Изобретение относится к устройст вам полуавтоматического рулевого управления траекторией движения и может быть применено в колесных транспортных средствах. Известно устройство автоматической коррекции траектории .движения транспортного средства, содержащее датчик угла поворота рулевого колеса, датчик .продольной составляющей линейной скорости, блок умножения, первый вход которого соединен с выходом датчика угла поворота рулевого колеса, а второй - с выходом датчика продольной со ставляющей линейной скорости, первый блок сравнения с двумя входами, первый вход которого соединен с выходом блока умножения, и исполнительный механизм первой пары управляемых колес, кинематически связанный с управляемыми колесами tl}. Измеренная таким устройством yi- ловая скорость разворота будет отличаться 6т ее истинного значения ,мз-за неоднозначности реакции транспортного средства на управляющие воздействия и невозможности заложить точную модель увода и проскальзывания шин при различных условиях. Кроме того, при наличии поперечного поступательного сноса такое устройство не корректирует траекторию транспортного средства. Цель изобретения - улучшение управляемости транспортного средства путем повышения точности коррекции траектории его движения. Цель достигается тем, что устройство снабжено датчиком угловой скорости, датчиком поперечной составляющей линейной скорости, вторым блоком сравнения, сумматором и исполнительным механизмом второй пары управляемых колес, причем ось чувствительности датчика угловой скорости установлена перпендикулярно плоскости дороги, а его выход соединен с вторым зходом первого блока сравнения, пер
вый вход второго блока сравнения связан с выходом первого блока сравнения, а второй его вход - с выходом датчика поперечной составляющей линейной скорости, выход второго блока сравнения соединен с входом исполнительного механизма первой пары управляемых колес, первый вход сумматора связан с выходом первого блока сравнения, второй вход сумматора с выходом датчика поперечной составляющей линейной скорости, а выход сумматора - с исполнительным механизмом второй пары управляемых колес.
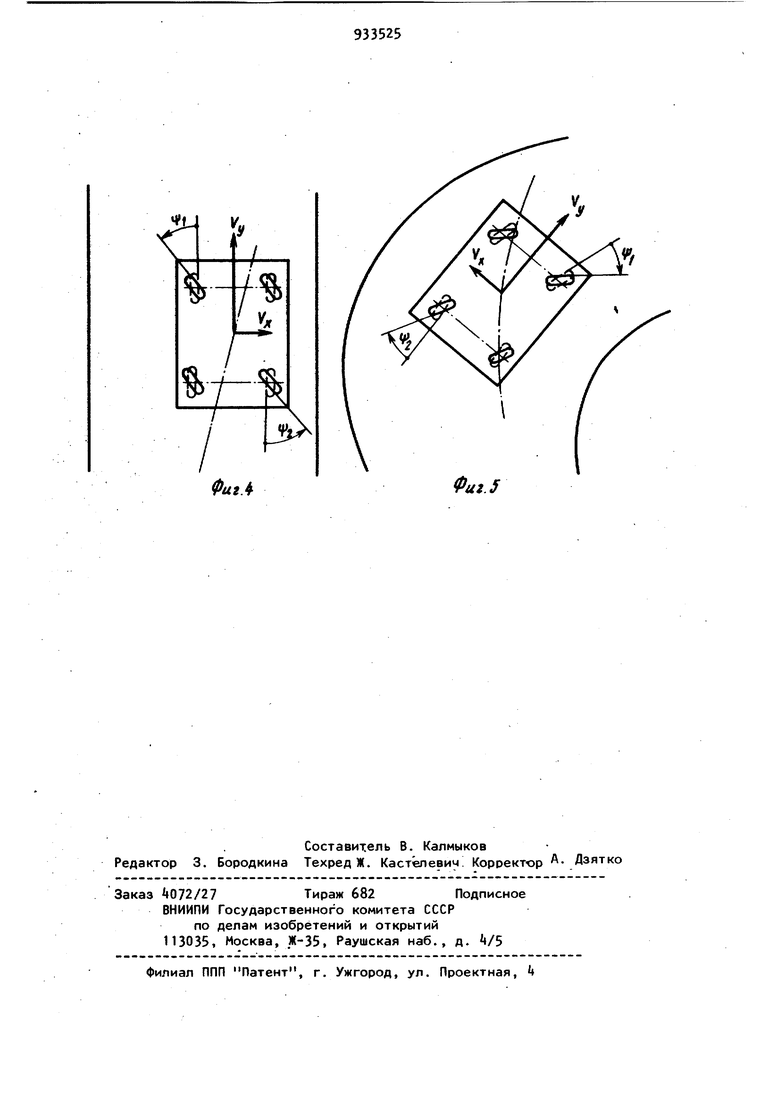
На фиг, 1 изображена блок-схема устройства автоматической коррекции траектории движения колесного транспортного средства-, на фиг. 2 - 5 принцип действия устройства при различных режимах движения.
Блок-схема устройства автоматической коррекции траектории движения ;р.одержит датчик 1 угла поворота рулевого колеса 2, датчики 3 и А продольной составляющей Vv и попере.чной составляющей N/x линейной скорости транспортного средства соответственно. В качестве таких датчиков может быть использован, например, доплеровский измеритель линейной скорости. Блок 5 умножения связан одним из своих входов с выходом датчика 1, а другим - с выходом датчика 3. Датчик 6 угловой скорости, в качестве которого может быть использован осцилляторный вибрационный гироскоп5 установлен неподвижно на шасси транспортного средства так, что его ось чувствительности перпендикулярна плоскости дороги.
Первый блок 7 сравнения соединен одним входом с датчиком 6, а другимс блоком 5. Исполнительный механизм 8 первой пары управляемых колес, например передних, связан входом с выходом второго блока 9 сравнения, со входами которого соединены выход блока 7 и выход датчика 4. Исполнительный механизм 10 второй пары управляемых колес, например задних соединен входом с выходом сумматора 11, со входами которого соединены выход датчика 4 и выход блока 7.
Устройство работает следующим образом.
При наличии поворота рулевого колеса с датчика 1 на первый вход блока 5 поступает сигнал, пропорциональный углу поворота Ч, а на второй
его вход - сигнал, представляющий продольную составляющую Vv линей ной скорости, снимаемый с датчика 3. Так как желаемый радиус поворота транспортного средства обратно пропорционален углу Ч, то с выхода блока 5 снимается сигнал, представляющий желаемую угловую скорость разворота -0 К MVv , и в блоке 7 сравнивается с ее измеренным значением U). Если занос и поперечный снос транспортного средства отсутствуют, т.е. Uj- ио., и УХ 0, на механизмы 8 и 10 не поступают сигналы. При наличии заноса на повороте (фиг. 2 и 3) Vx О, а ии . Приняв за положительное направление поворот против часовой стрелки, получают , что в случае, изображенном на фиг. 2, сигнал на выходе блока 7 (V и подается в противофазе на исполнительные механизмы В и 10 управляемых колес, получающие приращения углов поворота V., и Vij соответственно, причем Ц О, Такой поворот управляемых колес уменьшает разность между измеренной и желаемой угловыми скоростями до тех пор, пока выходной сигнал блока
7не станет равным нулю. В случае правого поворота с заносом (фиг.З) Vy О, а на выходе блока 7 появляется отрицательный сигнал
Чо -uj,0, при этом ,
8остальном работа предлагаемого устройства аналогична работе в рассмотренном случае. При поступательном движении транспортного средства с правым боковым сносом (фиг. )
4 О, О, Ш 0,, сигнал снимаемый с выхода блока 7 равен нулю. Сигнал, снимаемый с датчика +, подается на механизмы 8 и 10 управляемых колес с одинаковой фазой, т.е приращения углов поворота Ч Такой поворот управляемых колес уменьшает величину поперечной составляющей линейной скорости до тех пор, пока выходной сигнал датчика не станет равным нулю. Если движение транспортного средства при правом повороте сопровождается заносом и левым поперечным сносом одновременно
(фиг. 5) , то Vy 0,U) 0.
При
этом выходные сигналы сумматора 11 и блока 9, имеющие различные абсолютные величины, подаются на механизмы 8 и 10 управляемых колес, которые получают приращение угла по5ворота на величины и , причем I / IЦ I . На входах этих механизмов будут отличающиеся от ну сигналы до тех пор, пока выходные сигналы блока 7 и датчика 4 не станут равными нулю. В результате повышения точности коррекции траектории движения транспортного средства повышается безопасность его движения, сводится до минимума влияние неоднозначности ре акции транспортного средства на управляющие воздействия, снижаются нагрузки на водителя. Формула изобретения Устройство автоматической коррек ции траектории движения колесного транспортного средства, содержащее датчик угла поворота рулевого колеса, датчик продольной составляющей линейной скорости, блок умножения, первый вход которого соединен с выходом датчика угла поворота рулевого колеса, а второй - с выходом датчика продольной составляющей линейной скорости, первый блок сравнения с двумя входами, первый вход которого соединен с выходом блока умножения, и исполнительнь1Й механиз первой пары управляемых колес, кине матически связанный с управляемыми 5 колесами, отличающееся тем, что, с целью улучшения управляемости транспортного средства путем повышения точности коррекции траектории его движения, устройство снабжено датчиком угловой скорости, датчиком поперечной составляющей линейной скорости, вторым блоком сравнения, сумматорой и исполнительным механизмом второй пары управляемых колес, причем ось чувствительности латчика угловой скорости установлена перпендикулярно плоскости дороги, а его выход соединен с вторым входом первого блока сравнения, первый вход второго блока сравнения связан с выходом первого блока сравнения, а второй его вход - с выходом датчика поперечной составляющей линейной скорости, выход второго блока сравнения соединен с входом исполнительного механизма первой пары управляемых колес, первый вход сумматора связан с выходом блока сравнения, второй вход сумматора - с выходом датчика поперечной составляющей линейной скорости, а выход сумматора - с исполнительным механизмом второй пары управляемых колес. Источники информации, принятые во внимание при экспертизе 1. Патент США Н , кл. 180-79.2, 1977 (прототип).
/
/
V-У

Vi
Фаг4
