(5) ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для водителей транспортных средств | 1983 |
|
SU1238135A1 |
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| Тренажер для водителей транспортных средств | 1988 |
|
SU1626260A1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| Способ имитации коллимационного эффекта в проекционных системах визуализации внекабинной обстановки для авиационных тренажеров военного назначения и проекционная система визуализации | 2017 |
|
RU2647665C1 |
| Устройство для имитации визуальной обстановки в тренажере транспортного средства | 1984 |
|
SU1218416A1 |
| Тренажер транспортных средств | 1981 |
|
SU1008765A1 |
| Имитатор внешней визуальной обстановки тренажера транспортного средства | 1987 |
|
SU1504659A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
I
Изобретение относится к техническим устройствам обучения водителя транспортного средства, в частности, к тренажерам.
Известен тренажер водителя транспортного средства, содержащий место обучаемого с органами управления, соединёнными с датчиками, выходы которых подключены к одному из входов моделирующего блока, один из выходов которого соединен с входом блока коррекции , а второй - с блоком визуализации транспортной обстановки, к выходу которого подключен дешифратор, соединенный с другим входом моделирующего блока
Известный тренажер не обеспечивает эффективногообучения из-за отвлечения внимания обучаемого речевыми командами и недостаточного динамического соответствия имитируемых и реальных управляющих воздействий.
Цель изобретения - повышение эффективности обучения.
Для достижения поставленной цели тренажер, содержащий место обучаемого с органами управления, соединенными с датчиками, подключенными к соответствующим выходам моделирующего блока, один из выходов которого соединен с входом блока коррекции, а второй - с блоком визуализации транспортной обстановки, к выходу которого подключен дешифратор, соединенный
10 с другим входом моделирующего, снабжен узлом задержки, а блок коррекции содержит имеющие источники света проекторы, один из которых снабжен приводом его вертикального и горизон15тального перемещения, причем третий выход моделирующего блока непосредственно и через узел задержки соединен соответственно с приводом вертикального и горизонтального перемеще20ния проектора и его источником света.
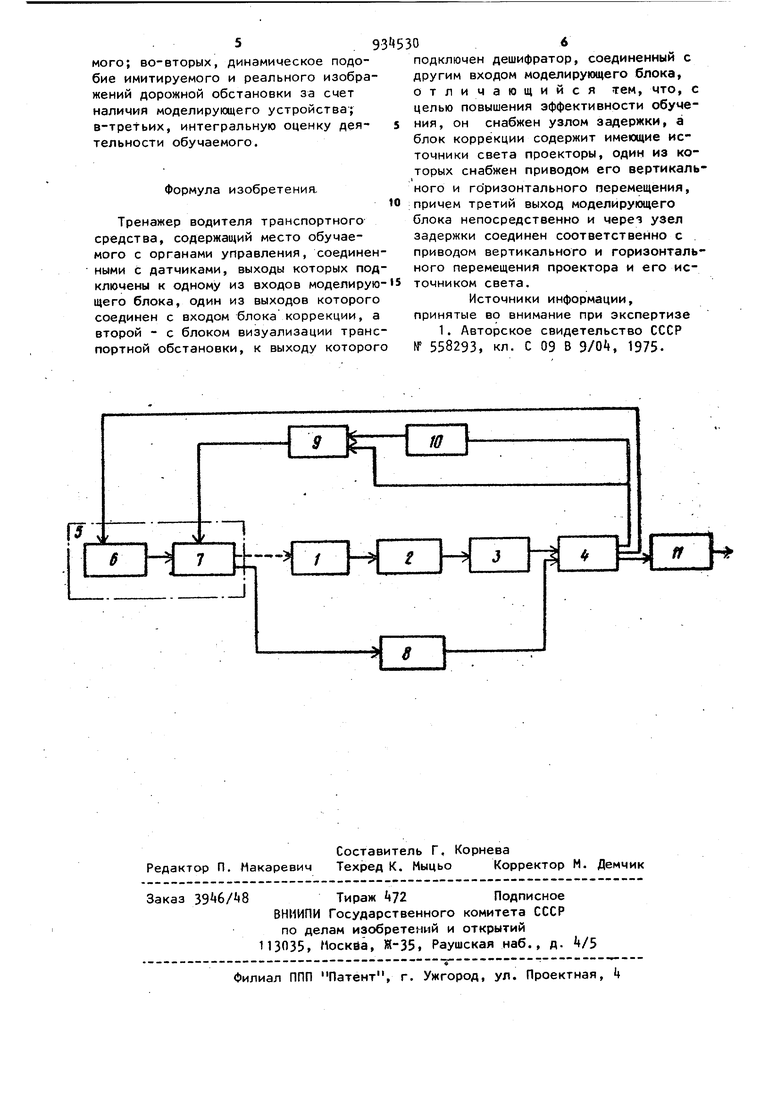
На чертеже представлена блок-схема тренахчера. Тренах(ер содержит рабочее место 1 обучаемого с органами 2 управления, соединенными с датчиками 3 выходы которых соединены с соответствующими входами моделирующего блока , выполненного на операционных усилителях. Блок 5 визуализации транспортной обстановки, включает кино или телепроектор 6, соединенный с вы ходом моделирующего блока k, и экран 7. Дешифратор 8 свйзан входом с блоком 5 визуализации транспортной обстановки, а выходом - с моделирующим блоком k, представляет собой кодирую щйй блок,, считывающий информацию, соответствующую эталонному управлени тренажером с кино- либо магнитной пленок. Блок 9 коррекции представляет собой источники света с проекцион ными системами, обеспечивающими индицирование неподвижной метки в цент ре экрана, а также перемещение по экрану подвижной метки в вертикально и горизонтальном направлениях с помо щью привода по сигналам, поступающим с моделирующего блока 4, которое обе спечивает динамическое соответствие имитируемых на тренажере и реальных управляющих воздействий. Узел 10 задержки выполнен -в виде электронного реле времени, имеющего регулируемую длительность интервала. Блок 11 интегральной оценки представляет собой электронный прибор, выполненный на операционных усилителях и других стандартных элементах,с помощью кото рого считывается количество неправильных действий обучаемого тем, либо иным органом управления и оценивается их значимость. Устройство работает следующим образом ., Обучаемый наблюдает за изменением дорожной обстановки, проектируемой проектором 6 на экран 7- Манипуляция органами 2 управления преобразуется в электрические сигналы с помощью да чиков 3, поступающие на входы модели рующего устройства k, где они сравниваются с эталонными сигналами, поступающими с дешифратора 8. При правильных действиях обучаемого сигналы на входе моделирующего блока k равны нулю. При ошибочных действиях по любому каналу управления на выходе моделирующего блока k формируются си| налу,.пропорциональные этим ошибкам, которые одновременно поступают на блок 11 .интегральной оценки и на электрический привод блока 9 коррекции. Одновременно включаются источники света обоих проекторов блока 9 коррекции, которые с помощью оптической проекционной системы проецируются в виде двух световых меток на экран 7. Одна из меток - неподвижная проецируется примерно в центр экрана, а другая - подвижная - перемещается по экрану в двух взаимно перпендикулярных направлениях в зависимости от ошибки, допущенной обучаемым. Задача обучаемого состоит в том, чтобы с помощью рулевого колеса (перемещение метки по горизонтали) и педалей акселератора и тормоза (перемещение по вертикали у совместить световые метки. При обнулении меток ошибка исправлена и лампочки проекторов блока 9 коррекции гаснут. Для избежания управления обучаемым исключительно по световым меткам без учета имитируемой дорожной обстановки, сигнал на блок Э коррекции поступает с временной задержкой, реализуемой в узле 10 задержки. Величина задержки выбирается в зависимости от уровня обученности в пределах 0,20,5 с. При ошибках, превышающих допустимые значения, приводящие к возникновению неустранимых критических ситуаций, в моделирующем устройстве 4 вырабатывается сигнал, поступающий в блок 5 имитации транспортной обстановки, прекращающий данный цикл занятия. Информация, поступающая в блок 11 интегральной оценки, после соответствующего преобразования, представляется.в виде удобном для считывания, например, в цифровой форме. Таким образом, корректирующие сигналы, воспроизводимые на экране одновременно с имитируемой дорожной обстановкой, не отвлекают обучаемого. Применение интегральной оценки каждого цикла занятий позволяет отказаться от осредненного, статистического подхода к процессу обучения, что дает возможность прекратить занятия при достижении обучаемым требуемого уровня. Это приводит к повышению эффективности процесса обучения в целом. Предлагаемый тренажёр позволяет обеспечить, во-первых, обратную связь по управлению с помощью подвижной метки, которая одновременно служит корректирующим сигналом для обучаемого; во-вторых, динамическое подобие имитируемого и реального изображений дорожной обстановки за спет наличия моделирующего устройства; в-тpetbиx, интегральную оценку деятельности обучаемого. Формула изобретения Тренажер водителя транспортного средства, содержащий место обучаемого с органами управления, соединенными с датчиками, выходы которых подключены к одному из входов моделирующего блока, один из выходов которого соединен с входом блока коррекции, а второй - с блоком визуализации транспортной обстановки, к выходу которого
CO rtlJГП
гт:
4lZIhподключен дешифратор, соединенный с другим входом моделирующего блока, отличающийся тем, что, с целью повышения эффективности обучения, он снабжен узлом задержки, а блок коррекции содержит имеющие ис точники света проекторы, один из которых снабжен приводом его вертикального и горизонтального перемещения, причем третий выход моделирующего блока непосредственно и через узел задержки соединен соответственно с приводом вертикального и горизонтального перемещения проектора и его источником света. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 558293, кл. С 09 В З/О, 1975.
