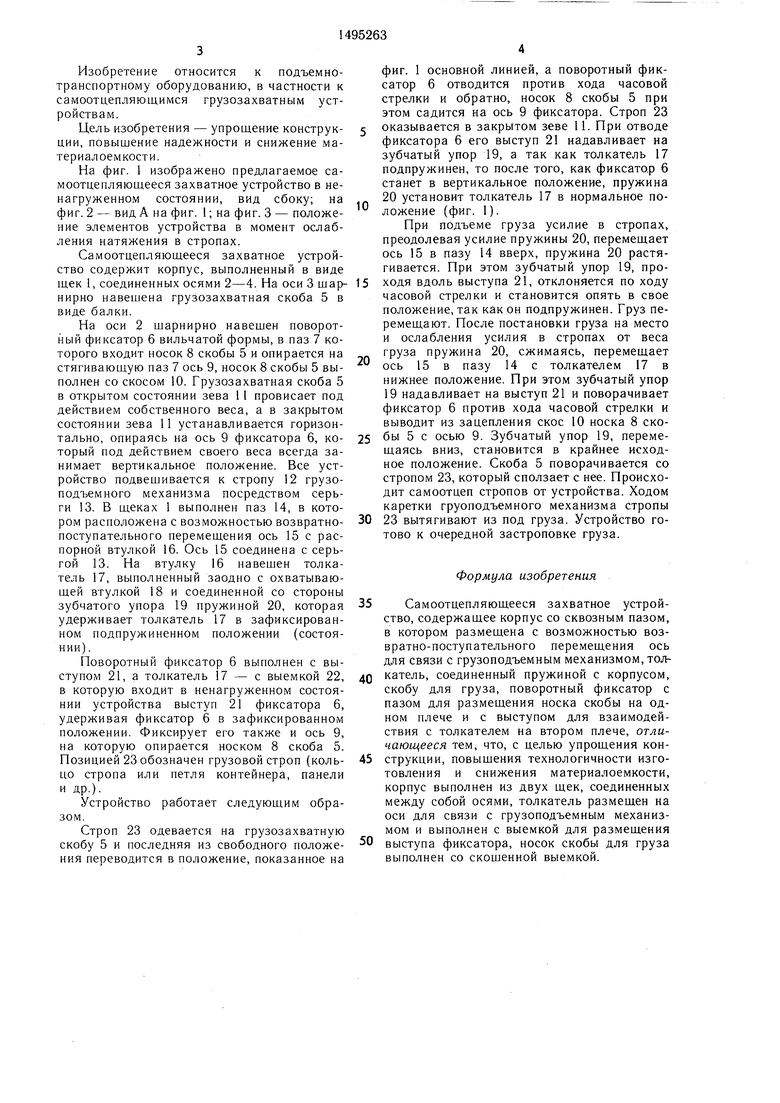
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоотцепляющееся захватное устройство | 1987 |
|
SU1495261A1 |
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1379226A1 |
| Самоотцепляющийся крюк | 1982 |
|
SU1079595A1 |
| Самоотцепляющийся крюк | 1975 |
|
SU700419A1 |
| Саморасцепляющееся грузозахватное устройство | 1990 |
|
SU1754620A1 |
| Самоотцепляющееся захватное устройство | 1982 |
|
SU1081110A1 |
| Грузозахватное устройство | 1984 |
|
SU1278289A2 |
| Самоотцепляющееся захватное устройство | 1982 |
|
SU1137054A1 |
| Грузозахватное устройство | 1975 |
|
SU543606A2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2007 |
|
RU2341443C1 |
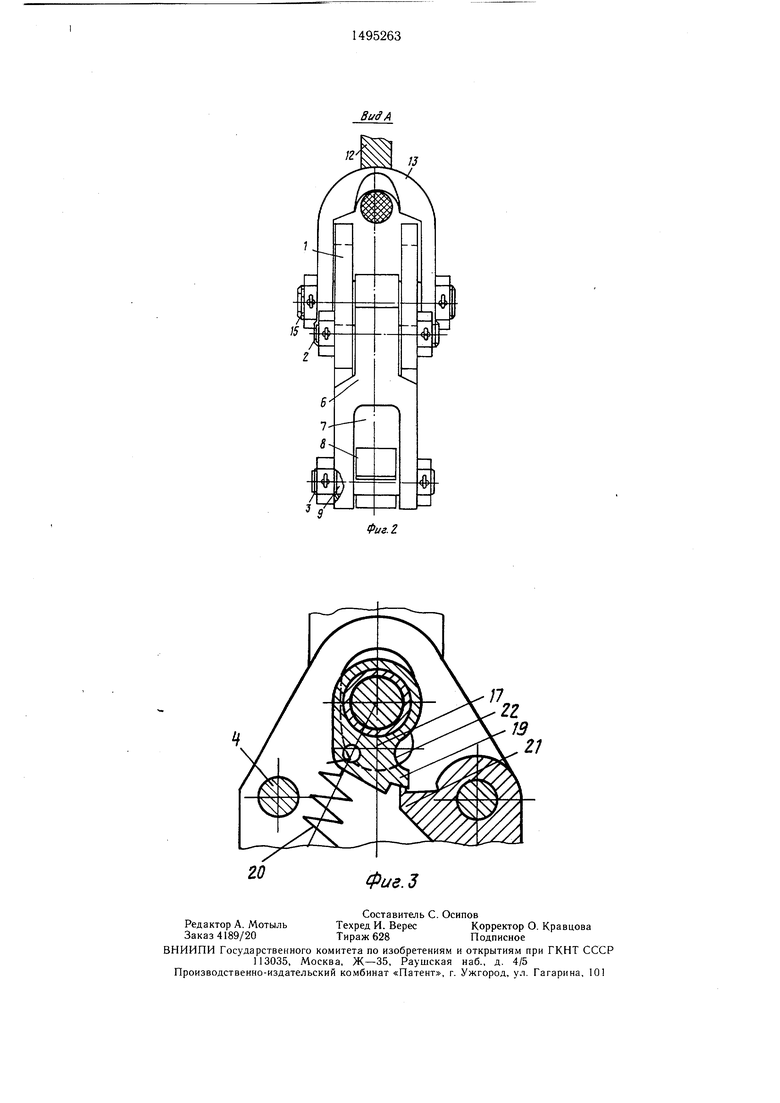
Изобретение относится к подъемно-транспортному оборудованию ,в частности, к самоотцепляющимся грузозахватным устройствам. Цель изобретения - упрощение конструкции, повышение технологичности изготовления и снижение материалоемкости. Основными элементами устройства являются корпус в виде щек 1, толкатель, фиксатор 6, грузовая скоба 5. При подъеме груза носок 8 грузовой скобы 5 размещен на оси 9 фиксатора 6. Ось 15, на которой установлен толкатель, расположена в верхней части паза 14. Зубчатый упор 19 толкателя располагается над выступом 21 фиксатора 6. После установки груза на площадку нагрузка со скобы 5 снимается. При дальнейшем опускании устройства зубчатый упор 19 толкателя, воздействуя на выступ 21 фиксатора 6, поворачивает его против часовой стрелки. Ось 9, перемещаясь по скосу 10, выходит из выемки носка 8 грузовой скобы 5. По окончании выхода грузовая скоба 5 под действием силы тяжести поворачивается по часовой стрелке, освобождая тем самым зев устройства. После соскакивания зубчатого упора 19 с выступа 21 фиксатор 6 занимает вертикальное положение. Выступ 21 при этом располагается в выемке. 3 ил.
Фиг.З
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1379226A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
