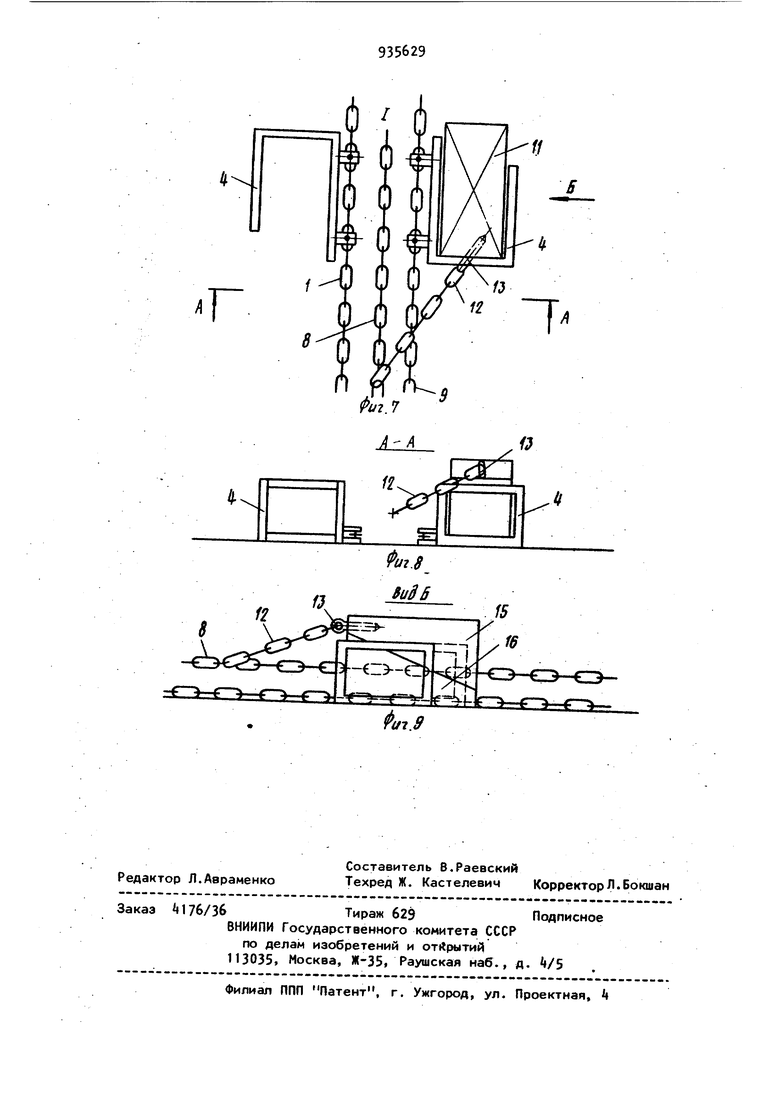
. Изобретение относится к горному делу, конкретно к креплению очистных забоев при безлюной выемке весь ма тонких угольных пластов. Известно костровое крепление забоя, состоящее из двух передвижных клиньев и перемещаемое к мосту установки в лаве с помощью канатов l Недостатком известного способа является низкая скорость крепления, обусловленная поочерёдной транспортировкой в лаву и установкой с расп ром комплектов в костровой крепи. Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является способ крепления лавы клиновой крепью, включающий размещение в обоймы в подготовительной выработке ком лектов крепи, их доставку к месту крепления в лаве и установку по падению с принятым шйгом в обоймах путем протягивания соединенного с обоймами транспортирующего гибкого ТЯГОВОГО органа, протягивание одновременно с последним распорного гибкого тягового органа, распор путем его натяжения .комплектов крепи, разгрузку от комплектов крепи обойм путем перемещения их вдоль лавы в обратном направлении транспортирующим гибким тяговым органом и перемещение гибких тяговых органов к забоюГ2|. Недостатком известного способа крепления является наличие многочисленных холостых пробегов обоймы, обусловленных необходимостью возвра|цения ее в подготовительную выработку за партиями комплектов Kpenji. Цель изобретения - повышение производительности крепления путем уменьшения количества и совмещения операций в циклах по креплению. Указанная цель достигается тем, что распорный гибкий тяговый орган при протягивании соединяют в подготовительной выработке последова39тельно со всеми размещенными в обоймах комплектами крепи с возможностью автоматического рассоединения при дос тижении в нем заданного усилия натяжения, распор всех комплектов крепи производят одновременно и доводят усилие в распорном гибком тяговом органе до величины, соответствующей рассоединению его с комплек тами крепи, при этом перемещение обойм вдоль лавы в обратном направле нии транспортирующим гибким тяговым органом производят на величину, равную половине шага установки комплектов крепи в лаве по падению, а посл |перемещенйя обоих гибких тяговых органов к забою производят перемещение к забою всех обойм путем протягивания вдоль лавы соединенного с ними транспортирукяцего гибкого тягового органа.. На фиг. 1 схематично изображена лава с оборудованием для крепления, вид в плане, (до начала установки кpeпиj; на фиг. 2 - то же, при протягивании рабочей ветви транспортиру щего гибкого тягового органа из приз бойного пространства лавы и доставке обойм с размещенными в них комплектами крепи на место установки очередного ряда крепи; на фиг. 3 т же, после протягивания рабочей ветви транспортирующего гибкого тягового органа по всей лаве и распора все комплектов крепи, на фиг. - то же, после протягивания всех обойм в обратном направлении на величину, равную половине шага установки комплектов крепи в лаве по падению; на фиг. 5 то же, после передвижки обо их гибких тяго1вых органов к забою; на фиг. 6 - то же, после перемещения к забою всех обойм путем протягивания вдоль лавы соединенного с ними транспортирующего гибкого тягового органа (исходное положение на фиг.7 узел 1 на фиг.2; на фиг. 8 - вид А на фиг.7 на фиг.9 вид Б на фиг.7. При монтаже оборудования, необходимого для осуществления данного спосо ба крепления ,к рабочей 1 ветви горизонтально замкнутого вокруг обводной 2 приводной 3 звездочек транс портирующего гибкого тягового органа прикрепляют на расстоянии, равном ша ГУ установки крепи, все обоймы А, не обходимые для крепления всей лавы,
и располагают рабочую 1 ветвь с обоймами k в призабойном 5 пространстве
Выполняя таким образом перечисленные операции, протягивают из приза- , 4 лавы. В подготовительной выработке 6 располагают также лебедку 7 с намотанным на ее барабан распорным гибким тяговым органом 8. При этом конец распорного гибкого тягового органа обводят через свободно вращающийся на оси приводной звездочки обводной блочек и прикрепляют, например жимками к холостой Э ветви транспортирующего гибкого тягового органа. После развития очистных работ и вызванной в связи с этим необходимостью установки крепи производят крепление лавы следующим образом. Включив привод (на чертежах условно не показан) приводной 3 звездочки начинают протягивать рабочую 1 ветвь с прикрепленными на ней обоймами 4 из призабойного 5 в призавальное 10 пространство лавы и одновременно с этим холостой Э ветвью протягивают на лаве распорный 8 гибкий тяговой орган. После того, как обойма Ц войдет на подготовительную выработку 6 и расположится на полке (условно не показан) останавливают движение транспортирующего тягового органа и в обойму 4 размещают комплект 11 дистанционно устанавливазмой клиновой крепи. Одновременно с этим соединяют распорный 8 гибкий тяговый орган с помсхцью гибкой тяги 12 с захватом 13 комплекта 11 крепи, выполненым, например, в виде штыря, закрепленного в теле одного из клиньев комплекта 11 крепи и снабженного на конце крюкем и подпружиненной защелкой. При этом параметры (длина и толщина) штыря выбраны такими, чтобы Силы, удерживаюи е штырь в теле клина комплекта 11 крепи, несколько превышали уси/we, необходимое для распора клиновой крепи. Соединение гибкой тяги 12 с захватом 13 осуществляют одним из известных способов, например, путем набрасывания звена цепи гибкой тяги 12 на клюк захвата 13 и закрепления наброшенного звена цепи на крюке с помощью подпружиненной защелки. После соединения гибкой тяги 12 с захватом 13 возобновляют движение транспортирующего гибкого тягового органа. бойного 5 пространства лавы рабочую Iветвь транспортирующего гибкого тягового органа и располагают все обоймы с размещенными в них компл тами tl крепи в призабойном 10 пространстве лавы на месте их установки в возводимом ряду крепи. При этом распорный 8 гибкий тяго вый орган гибкими тягами 12 будет соединен с захватами 13 всех комплектов 11 крепи, а конец распорного 8 гибкого тягового органа выйдет на вторую 1 подготовительную выработку. Затем на холостой 9 ветви траисп тирующего гибкого тягового органа ослабляют жимки, с помощью которых к ней был прикреплен конец распорно го 8 гибкого тягового органа с тем, чтобы он мог проскальзывать по холостой 9 ветви и, включив лебедку 7 начинают протягивать распорный 8 гибкий тяговый орган. При этом гибкие тяги 12, соедине (ные с захватами 13 всех комплектов крепи,перемещают верхний 15 клин ко плекта 11 крепи относительно нижнег 16 клина, в результате чего будет осуществлен распор одновременно всех комплектов 1I крепи. При перемещении верхнего клина 1 последний удерживается от боковых смещений стенками обоймы 4. Продолжая протягивание распорного 8 гибкого тягового органа, про изводят отсоединение всех гибких тяг 12 с захватами 13 от комплектов IIкрепи. Это достигается путем выдергивания захватов 13 из тела комплектов 11 крепи, которое произойдет после натяжения распорного гибкого тягового 8 с усилием достаточным для выдергивания захвата 13 из тела верхнего клина 15 ком лекта 11 крепи, При этом об отсоединении всех гиб ких тяг 12 с захватами 13 судят по ослаблению натяжения распорного 8 гибкого тягового органа. После отсоединения всех гибких тяг 12 с захватами 13 лебедку 7 останавливают, реверсируют направле ние движения транспортирующего гибкого тягового органа и, протягивая последний на расстояние, равное половине шага установки комплектов крепи в лаве по падению, располагают все обоймы k между комплектами 11 крепи. После выемки очередной полосы угля в лаве оба гибкие тяговые органы перемещают к забою лавы путем передвижки обводной 2 и приводной 3 звездочек с приводом. Затем включают привод вращений транспортирующего гибкого тягового органа и возвращают рабочую 1 последнего вместе с прикрепленными к ней обоймами А в призабойное 3 пространство лавы. Описанным способом осуществлжот установку всех последующих рядов крепи. При реализац11Й данного способа крепления достигается сокращение холостых обойм в лаве, а также одновременный распор комплек тов крепи, что сокращает время и повышает скорость крепления. Формула изобретения Способ крепления лавы клиновой iкрепью, включающий размещение в обоймах в подготовительной выработке комплектов крепи, их доставку к месту крепления в лаве и установку по падению с принятым шагом в обоймах путем . протягивания соединенного с обоймами транспортирующего гибкого тя ового органа, протягивание одновременно с последним распорного гибкого тягового органа, распор путем его натяжения комплектов крепи, разгрузку от комплектов крепи обойм путем перемещения их вдоль лавы в обратном направлении транспортирующим гибким тяговым органом и перемещение обоих гибких тяговых органов к забою, отличающийся тем, что, с целью повышения производительности крепления путем уменьшения количества и совмещения операций в циклах по (феплению, распорный гибкий тяговый ррган при протягивании соединяют в подготовительной выработке последовательно со всеми размещенными в обоймах комплектами крепи с возможностью автоматического рассоединения при достижении в нем заданного усилия натяжения, распор всех комплектов крепи производят одновременно и доводят усилие в распорном гибком тяговом органе до величины, соответствующей расс&ед инению его с комплектами крепи , при этом перемещение обойм вдоль лавы в обратном направлении транспортирующим гибким тяговым органом производят на величину, равную половине шага установки комплектов крепи в лаве по падению, а после перемещения обоих гибких тяговых органов к забою производят перемещение к забою всех обойм путем протягивания вдоль лавы соединенного с ними транспортирующего гибкого тягового органа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № , кл. Е 21 D , . Авторское свидетельство СССР Я 376570, кл. Е 21 D 15/28, 1971 (прототип).
---4
Т
fj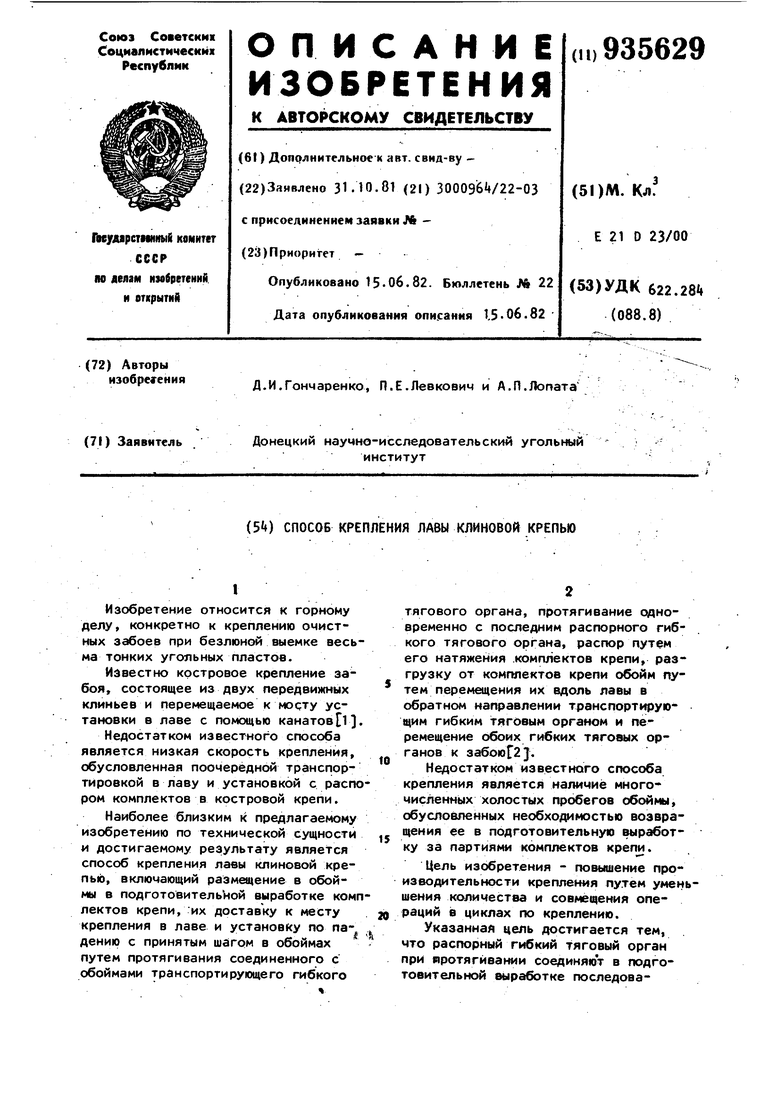
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ крепления очистной выработки клиновой крепью и устройство для его осуществления | 1980 |
|
SU861627A1 |
| Установщик клиновой крепи | 1982 |
|
SU1104290A1 |
| Способ крепления лавы клиновой крепью | 1980 |
|
SU866212A1 |
| Устройство для дистанционного возведения клиновой крепи в очистном забое | 1983 |
|
SU1134728A1 |
| Устройство для возведения стоечной крепи в очистном забое | 1985 |
|
SU1312178A1 |
| Устройство для возведения крепи в очистном забое | 1980 |
|
SU947435A1 |
| Временная крепь для подготовительных выработок | 1990 |
|
SU1744262A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ВОЗВЕДЕНИЯ КЛИНОВОЙ КРЕПИ | 1991 |
|
RU2024763C1 |
| ГОРНОПРОХОДЧЕСКИЙ ДОБЫЧНОЙ БЛОК (МОДУЛЬ) | 2013 |
|
RU2528350C2 |
| Клиновая крепь В.В.Гловацкого | 1982 |
|
SU1052667A1 |
Фиг.8 8иП
/5
X
X
/9
X
-1
Z Jfc
f
Put.B
