Изобретение относится к области транспортного машиностроения и может быть использовано при синтезе систем управления поворотом быстроходных гусеничных машин (БГМ), оснащенных гидромеханической трансмиссией (ГМТ) и дифференциальным механизмом поворота с гидрообъемным приводом.
Высокий уровень удельных мощностей, установка современных агрегатов системы "двигатель-трансмиссия-ходовая часть" позволяют получить высокие расчетные значения максимальных и средних скоростей движения гусеничных машин на местности. Однако реализация технических возможностей, заложенных в конструкцию гусеничных машин, существенно ограничивается их низкой управляемостью, склонностью к заносу, особенно при движении на высоких скоростях.
Система управления существующих гусеничных машин представляет собой совокупность механизма поворота и приводов управления, с помощью которых водитель осуществляет управление машиной. Например, система управления поворотом боевой машины пехоты БМП-3 (Боевая машина пехоты БМП-3. Руководство по эксплуатации. Ч.1. Техническое описание. - Ростов-на-Дону: Изд-во ООО БелРусь, 2010 г. - рис.6.6 стр.295, рис.7.5 стр.327-329) содержит управляемый командным органом (штурвалом) гидрообъемный привод, ведущий вал гидронасоса которого соединен с двигателем, а ведомый вал гидромотора соединен с валом дифференциального механизма поворота. На валу расположены шестерни, кинематически соединенные с солнечными шестернями СПР одного борта БГМ через промежуточную шестерню, а второго борта - непосредственно.
Водитель, воздействуя посредством приводов управления на гидропривод, изменяет режим его работы и тем самым изменяет направление движения машины. При этом контроль за поведением машины осуществляет водитель. Для компенсации возникающих отклонений траектории водитель воздействует на органы управления, пытаясь реализовать требуемую траекторию движения с необходимой для безопасности точностью. Однако вследствие ограниченности психофизиологических свойств водителя, его утомляемости в процессе длительного движения, принятые решения и реализуемое им управляющее воздействие характеризуется большим количеством ошибок.
В связи с тем, что значительную часть времени движения машины составляет криволинейное движение, одним из путей повышения средней скорости движения и снижения уровня требований к квалификации водителя и его утомляемости является автоматизация управления движением машины в повороте. При разработке системы, обеспечивающей контроль поведения машины при движении в повороте, и при возникновении угрозы потери управления движением требуется автоматически ограничивать скорость и тем самым предотвращать занос.
Рассматриваемый класс машин и соответствующие системы управления должны отличаться высоким уровнем надежности и живучести при эксплуатации в экстремальных условиях. В связи с этим, управление структурными составляющими машинами должно осуществляться по двум каналам управления. Для управления по первому каналу используются только механические и механогидравлические устройства. Структура такой «базовой» системы управления движением характеризуется минимальной сложностью. По второму каналу управления реализуется некоторая надстройка «базовой» системы управления движением, которая реализует интегрированную функцию автоматического управления движением БГМ, с использованием современных технологий получения и обработки информации.
Основная трудность в разработке второго канала управления такой системы заключается в выборе параметров, по которым бы контролировалось поведение машины при повороте. Искомые параметры должны правильно отражать физическую суть процессов, протекающих при движении машины. Также, большое значение имеет простота определения данных параметров, так как это будет определять уровень сложности и надежности работы системы.
В результате проведенных теоретических исследований определено, что величины расчетной угловой скорости поворота машины, определяемой скоростями вращения гусениц, и фактической угловой скорости отличаются за счет скольжения гусениц. При достижении скорости движения гусеничной машины предельной по управляемости угловые скорости поворота близки по значению друг к другу. То есть, при возникновении угрозы заноса отношение угловых скоростей стремится к единице.
В соответствии с приведенным предложена автоматизированная система управления поворотом БГМ по патенту РФ 2158682 МПК В60К 41/00 от 10.11.2000 (аналог). Эта система содержит гидрообъемную механическую передачу и исполнительные приводы управления этой передачей, датчики частоты вращения гусениц правого и левого бортов, блок конструкционных параметров, датчик угловой скорости поворота гусеничной машины, блок вычисления теоретической угловой скорости поворота машины, блок деления, компаратор, блок опорного сигнала, исполнительный механизм.
Анализируемая система управления поворотом работает следующим образом. При движении машины сигналы от датчиков частоты вращения гусениц правого и левого бортов поступают в блок вычисления расчетной угловой скорости поворота гусеничной машины и затем в блок деления. В этот же блок поступает сигнал от датчика угловой скорости поворота машины, где рассчитывается отношение значений расчетной и фактической угловых скоростей поворота машины. Далее сигнал поступает в компаратор, где сравнивается с опорным сигналом, поступающим из блока опорного сигнала. Если величина сигнала из блока деления равна или меньше величины опорного сигнала, то компаратор выдает сигнал управления на исполнительный механизм привода изменения режима работы двигателя, уменьшающего частоту вращения вала двигателя до тех пор, пока не пропадет сигнал от компаратора. Блок конструкционных параметров служит для ввода конструкционных параметров машины, необходимых для расчета теоретической угловой скорости поворота машины.
Однако возможность стабилизации движения БГМ в повороте с такой системой ограничена, хотя система реализуется при минимуме сложности сенсорной части. Как показывают результаты экспериментального исследования динамики управляемого движения БГМ, в повороте нельзя снижать частоту вращения вала двигателя, необходимо двигаться на повышенном скоростном режиме его работы. Это связано с тем, что при уменьшении частоты вращения вала двигателя до порогового значения, при котором происходит разблокировка гидротрансформатора, снижается частота вращения эпициклов суммирующих планетарных рядов. В этих условиях поворот машины происходит с «закручиванием» траектории в спираль, т.е. еще большему отклонению траектории от требуемой. Это определяется в силу свойств системы управления поворотом гидрообъемным приводом - при снижении скорости возрастает чувствительность кривизны траектории к управляющему воздействию. Таким образом, для обеспечения эффективного управления необходимо определять не только отношение угловых скоростей, но и соответствие кривизны траектории движения. Эту функцию система выполнить не может.
Предотвращение заноса может быть обеспечено компенсирующим управлением водителя или автоматизированной системы по регулированию угловой скорости и кривизны при одновременном торможении машины. Однако в процессе торможения вращение ведущих колес обоих бортов происходит синхронно, а чувствительность машины компенсирующему управлению поворота в этом режиме равна нулю. Сокращение частоты вращения вала двигателя снижает и значение заданной угловой скорости поворота в соответствии со свойствами гидропривода, что так же увеличивает отклонение от траектории.
Особенности функциональной зависимости параметров кривизны k от угла поворота штурвала αшт, номера включенной передачи mj, передаточного отношения iгт гидротрансформатора (ГТ)-k=k(αшт, mj, iГТ) и угловой скорости ω от αшт, угла положения педали подачи топлива αпт, частоты вращения вала двигателя n∂-ω=ω(αшт, αпт, n∂) БГМ с двухпоточной ГМТ, в которой гидрообъемный привод системы управления поворотом (СУП) осуществляется от двигателя, приводят к тому, что при перегрузке двигателя падает n∂ и автоматически разблокируется ГТ. В этом режиме уменьшается угловая скорость поворота машины ω≠ω(αшт), увеличивается кривизна траектории k≠k(αшт), не компенсируемая обратной связью, так как αшт→max, αпт→max, αт=0.
Это приводит к движению БГМ по спиралевидной траектории. Внешне движение БГМ подобно заносу, однако вызвано другими причинами, может происходить при ограниченной скорости и требует компенсирующего управления, отличающегося от заноса. Однако мониторинг и идентификацию этого режима известная система осуществить не может.
Наиболее близкой по технической сути и достигаемому результату является система стабилизации движения автомобиля фирмы Bosch ESAS, ESP® plus, ESP® premium [Konrad Reif (Hrsg). Bremsen und Bremsregelsysteme. Bosch Fachinfbrmation Automobil. - Berlin: Vieweg + Teunber, 2010. - Bild. 2,3 s.121-122]. Эта система включает так называемый сенсор G параметров бокового движения (угловой скорости поворота автомобиля и его бокового ускорения), датчики угловой скорости вращения колес, положения рулевого колеса, датчики давления в тормозной системе, частоты вращения вала двигателя, скорости движения υ, соединенных с электронным блоком контроллера (БК). Выход БК соединен с электронными блоками управления двигателем, коробкой передач, рулевого управления, а также с модуляторами управления давлением в тормозной системе колес.
На основе сигналов датчиков n∂, υ, αшт контроллер определяет требуемый режим движения в повороте (угловую скорость поворота автомобиля и его боковое ускорения). Если параметры движения автомобиля в повороте, определяемые по сигналам G-сенсора, отличаются от заданных (расчетных), то БК осуществляет идентификацию отклонений, например, занос. В зависимости от величины отклонения, БК подает команду на подруливание управляемых колес, притормаживание отдельных колес. Одновременно на блок управления двигателем поступает команда на сокращение подачи топлива, соответственно и уменьшение крутящего момента. При необходимости в АКПП включается более низкая передача или «зимний» режим, если он предусмотрен.
Однако эта система не может стабилизировать движение БГМ. Особенность движения таких машин в повороте состоит в том, что оно сопровождается боковым отклонением траектории. Для измерения величины этого отклонения необходимо два датчика бокового ускорения, устанавливаемых в носовой и кормовой частях корпуса машины. Мерой бокового заноса является превышение бокового ускорения кормовой части корпуса относительно ускорения носовой. В связи с этим в предлагаемую систему вводятся два датчика бокового ускорения, располагаемых в кормовой и носовой частях корпуса.
Таким образом, известной системе стабилизации управляемого движения присущи следующие недостатки:
1. В процессе предотвращения бокового заноса снижать скорость движения торможением гусеничной машины или уменьшением подачи топлива не представляется возможным. Торможение недопустимо, так как в этом режиме может осуществляться только прямолинейное движение. Уменьшение подачи топлива приводит к снижению производительности гидропривода, уменьшению поворачивающего момента и угловой скорости поворота.
2. Управление траекторией движения по соотношению расчетной и фактической угловой скорости поворота недостаточно информативно и не всегда эффективно.
3. Невозможен мониторинг и идентификация режима движения машины по спирали при разблокировке гидротрансформатора.
4. Невозможен мониторинг и идентификация бокового заноса.
Необходимая точность траектории движения, компенсация ошибочных действий водителя обеспечивается предлагаемой системой. Она отличается тем, что в систему управления поворотом дополнительно на ведомый вал трансмиссии, соединяющий автоматическую коробку передач с эпициклами суммирующих планетарных рядов, устанавливается гидрозамедлитель (ГЗ) с электромагнитным клапаном, регулирующим его заполнение. Для предохранения двигателя от перегрузки в процессе торможения предусматривается уменьшение электромагнитным клапаном подачи масла в межлопаточное пространство гидротрансформатора, т.е. его опорожнение, которое направляется в ГЗ. Вход БК соединен с G-сенсором параметров бокового и вращательного движения расширенной номенклатуры (G-сенсора параметров {υ, ω, φ,  ,
,  ,
,  }) движущейся машины; номера включенной передачи mj. Выход БК соединен с электромагнитными клапанами управления наполнением ГЗ и опорожнением гидротрансформатора, фрикциона блокировки гидротраснсформатора (Фбл).
}) движущейся машины; номера включенной передачи mj. Выход БК соединен с электромагнитными клапанами управления наполнением ГЗ и опорожнением гидротрансформатора, фрикциона блокировки гидротраснсформатора (Фбл).
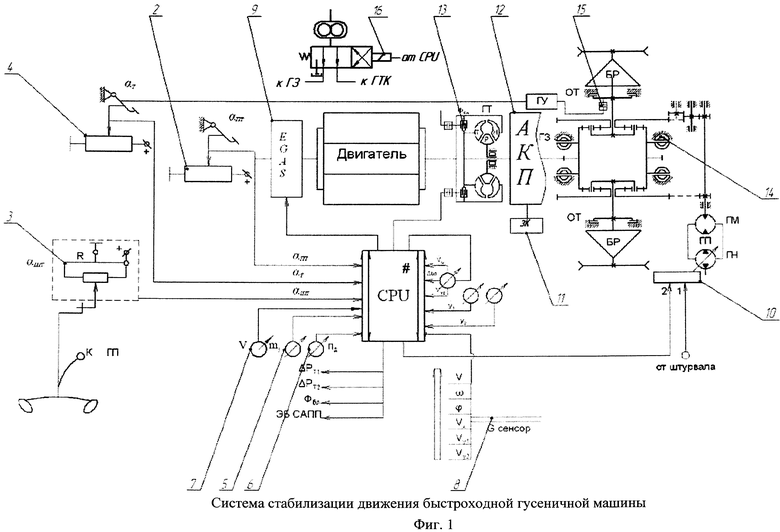
Предлагаемая система стабилизации движения предназначена для БГМ, которая структурно содержит элементы, формирующие управляемое движение: поступательную скорость и направление движения (угловая скорость поворота). К ним относится (Фиг.1) двигатель (Д) с электронным блоком управления подачей топлива E-GAS и педалью подачи топлива αпт. Вал двигателя (Д) соединен с гидротрансформатором (ГТ), оснащенным электромагнитным клапаном ЭМК управления его заполнением, и управлением блокировкой фрикциона Фбл ГТ. Гидротрансформатор расположен на входном валу автоматической коробки передач (АКП), управляемой золотниковой коробкой (ЗК). На ведомом валу АКП расположен дополнительно введенный ГЗ, управляемый ЭМК, бортовым компьютером и педалью тормоза αт через электромагнитный клапан. Ведомые части АКП соединены через суммирующие планетарные ряды СПР, бортовой редуктор БР с ведущими колесами ВК, образуя основной поток мощности. Второй поток мощности образует гидропривод ГП системы управления поворотом СУП. Гидромотор ГП соединен с валом дифференциального механизма поворота. На валу расположены шестерни, кинематически соединенные с солнечными шестернями СПР одного борта БГМ через промежуточную шестерню, а второго борта - непосредственно.
Регулирование угловой скорости поворота БГМ осуществляется угловым перемещением штурвала (αшт), кинематически соединенным с электронным блоком управления гидронасоса ГП. Входной вал гидронасоса гидропривода кинематически соединен с двигателем. На соединительных валах трансмиссии (перед БР) установлены дисковые остановочные тормоза (ОТ), управляемые тормозной педалью (αт) через модулятор давления.
Электрические блоки управления E-GAS, ЗК АКП, ГЗ, ГП СУП, ОТ являются двухканальными и могут управляться как по команде водителя перемещением органов управления движением (αпт, αшт, αт, mj), так и по корректирующему управлению, осуществляемого по сигналам БК.
Система стабилизации управляемого движения БГМ содержит бортовой компьютер (БК) 1, со входом которого соединяются сенсоры положения и перемещения органов управления движением αпт - 2, αшт - 3, αт - 4, mj - 5, скоростного режима работы двигателя n∂ - 6, движения (скорости) υ - 7, а также бортового G 8 сенсора параметров, определяющих вращательное и боковое движение БГМ: угловая скорость (ω), боковое ускорение носовой части ( ), кормовой части (
), кормовой части ( ) корпуса машины. Выходы БК 1 соединены со вторыми каналами электронных блоков управления E-GAS - 9, гидропривода системы управления поворотом 10, золотниковая коробка (ЗК) - 11, автоматическая коробка передач АКП - 12, электромагнитным клапанам фрикциона блокировки Фбл - 13, гидрозамедлителя ГЗ-14 и модуляторами давления управления остановочными тормозами ОТ - 15 (условно на Фиг.1 указан один модулятор). Дополнительно введенный электромагнитный клапан 16 позволяет регулировать наполнение гидромашин, то есть гидротрансформатора и гидрозамедлителя.
) корпуса машины. Выходы БК 1 соединены со вторыми каналами электронных блоков управления E-GAS - 9, гидропривода системы управления поворотом 10, золотниковая коробка (ЗК) - 11, автоматическая коробка передач АКП - 12, электромагнитным клапанам фрикциона блокировки Фбл - 13, гидрозамедлителя ГЗ-14 и модуляторами давления управления остановочными тормозами ОТ - 15 (условно на Фиг.1 указан один модулятор). Дополнительно введенный электромагнитный клапан 16 позволяет регулировать наполнение гидромашин, то есть гидротрансформатора и гидрозамедлителя.
Работает предлагаемая система следующим образом. Включение системы происходит при движении БГМ с большой скоростью (υ>35 км/ч). При отклонении дороги от выбранного ранее направления движения водитель создает в соответствии с навыками вождения упреждающее управляющее воздействие - поворачивает штурвал 3 на некоторый угол αшт. Соответствующий сигнал сенсора 3, как и положение педали подачи топлива αпт 2, частоты вращения вала двигателя n∂ 6, скорости движения υ 7, и номера включенной передачи mj 5 поступают в бортовой компьютер 1. На основе этих сигналов определяются параметры управляемого движения: расчетная угловая скорость поворота ωр(αшт, αпт), боковое ускорение носовой  и кормовой
и кормовой  частей корпуса машины. При этом возможно движение машины по выбранной водителем траектории или с отклонением движения - с боковым сносом или по спиралевидной траектории. На основе мониторинга управляющих воздействий водителя и параметров G сенсора 8 в бортовом компьютере осуществляется идентификация вида отклонения траектории.
частей корпуса машины. При этом возможно движение машины по выбранной водителем траектории или с отклонением движения - с боковым сносом или по спиралевидной траектории. На основе мониторинга управляющих воздействий водителя и параметров G сенсора 8 в бортовом компьютере осуществляется идентификация вида отклонения траектории.
Движение с боковым сносом, которое трудно управляемо, идентифицируется по следующим условиям:
1. Фактическая угловая скорость ωф и кривизна траектории поворота БГМ kф, их чувствительность (частная производная) к управляющему воздействию превышают расчетные:

2. Боковое ускорение кормовой части корпуса превышает ускорения носовой части, т.е.: 
3. Фактический курсовой угол превышает расчетное значение: φф>φр
Для ограничения сноса система создает следующие компенсирующие управления.
1. Управляет торможением  БГМ - наполнением ГЗ при
БГМ - наполнением ГЗ при  . Для предохранения двигателя от перегрузки в процессе торможения с помощью электромагнитного клапана осуществляется опорожнение ГТ.
. Для предохранения двигателя от перегрузки в процессе торможения с помощью электромагнитного клапана осуществляется опорожнение ГТ.
2. Увеличивает угловую скорость и кривизну траектории в сторону заноса, управляя гидронасосом гидропривода до прекращения заноса.
3. Переключает в АКП передачу на номер ниже (mj→mj-1), опорожняя ГТ, разгоняет двигатель, увеличивая n∂.
Идентификация движения БГМ по спиралевидной траектории из-за перегрузки двигателя и разблокировка ГТ осуществляется по следующим условиям:
1. Частота вращения вала двигателя меньше порогового значения  , при котором происходит разблокировка ГТ, т.е.
, при котором происходит разблокировка ГТ, т.е.  , а передаточное отношение ГТ меньше единицы (iгт<1).
, а передаточное отношение ГТ меньше единицы (iгт<1).
2. Фактическая скорость движения меньше расчетной: υф<υp(n∂, mj, αпт)
3. Фактическая кривизна траектории и ее чувствительность к управляющему воздействию выше расчетных:

При идентификации этого отклонения система создает режим движения на повышенной частоте вращения вала двигателя, переключая передачу в АКП на номер ниже, уменьшает расчетную кривизну регулированием угла наклона шайбы гидронасоса ГП СУП по сигналу, подаваемому на второй канал управления ГП.
Реализация предлагаемой системы позволяет повысить скорость движения БГМ при выполнении условий вписываемости в ограниченный коридор. Введение гидрозамедлителя с электромагнитным клапаном управления его заполнением и опорожнением ГТ придает БГМ новые свойства: возможность торможения машины позволяет тормозить гусеничную машину, сохраняя возможность управления поворотом. Это свойство особенно эффективно не только при ошибочном превышении водителем скорости входа в поворот, но и при движении машины на спусках по серпантину, т.к. сохраняется управляемость и исключается "заброс" двигателя по оборотам. Расширение номенклатуры датчиков G сенсора - установка датчиков бокового ускорения в кормовой части корпуса - позволяет более точно идентифицировать условия бокового заноса. Кроме того, снижается уровень требований к квалификации водителя и его утомляемость при длительном движении по дорогам ограниченной ширины и низкими сцепными свойствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2529929C1 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| Система защиты двигателя гусеничной и колесной машины от заброса по оборотам коленчатого вала | 2023 |
|
RU2817434C1 |
| Дифференциальный механизм поворота мобильной машины и способ управления дифференциальным механизмом поворота | 2020 |
|
RU2805453C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ПОВОРОТА МОБИЛЬНОЙ МАШИНЫ И СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫМ МЕХАНИЗМОМ ПОВОРОТА | 2019 |
|
RU2721207C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕБУЕМОГО ПОВОРАЧИВАЮЩЕГО МОМЕНТА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ ГУСЕНИЧНОЙ МАШИНЫ | 2017 |
|
RU2665159C1 |
| ГИДРОТРАНСФОРМАТОР-ГИДРОЗАМЕДЛИТЕЛЬ | 2001 |
|
RU2227233C2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
Изобретение относится к области транспортного машиностроения и может быть использовано при синтезе систем управления поворотом быстроходных гусеничных машин с гидромеханической трансмиссией и дифференциальным механизмом поворота с гидрообъемным приводом. Система стабилизации содержит бортовой компьютер, гидрозамедлитель и электромагнитный клапан управления наполнением гидрозамедлителя и опорожнением гидротрансформатора. Со входом бортового компьютера соединены сенсоры положения и перемещения органов управления движением машины, частоты вращения вала двигателя, скорости движения, сенсор бокового и вращательного движения машины (G-сенсор), сенсор номера включенной передачи, сенсоры для определения ускорений продольного, боковых носовой и кормовой частей корпуса. Выход бортового компьютера соединен с электронными каналами управления подачей топлива E-Gas, гидропривода системы управления поворотом, золотниковой коробкой управления автоматической коробкой передач и модулятором управления остановочными тормозами. Электромагнитный клапан управления соединен с выходом бортового компьютера. Технический результат заключается в повышении управляемости гусеничных машин. 1 ил.
Система стабилизации движения быстроходной гусеничной машины, содержащая бортовой компьютер, со входом которого соединены сенсоры положения и перемещения органов управления движением машины (положения педали подачи топлива αnm угла поворота штурвала αшт, положения педали управления тормозом αm), частоты вращения вала двигателя nд и скорости движения V, а также сенсор параметров, определяющих боковое и вращательное движение машины G-сенсор (линейная и угловая скорости движения машины, боковое ускорение), а выход бортового компьютера соединен с электронными каналами управления подачей топлива E-Gas, гидропривода системы управления поворотом, золотниковой коробкой управления автоматической коробкой передач и модулятором управления остановочными тормозами, отличающаяся тем, что в систему дополнительно введен гидрозамедлитель и электромагнитный клапан управления наполнением гидрозамедлителя и опорожнением гидротрансформатора, соединенный с выходом бортового компьютера, вход бортового компьютера соединен с сенсором номера включенной передачи, а номенклатура сенсора параметров, определяющих боковое и вращательное движение машины, расширена, то есть дополнительно введены сенсоры для определения ускорений продольного, боковых носовой и кормовой частей корпуса.
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2158682C1 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1986 |
|
SU1441674A1 |
| US 2008183353 A1, 31.07.2008 | |||
| US 2004192493 A1, 30.09.2004. | |||

