(54) ДОМКРАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 2005 |
|
RU2311624C2 |
| Транспортное средство со съемным контейнером | 1986 |
|
SU1393684A1 |
| Гидравлический домкрат для вертикального и горизонтального перемещений грузов | 1977 |
|
SU679516A1 |
| Устройство для изготовления обрезиненного кордного полотна | 1973 |
|
SU539510A3 |
| ИЗОБРЕТЕНИЯ | 1973 |
|
SU363599A1 |
| ; ВСЕСОЮЗНАЯ | 1973 |
|
SU373252A1 |
| Стенд для правки кузовов | 1982 |
|
SU1061881A1 |
| Устройство для демонтажа и монтажа деталей винторулевого комплекса судна | 1985 |
|
SU1320119A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ САМОХОДНОЙ ТЕХНИКИ НА ЖЕЛЕЗНОДОРОЖНУЮ ПЛАТФОРМУ | 2006 |
|
RU2312779C1 |
| СПОСОБ ПЕРЕВОДА БАШЕННОГО КРАНА С ПРОДОЛЬНОГО РЕЛЬСОВОГО ПУТИ НА ПОПЕРЕЧНЫЙ РЕЛЬСОВЫЙ ПУТЬ И ХОДОВАЯ ЧАСТЬ БАШЕННОГО КРАНА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2371373C1 |
1
Изобретение относится к грузоподъемным устройствам для вертикального и горизонтального перемещения грузов и может быть использовано на монтажных работах при установке и выверке различного технического оборудования, стыковке его отдельных частей и агрегатов.
Известен домкрат, содержащий неподвижную стойку, установленную на опорной плите, и перемещающийся по ней подвижный элемент, несущий щарнирно закрепленный на нем съемный боковой захват, с поворотным рабочим органом, взаимодействующим с грузом, а также привод 1...
Такие домкраты не обеспечивают горизонтального перемещения грузов и в процессе их работы создается больщой опрокидывающий момент.
Цель изобретения - повыщение устойчивости домкрата путем исключения передачи на него опрокидывающего момента.
Поставленная цель достигается тем, что съемный боковой захват снабжен регулируемым ограничителем его поворота относительно подвижного элемента.
2
Рабочий орган снабжен регулируемым ограничителем его поворота относительно захвата.
С целью обеспечения горизонтального перемещения домкрата опорная плита снабжена ходовой частью, содержащей установленные в гнездах плиты щары и по крайней мере один фиксатор положения домкрата на горизонтальной плоскости, а щары ходовой части установлены на щариках.
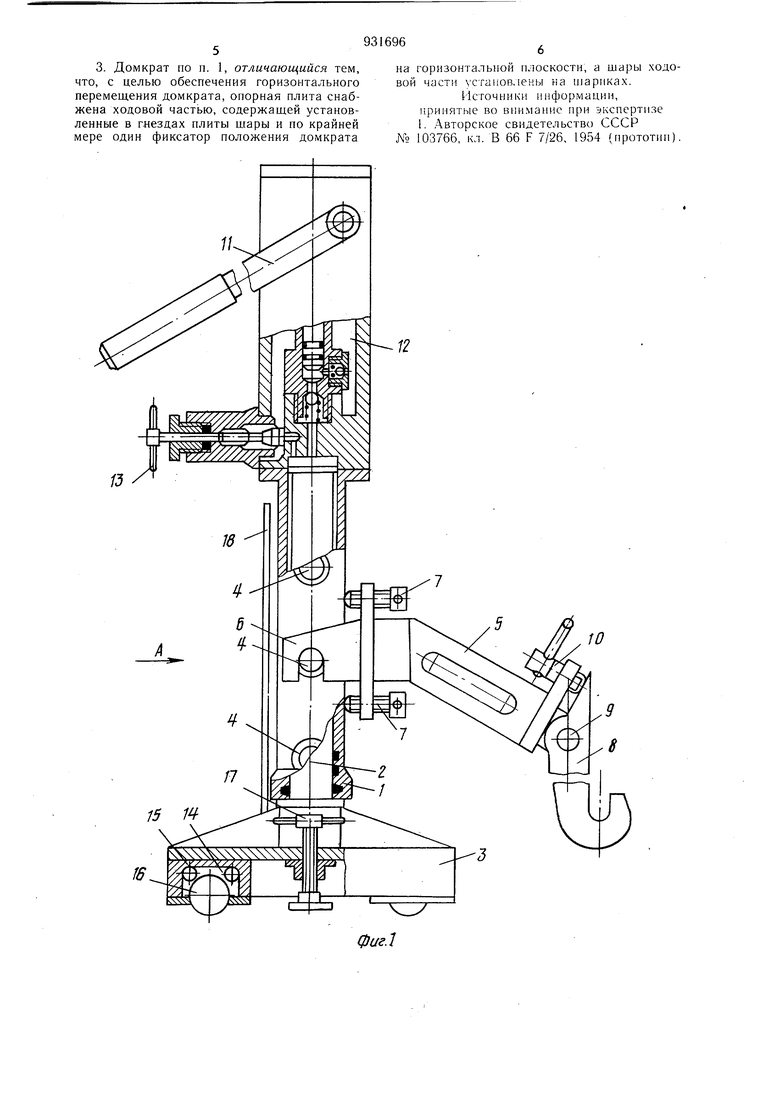
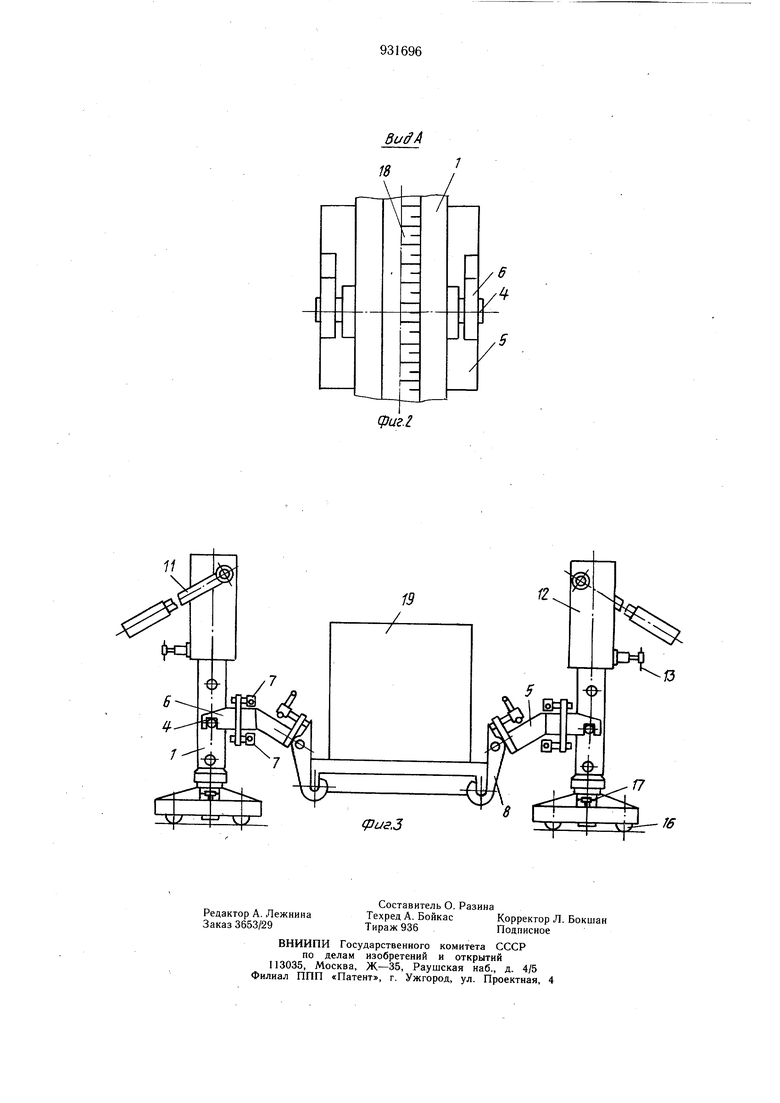
На фиг. 1 показан домкрат с встроен10ным ручным насосом,вариант; на фиг. 2 - вид А на фиг. 1; на фиг..З - схема групповой работы домкратов.
Домкрат состоит из подвижного элемента 1, неподвижной стойки 2, установленной на опорной плите 3. В нижней части элемента 1 с двух сторон имеются щтифты 4, на которых закреплен щарнирно съемный боковой захват 5. В его щеках 6 выполнены пазы. Захват 5 снабжен регулируемым . ограничителем его поворота относительно элемента 1 в виде винтов 7 и рабочим органом 8 для взаимодействия с грузом. Рабочий орган 8, прикрепленный к захвату 5 через щарнир 9, снабжен регулируемым ограничителем поворота относительно захвата 5, выполненным в виде винта 10.
В верхней части элемента 1 находится насос с приводным рычагом 11, резервуаром 12 и перепускным вентилем 13. В опорной плите 3 выполнено четыре гнезда 14, в которых на шариках 15 установлены ходовые шары 16. В плите 3 имеется два фиксатора 17 для фиксации положения домкрата на горизонтальной плоскости.
В тнезда 14 может быть вложен кольцеобразный фитиль - сальник для смазки шариков 15 и шаров 16 и защиты их-от загрязнения.
К неподвижной в вертикальном направлепиии части домкрата (к опорной плите) прикренлепа мерная линейка 18 для ориентиро1К) определения относительной высоты подъема.
Домкрат работает следуюшим образом.
Домкраты (два и более) ставят рядом с грузом 19. Под груз подводят рабочий S (в данном случае выполненный в виде крюка) захвата 5, пазами в щеках 6 захвата надевают последний на подходящие Ир; высоте два штифта 4 элемента 1 и рычагом 11 одпи.м-двумя качками подтягивают рабочий орган (крюк) 8 плотно к его посадочному месту на грузе. При этом захват 5 должен оказаться свободно висящим пазами в щеках 6 на щтифтах 4, для чего регулировочными винтами 7 и элементом 1 должен быть установлен зазор I-2 мм. В таком случае исключается создание опрокидывающего домкрат момента, так как система груз-захваты представляет собой жесткую балку, опертую И1арнирно на домкратах. Рычагом 11 качками осуществляют подъем груза на нужную высоту. Затем вывешенный груз может быть пере.мещеп вместе с домкратами в любом из горизонтальных направлений подталкиванием его вручную, иодрычаживанием или используя тяговое усилие какого-либо из средств механизации в зависимости от массы груза. В момент трогания домкратов вместе с грузом в горизонтальном направлении перпендикулярно оси щтифтов 4, на которые опирается захват 5 щеками 6, может возникнуть незначительный опрокидывающий момент за счет сопротивления качению ходовы.х щаров 16. Однако благодаря малому зазору между винтами 7 и эле.ментом 1 этот незначительный опрокидывающий мо.мент, гасится (один из винтов 7 упирается в элемент 1 и выводит домкрат в устойчивое положение). Опускание груза осуществляется перепуско.м рабочей жидкости из элемента 1 в резервуар 12 вентилем 13.
При слабой несущей способности пола, на который устанавливается домкрат, последний может быть установлен на металлическую пластину (подстил), положенную на пол.
В случае необходимости фиксирования положения домкрата на горизонтальной плоскости ручкой фиксатора 17 осуществляется его завинчивание до упора к полу или металлическому настилу, на который установлен домкрат. При группойой работе домкратов и необходимости фиксации груза фиксируют положение двух или более домкратов, при развороте груза фиксируют один домкрат, вокруг которого осуществляется поворот.
Когда груз расположен высоко, домкрат .может быть подведен под груз (при условии обеспечения безопасности работающих). В этом случае обеспечивается вертикальное перемещение груза, в качестве опорной пяты может использоваться часть эле.мента 1.
Для одностороннего подъема груза на небольшую высоту может быть использован один домкрат, при этом противоположная
0 сторона груза должна опираться на основание. Высота подъема груза в этом случае определяется предельным положением регулировочных винтов 7.
Предлагаемый домкрат прост по конструкции, компактен и устойчив, имеет
5 значительно более широкие функциональные возможности, чем существующие домкраты для вертикального перемещения, а также домкраты для вертикального и горизонтального перемещений грузов. Кроме того, он обеспечивает захват низко расположенных грузов без подвода под них его, в том числе и грузов, расположенных ниже плоскости установки самого домкрата, обеспечивает хорошую маневренность в горизонтальных направлениях, а также безопасность работающих. Им могут быть выполнены и трудоемкие операции по перемещению технологического оборудования при его установке, выверке стыковке, которые в настоящее время выполняются вручную из-за отсутствия подходящих
средств механизации.
Формула изобретения
и перемещающийся по ней подвижный элемент, несущий щарнирно закрепленный на нем съемный боковой захват с поворотным рабочим органом, взаимодействующим с грузом, а также привод, отличающийся тем, что, с целью повышения устойчивости домкрата путем исключения передачи на него опрокидывающего момента, съемный боковой захват снабжен регулируемым ограничителем его поворота относительно подвижного элемента.
на горизонтальной плоскости, а шары ходовой части установлены на шариках.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР jYo 103766, кл. В 66 F 7/26, 1954 (прототип).
6
Ц
