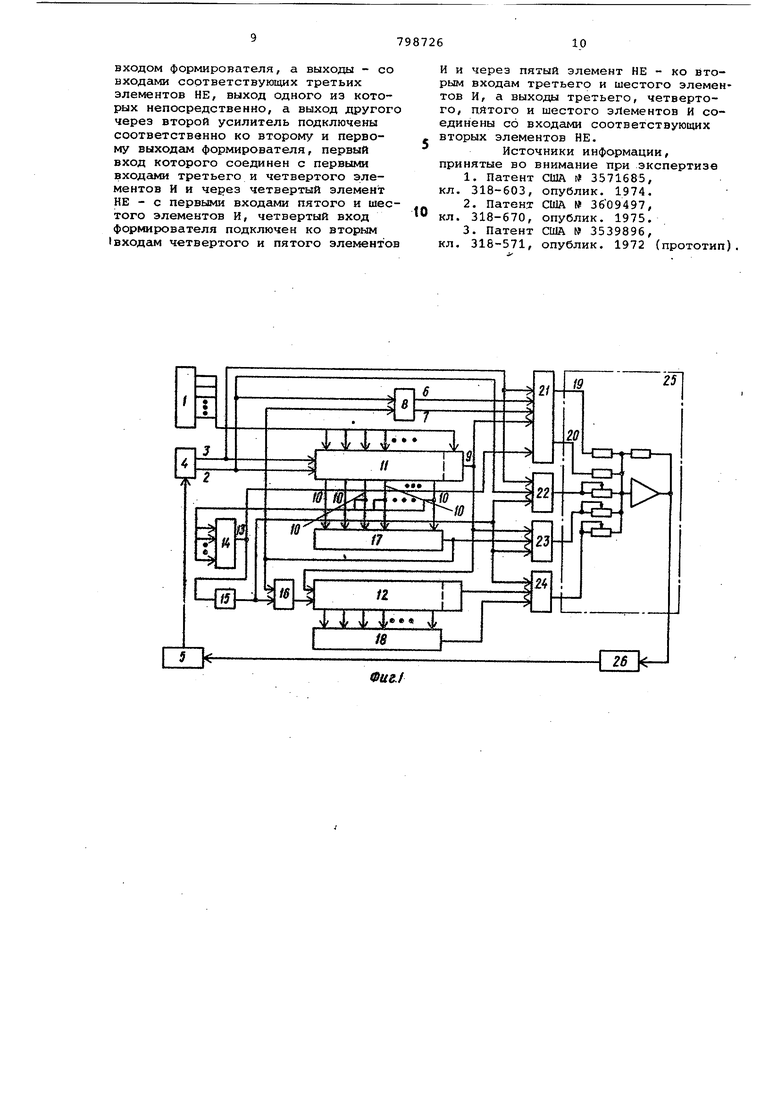
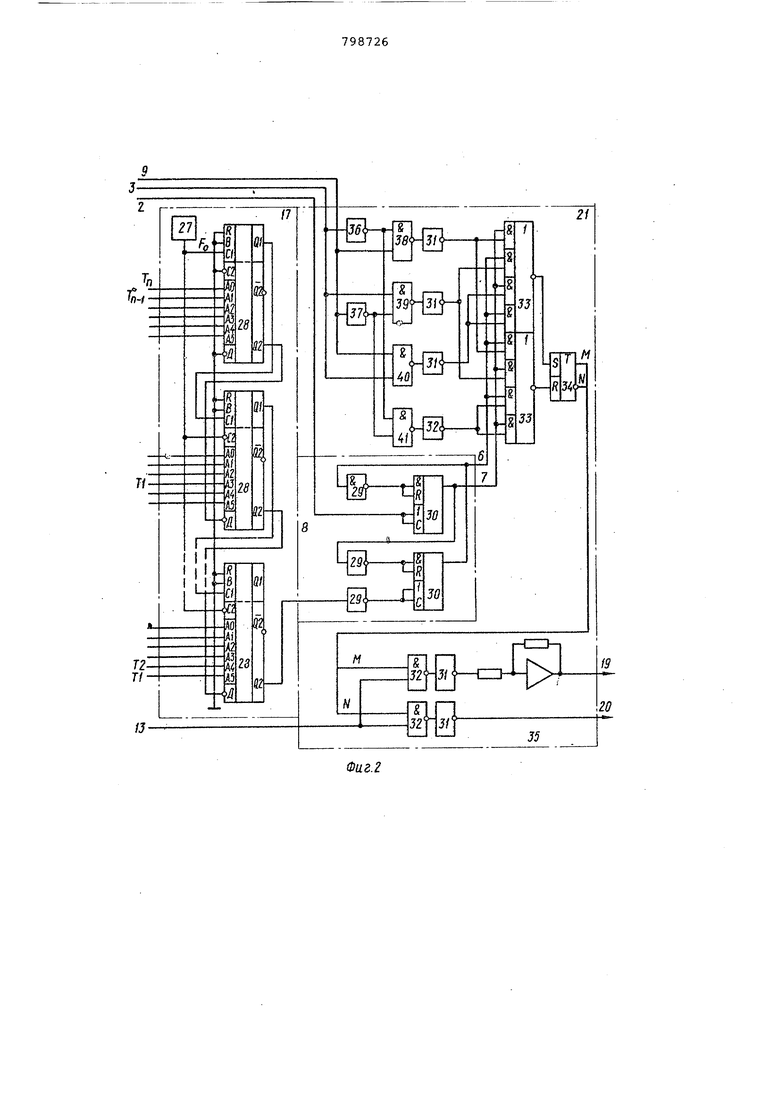
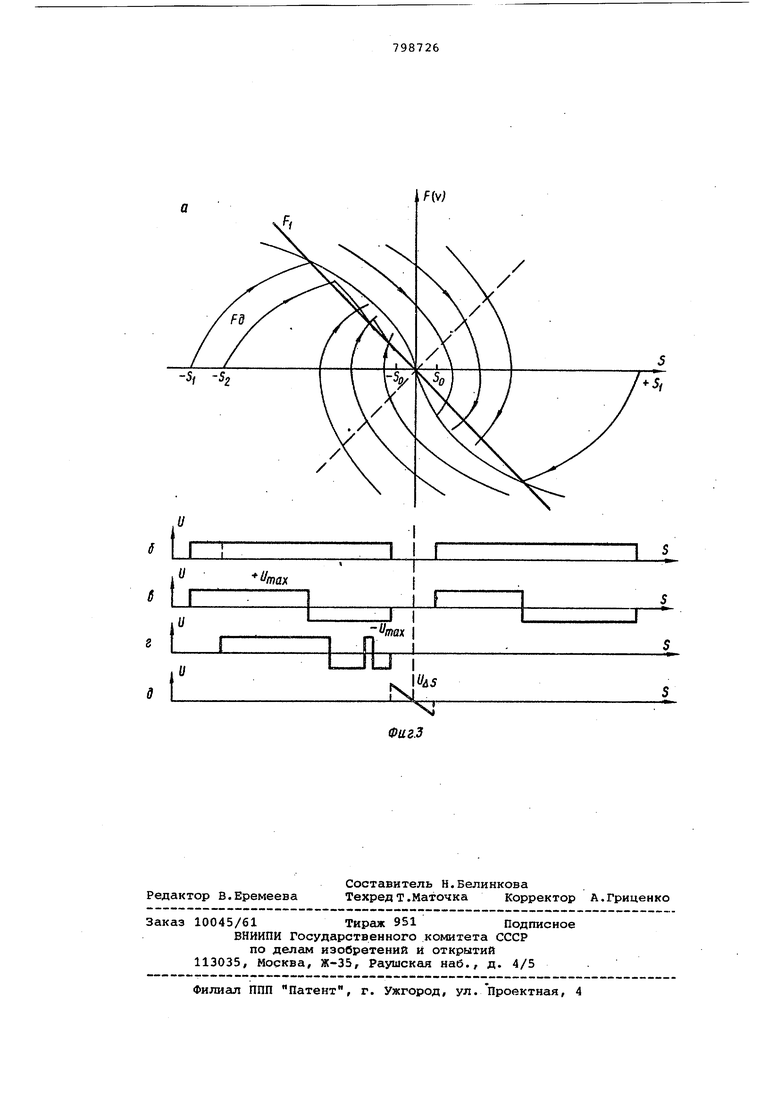
Изобретение относится к автоматическому регулированию и .управлению и может быть использовано, например в устройствах позиционирования станков с программным управлением, прецизионных координатно-измерительных устройств и фотопостроителях, в которых выходной сигнал датчика перемещения представлен в частотно-импульсной форме. Известна цифровая следящая система управления пepe eu eниeм, в которой физическое перемещение объекта фиксируется при помощи информации реверсивного счетчика, содержащая реверсивный счетчик, операционный усилитель, преобразователь скорости перемещения объекта в постоянное напряжение, схему формирования управляющего сигнала с усилителем мощности, исполнительное устройство, объект регулирования и частотный датчик Счетчик заполняется или освобож дается при помощи направленно ориентированных импульсов. Информация, записанная в счетчике, управляет операционным усилителем, чтобы обеспечить индикацию о положении объекта относительно нулевой точки 1J . Известна также цифровая управляющая .система с цифровым управлением, устанавливанвдая в определенное положение подвижной элемент и содержащая схемы сравнения счетных импульсов, в которые входят кольцевые регистры, принимающие входные дискретные сигналы от датчика, характеризующие тре- буемое положение устройства и сигналы обратной связи, характеризующие действительное положение объекта. В этих схемах арифметические комбинации входных сигналов компенсируются в зависимости от требуемого позиционного смещения и с помощью сигналов обратной связи вырабатываются сигналы, управляющие положением объекта 2. Однако системы имеют недостаточную точность и быстродействие. Наиболее близкой по технической сущности к предлагаемому является цифровая следящая система управления перемещением, содержащая программное устройство, блок программируемой частоты, цифровой интегратор, фиксирующий величину рассогласования, преобразователь ошибки рассогласования в частоту следования импульсов, KOMnapaiiop частот, сравнивакяций частотный сигнал, пропорциональный рассогласования системы, с программируемой частотой, второй цифровой интегратор, соединенный с компаратором частот и частотным дат чиком перемещения объекта и подключенный ко второму преобразователю код-частота. Выход последнего подключен к усилителю, соединенному через исполнительное устройство с (объектом перемещения З. Недостаток системы - низкое быст родействие, которое вызвано тем, чт перемещ-ение объекта происходит не в режиме разгон-торможение с максимал но допустимым управляющим сигналом для исполнительного элемента, а фор мируется в цифровом интеграторе, фиксирующим в любой момент времени разность числа импульсов, прошедших от компаратора частот импульсов поступивших от частотного датчика перемещения объекта, т.е. в линейно режиме, Цель изобретения - повьпление быс родействия системы. Поставленная цель достигается тем, что в цифровую следящую систем управления перемещением объекта, со держащую пос тедовательно соединенны первый усилитель, исполнительное устройство, объект управления и час тотный датчик перемещения, знаковый и информационный которого со единены управляющим и счетным входами первого цифрового интегратора, подключенного информационными и зна ковыми входами к выходам программно блока, а информационными выходами ко входам первого преобразователя код-частота, соединенного выходом с первым входом компаратора частот, и второй интегратор, подключенный информационными выходами ко входам второго преобразователя код-частота введены три преобразователя частоты в постоянное напряжение, формирователь максимального управляющего сигнала и последовательно соединенные элемент ИЛИ, первый элемент НЕ и первый элемент И, выход которого подключен к счетному входу второго цифрового интегратора, а второй вход - к выходу первого преобразователя код-частота и к первому входу первого преобразователя частоты в постоянное напряжение, соединенного вторым входом с первыми входами второго и третьего преобразователей частоты в постоянное напряжение и с выходом первого элемента НЕ, а третьим входом - с управляющим входом второго и со знаковым выходом первого цифровых интеграторов и с первым входом фop шpoвaтeля максимального управляющего сигнала, второй и третий входы которого подключены, соответственно, к первому и второму выходам компаратора частот, первый и .торой выходы - к первому и второму входам, соответственно, первого усилителя, а четвертый вход - к знаковому выходу частотного датчика перемещения, второй и третий входы второго преобразователя частоты в постоянное напряжение соединены, соответственно, со знаковым и информационным выходами частотного датчика перемещения, второй и третий третьего преобразователя частоты в постоянное напряжение - с информационными входами второго цифрового интегратора и второго преобразователя код-частота, соответственно, а выходы первого, второго и третьего преобразователей частоты в постоянное напряжение - с третьим, четвертым и пятым входами первого усилителя, причем информационный выход частотного датчика перемещения, входы и выход элемента ИЛИ подключены, соответственно, ко второму входу компаратора частот, к информационным выходам старших разрядов первого цифрового интегратора и к пятому входу формирователя максимального управляющего сигнала и тем, что формирователь максимального управляющего сигнала содержит элементы И-ИЛИ, первые входы которых соединены, соответственно, со вторым и третьим входами формирователя, вторые входы - с выходами вторых элементов НЕ, а выходы .- со входами триггера, подключенного прямым выходом с первыми входами вторых элементов И, вторые входы которых соединены с пятым входом формирователя, а выходы - со входами соответствующих третьих элементов НЕ, выход одного из которых непосредственно, а выход другого через второй усилитель подключены ко второму и первому выходам формирователя, первый вход которого соединен с первыми входами третьего и четвертого элементов И и через четвертый элемент НЕ - с первыми входами пятого и щестого элементов И, четвертый вход формирователя подключен ко вторым входам четвертого и пятого элементов И и через пятый элемент НЕ - ко вторым входам третьего и шестого элемента И, а выходы третьего, четвертого, пятого и шестого элементов И соединены со входами соответствующих вторых элементов НЕ. На фиг. 1 приведена функциональная рхема системы; на фиг. 2 - схема первого преобразователя код-частота, компаратора частот и формирователя максимального управляющего сигнала; на фиг. 3 - диаграммы, поясняющие принцип работы системы. Цифровая следящая система регулирования содержит программный блок 1, информационный 2 и знаковый 3 выходы частотного датчика 4 перемещения объекта 5, выходы б, 7 компаратора 8 частот, знаковый выход 9 и информ ционные выходы 10 первого 11 цифрог вого интегратора, второй 12 цифровой интегратор, выход 13 первого элемента ИЛИ 14, первый элемент НЕ 15, первый элемент И 16, первый 17 и второй 18 преобразователи, первый 19 и второй 20 выходы формирователя максимального управляюще|го сигнала 21, второй 22, первый и третий 24 преобразователи частоты в постоянное напряжение, первый уси литель 25 и исполнительное устройст во 26. На фиг. 2 изображены генератор 27иглпульсов и управляемые делители 28частоты преобразователя 17, элементы НЕ 29 и делители 30 частоты компаратора 8 частот, вторые и трет элементы НЕ 31, вторыеэлементы И 3 элементы И-ИЛИ 33, триггер 34, второй 35 усилитель, пятый 36 и четвер тый 37 элементы НЕ и третий 38, пя,тый 39, четвертый 40 и шестой 41 элементы И формирователя 21. На фиг. За - фазовые траектории системы , на фиг. 36 - управляющий сигнал на выходе 13 элемента ИЛИ 14 диаграммы (фиг.З в и г) отражают ха рактер изменения максимально допустимого управляющего сигнала на выхо де усилителя 26 при рассогласования объекта - S и 52; на фиг. Зд - диаграмма напряжения на выходе преобразователя 23 в зависимости от рассогласования, фиксируемого интегратором 11 в зоне So. , Система работает следующим образом. Блок 1 формирует в прямом позици онном коде величину рассогласования и записывает его в интегратор 11 со знаком, характеризующим величину рассогласования относительно исходного положения объекта 5. Значение величины рассогласования преобразуется с помощью преобразователя 17 в частоту следования импульсов, про порциональную величине рассогласова ния. Частота F преобразователя 17 поступает на компаратор 8. Значение частоты определяется из выражения с - , . N 1 0« где FO - частота следования импульсов генератора 27; N - число, соот ветствующее ошибке рассогласования/ В - основание системы счисления интегратора 11; п - число информацион ных разрядов интегратора 11. Компаратор 8 сравнивает частоту F-J с частотой FQ. датчика 4 и, если частота F больше частоты , форми рует на выходе 6 импульсные сигналы с частотой . Если частота fg. больше частоты F , то импульсные сигналы с частотой Fcj/10 формируются на выходе 7 компаратора 8. Если значение рассогласования S превышает значение S,,, то элемент ИЛИ 14 формирует сигнал, разрешающий работу формирователя 21, а выходной сигнал элемента НЕ 15 запрещает поступление счетных импульсов на вход интегратора 12 и запрещает работу преобразователей 22, 23 и 24, выходное напряжение которых равно нулю. Рассмотрим формирование сигналов (ДЛЯ управления исполнительным элементом в случае, когда значение рассогласования объекта 5 равно - S, при этом , а скорость объекта равна нулю; В момент записи кода рассогласования в интегратор 11 частота на выходе преобразователя 17 ниже частоты FQ, соответствующей реальной скорости- перемещения объекта. Выходной сигнал усилителя 25, управлягаций исполнительным элементом, соответствует максимально допустимому для данной системы. Объект перемещения начинает приближаться к точке позиционирования с максимально допустимой скоростью, причем скорость движения объекта возрастает. В некоторый момент, когда частота FQ, превышает частоту F и происходит переключение триггера 34, выходной сигнал усилителя 26 изменяет знак, но значение управляющего сигнала остается по-прежнему максимальным. Объект 5 начинает тормозиться с максимально допустимым ускорением, при этом частота датчика 4 начинает падать. Когда частота FQ, датчика 4 станет меньше F. происходит повторное включен е управляющего сигнала, обеспечивающего разгон объекта 5 с максимальным ускорением. Такой режим управления объектом существует до тех пор, пока значение рассогласования не становится меньше значения S. В общем случае значение знаков рассогласования S и направления скорости и, а также соотношения частот F и Fn. могут быть различны. При любом соотношении знаков рассогласования и скорости сигнал формирователя 21 заставит объект 5 переместиться в зону /So/ . В момент вхождения объекта перемещения в зону выходной сигнал элемента ИЛИ 14 отключает от входа усилителя 25 управляющие сигналы формирователя 21, а сигнал элемента ИЕ 15 разрешает поступление через элемент И 16 импульсов преобразователя 17 на вход интегратора 12, а также разрешает работу преобразователей 22, 23 и 24. В этом случае сигнал управления устройством 26 равен сумме трех составляющихи и,+ и,,+ и,, где и К ( ) - выходное напряжение преобразователя 23, пропорциональное о;иибке рассогласования; 1° K«f(N.,-JF,.,dt) - выходное напря л Ь Ъ о жение преобразователя 24, пропорцио нальное интегралу ошибки рассогласо вания; и.т Ку F(j - выходное напряже ние преобразователя 22, пропорциональное скорости движения объекта; N - число, соответствующее ошибке рассогласования, записанное в интегратор 11 от блока 1; К, К, К, коэффициенты пропорциональности. Следовательно, в зоне рассогласо вания So система является системой с интегральным управлением, в котор управляющий сигнал на исполнительно элементе, пропорционален ошибке рассогласювания системы, ее произво ной и интегралу, а в- таких системах статическая ошибка в установившемся регистре при отработке заданнойвел чины рассогласования равна нулю. Повышение быстродействия в предлагаемой системе достигается благод ря использованию двух режимов управ ления, один из которых является предельным управлением, а второй линейным. Предельное управление является наиболее выгодным, поскольку оно обеспечивает максимальное испол зование возмохносхей исполнительног двигателя и дает максимальное быстродействие. Однако система с предел ным управлением неудовлетворительно работает вблизи положения равновеси Для обеспечения высокой точности и устранения автоколебаний в этой зон в предлагаемой системе используется линейное управление. Значение зоны линейного управления S0 выбирается меньше максимально возможного значения перемещения 5, Отработка значений рассогласования, превышающих зону S, осуществляется в режиме разгон-торможение с максимально допустимым ускорением системы что позволяет перемещать объект с большой скоростью, затрачивая меньшее время на перевод объекта из одного положения в другое. Формула изобретения 1. Цифровая;следящая система управления перемещением объекта, содержащая последовательно соединенные первый усилитель, исполнительное устройство, объект управления и частотный датчик перемещения, знаковый и информационный выходы которого соединены с управляющим и счетным входами первого цифрового интегратора, подключенного информационными и знаковыми входами к выходам программного блока, а информационными выходами - ко входам первого преобразователя код-частота, соединенного .выходом с первым входом компаратора частот, и втор эй интегратор, подключенный информационными выходами ко входам второго преобразователя код-частота, отличающаяс я тем, что, с целью повышения быстродействия системы, в нее введены три преобразователя частоты в постоянное напряжение, формирователь максимально1о управляющего сигнала и последовательно соединенные элемент ИЛИ, первый элемент НЕ и первый элемент И, выход которого подключен к счетному входу второго цифрового . интегратора, а второй вход - к выходу первого преобразователя код-частота и к первому входу первого преобразователя частоты в постоянное напряжение, соединенного вторым входом с первыми входами второго и третьего преобразователей частоты в 1%)стоянное напряжение и с выходом первого элемента НЕ, а третьим входом - с управляющим входом второго и со знаковым выходом первого цифровых интеграторов и с первым входом формирователя максимального) управляющего сигнала, второй и третий входы которого подключены, соответственно, к первому и второму выходам компаратора частот, Отервый и второй выходы - к первому и второму входам, соответственно, первого усилителя, а четвертый вход - к знаковому выходу частотного датчика перемещения, второй и третий входы второго преобразователя частоты в постоянное напряжение соединены, соответственно, со знаковым и информационным выходами частотного датчика перемещения, второй и третий входы третьего преобразователя частоты в постоянное напряжение - с информационными выходами второго цифрового интегратора и второго преобразователя код-частота, соответственно, а выходы первого, второго и третьего преобразователей частоты в постоянное напряжение - с третьим, четвертым и пятым входами первого усилителя, причем информационный выход частотного датчика перемещения, входы и выход элемента,ИЛИ подключены, соответственно, ко второму входу компаратора частот, к информационным выходам старших разрядов первого цифрового интегратора и к пятому входу формирователя максимального управляющего сигнала. 2. Система поп.1, отличающаяся тем, что формирователь аксимального управляющего сигнала содержит элементы И-ИЛИ, первые входы которых соединены, соответственно, со вторым и третьим входами ормирователя, вторые входы - с выодами вторых элементов НЕ, а выоды - со входами триггера, подклюенного прямым выходом к первым ходам вторых элементов И, вторые ходы которых соединены с пятым
входом формирователя, а выходы - со входами соответствующих третьих элементов НЕ, выход одного из которых непосредственно, а выход другого через второй усилитель подключены соответственно ко второму и первому выходам формирователя, первый вход которого соединен с первыми входами третьего и четвертого элементов И и через четвертый элемент НЕ - с первыми входами пятого и шестого элементов И, четвертый вход формирователя подключен ко вторым входам четвертого и пятого элементов
И и через пятый элемент НЕ - ко вторым входам третьего и шестого элементов И, а выходы третьего, четвертого, питого и шестого элементов и соединены со входами соответствующих вторых элементов НЕ.
Источники информации, принятые во внимание при экспертизе
1.Патент США rf 3571685, кл. 318-603, опублик. 1974.
2.Патент США 3609497,
О кл. 318-670, опублик. 1975.
3.Патент США W 3539896,
кл. 318-571, опублик. 1972 (прототип)
M
UiTT«
w
R3
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая следящая система | 1980 |
|
SU934446A1 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| Устройство для определения динамической податливости крупномасштабных фундаментов | 1988 |
|
SU1564502A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| Устройство для воспроизведения мно-гОКАНАльНОй МАгНиТНОй зАпиСи | 1979 |
|
SU836662A1 |
| УСТРОЙСТВО ПОИСКА И СОПРОВОЖДЕНИЯ СИГНАЛА СИНХРОНИЗАЦИИ В СПУТНИКОВЫХ СИСТЕМАХ СВЯЗИ ПО ПРИЕМУ | 1995 |
|
RU2093964C1 |
| Устройство для регулирования расхода жидкости | 1983 |
|
SU1158979A1 |
| Устройство для регулирования расхода жидкости | 1984 |
|
SU1236434A2 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
-M ,Щ
-Ai A2 «
28 -A4 -45
M Л.
Й
/J1-11
Ni
4
Фиг.з
