Изобретение относится к подъемно- транспортной технике, а именно к грузозахватным устройствам для листовых материалов.
Цель изобретения - повышение надежности работы.
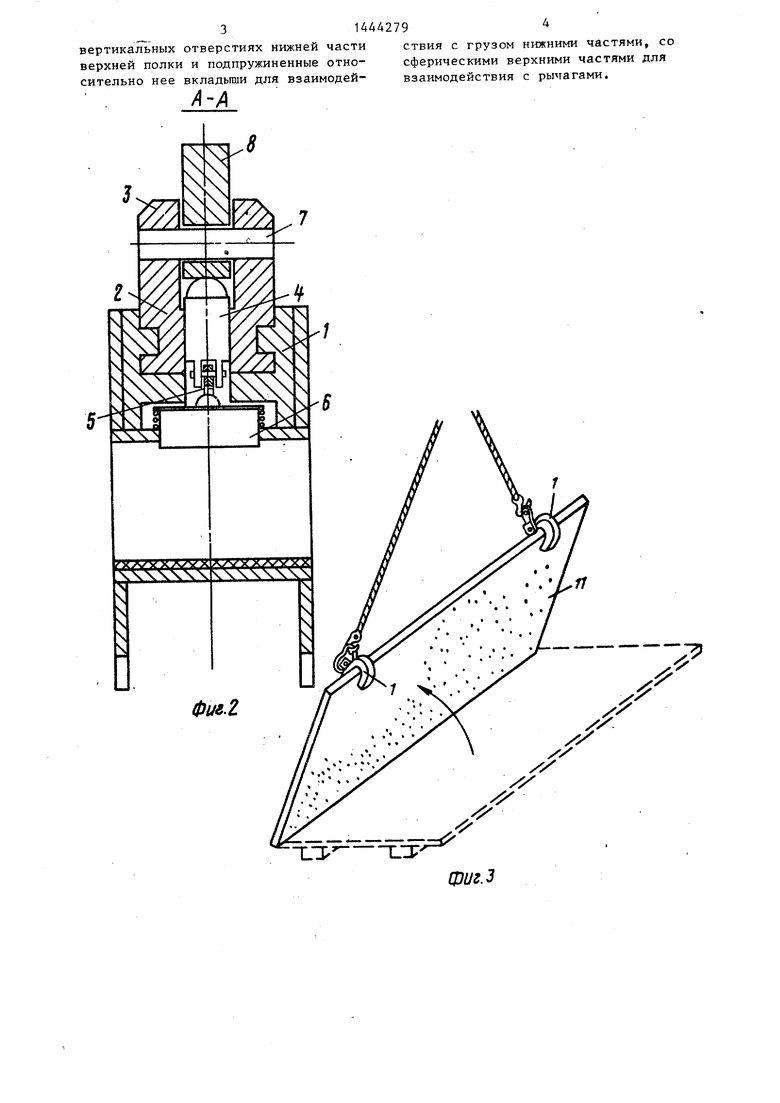
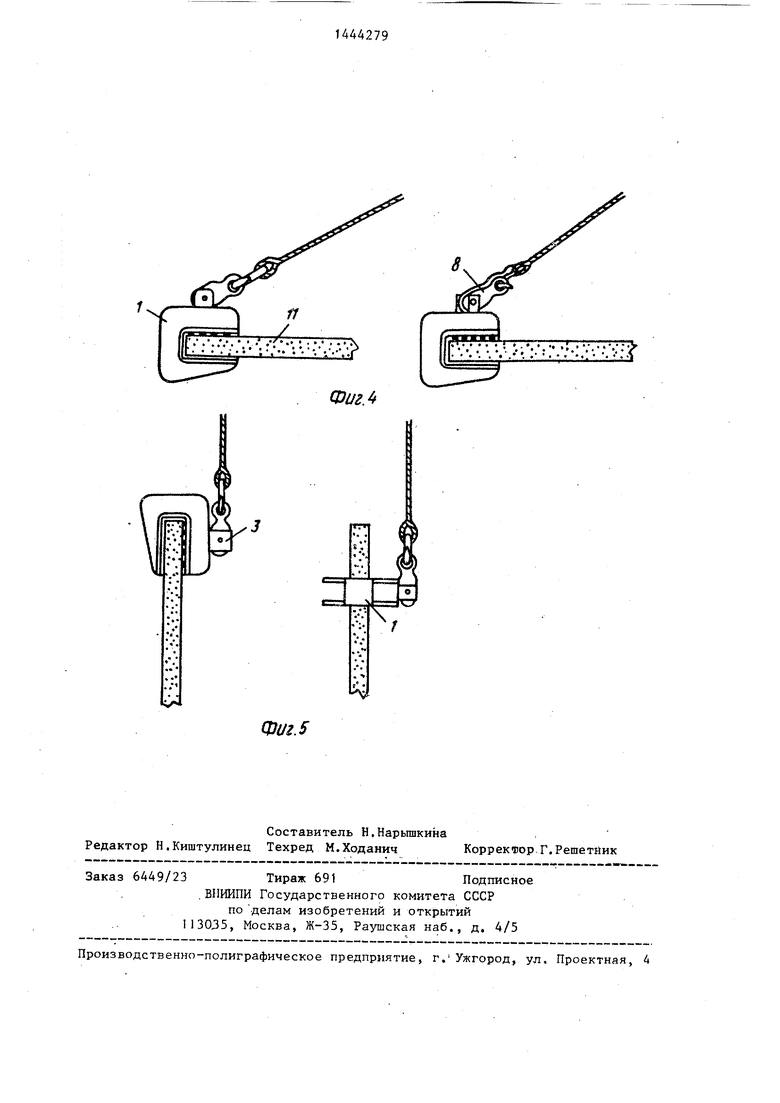
На фиг.1 изображен захват, общий вид; на фиг.2 - разрез А-А на фиг,1; на фиг.З кантование изделия; на фиг.4 - подъем изделия в горизонталь- ком положении на фиг«5 - то же, в вертикальном положении.
Предлагаемый захват состоит из корпуса 1, в верхней части которого шаряирно закреплена втулка 2 со щеками 3. Во внутреннем отверстии втулки 2 проходит стержень 4} имеющий вверху Сфер1гческую головкуs а внизу шарнирно соединен с рычагами 5, которые кон- тактируют с отдельно установленными в корпусе подпружиненными вкладышами 6. К щекам крепится на оси 7 ры чаг 8, причем ось проходит через отверстие 9 в виде овала эксцентрикового рычага 8, контактирующего со стержнем 4. Один конец эксцентрикового рычага 8 имеет криволинейную поверхность, а другой заканчивается проушиной с отверстием для строповки чалочным крюком грузоподъемного приспособления. Пружины 10 предназначены для возвращения вкладышей 6 в исходное положение после снятия нагрузки от веса поднимаемого изделия 11 и при переводе рычага по отверстию 9 вверх.
Захват работает следующим образом.
В зев корпуса 1 захвата заводят изделие 11, после чего в отверстие проушины рычага 8 заводится чалочньй крюк грузоподъемного механизма. При натяжении стропов грузоподъемным механизмом рычаг 8 за счет шарнирно закрепленной втулки 2 самоориентиру- ется в сторону приложения подъемного усилия, создаваемого натяжением нет- йей стропов. При горизонтальном 1гри- ложении подъемного усилия по отношению к корпусу 1 захвата рычаг 8 своим отверстием 9 в виде овала скользит по оси 7, опускаясь и давя на сферическую головку стержня 4, который че- аез рычаги 5 передает зажимное усилие на отдельно стоящие подпружиненные вкладьш и 6, которые, опускаясь, зажимают поднимаемое изделие 11. При приложении подъемной силы под углом к горизонтальной плоскости или перпен
Q
5 0 5
О 5 g
0
дикулярно к ней рычаг 8 описывает вращательно-поступательное движение. По мере натяжения стропов рычаг 8 начинает вращаться относительно оси 7, нажимая на сферическую головку стержня 4, и постепенно скользит овальным отверстием 9 по оси 7, занимая устойчивое положение (когда ось займет верхнее положение в отверстии 9) о
Таким образоМ} при любой пространственной ориентации подъемного усилия, создаваемого натяжением стропов, а .также при изменяющейся его направ- «пенности в процессе подъема изделия обеспечивается надежность работы захвата.
При расстроповке необходимо повернуть рычаг 8 вниз и сместить его по овальном17 отверстию 9 вверх. Под действием пруж1-1ны 10 зажимные элементы- вкладыши поднимутся вместе с рычагами 5 и стержнем 4,
Формула изобретения
Грузозахватное устройство, содержащее скобообразный корпус, закреп- ленкьй на горизонтальной оси эксцентриковый рычаг с проушиной на одном конце и торцовой криволинейной поверхностью на другом конце, прижимной орган, установленный в корпусе о т - личающееся тем, что, с целью повышения надежности работы, в верхней полке корпуса выполнены в верхней ее части вертикальное отверстие, в средней ее части - по-; лость, сопряженная с ним, и в ниж- .ней части - ряд вертикальных отверстий, а устройство снабжено втулкой, установленной в упомянутом вертикальном отверстии с возможностью поворота вокруг вертикальной оси, жестко закрепленными на верхнем торце втулки вертикальными щеками с отверстиями, в которых расположена горизон- тальная ось эксцентрикового рычага, при этом прижимной орган включает установленный во втулке стержень, верхняя часть которого выполнена сферической для взаимодействия с торцовой криволинейной и боковыми поверхностями эксцентрикового рычага, установленные в полости верхней полки С-образного корпуса рычаги, связанные одними концами посредством горизонтальной оси между -собой и с нижним концом стержня, и расположенные в
31444279
вертикальных отверстиях нижней части ствия с грузом нижними частями, со верхней полки и подпружиненные отно- сферическими верхними частями для сительно нее вкладыши для взаимодей- взаимодействия с рычагами.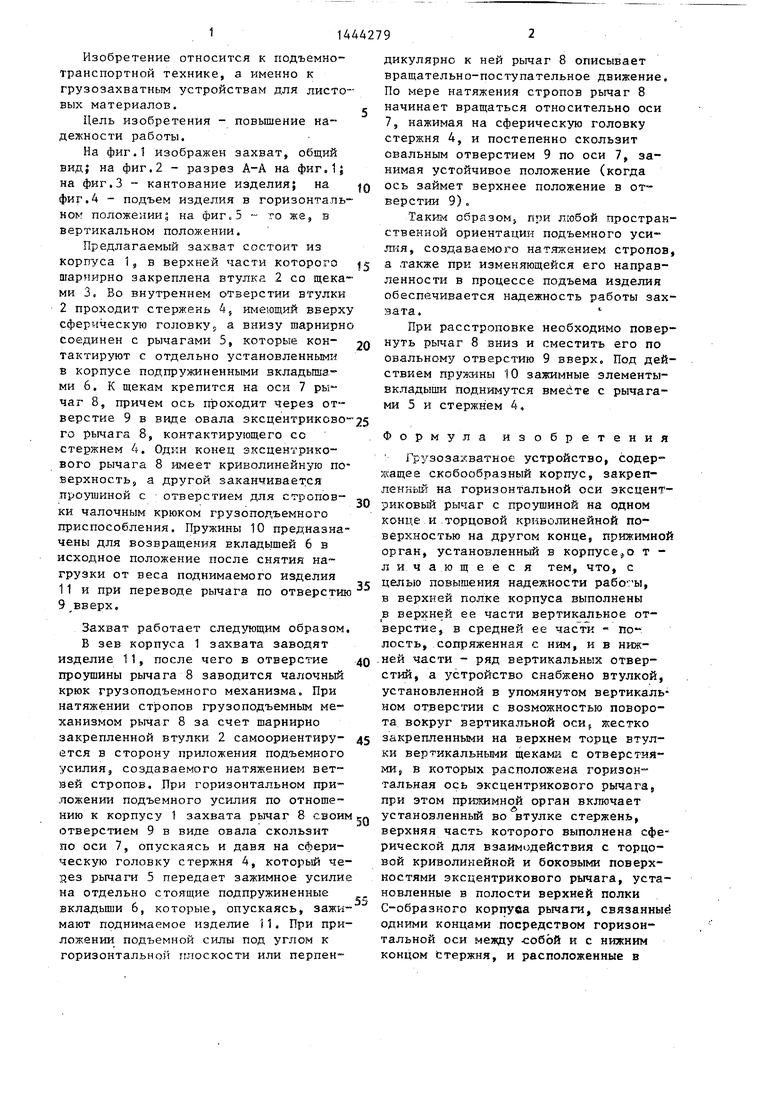
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1987 |
|
SU1518270A1 |
| Строповочный узел грузозахватного устройства | 1990 |
|
SU1754625A1 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| Вилочный захват для штучных грузов | 1987 |
|
SU1418259A1 |
| СИСТЕМА Ю.Н.КУНГУРЦЕВА ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2033371C1 |
| ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ | 1991 |
|
RU2048419C1 |
| Захватное устройство | 1982 |
|
SU1105445A1 |
| Грузозахватное устройство | 1990 |
|
SU1757986A1 |
| ТРАВЕРСА | 1991 |
|
RU2026257C1 |
| Грузозахватное устройство | 1988 |
|
SU1572978A1 |
Изобретение относится к подъемно-транспортной технике, а именно к грузозахватным устройствам для листовых материалов. Целью изобретения Фиг1 является повышение надежности работы устройства. Грузозахватное устройство для листовых материалов содержит корпус 1, в верхней части которого с помощью втулки 2 установлен стержень 4, взаимодействующий сферической головкой со сферической поверхностью эксцентрикового рычага 8, причем рычаг имеет овальное отверстие 9, в котором установлена ось 7, закрепленная на щеках корпуса 1. Нижняя часть стержня 4 воздействует с помощью рычагов 5 на подпружиненные вкладьши 6, работающие независимо друг от друга и установленные в отверстиях корпуса 1. 5 ил. .S 4 4 4 Гч5 СО
тл
-LT
-LT
фиг.
Фиг.
Фиг.5
| Авторское свидетельство СССР № 914475, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
