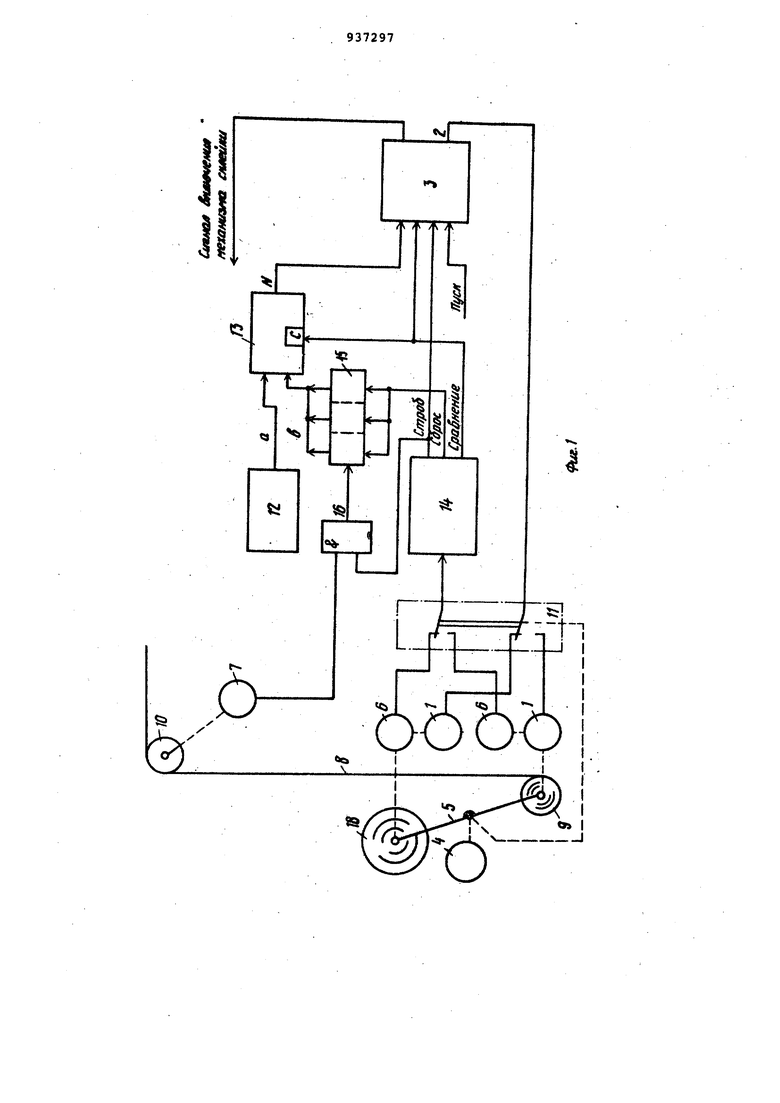
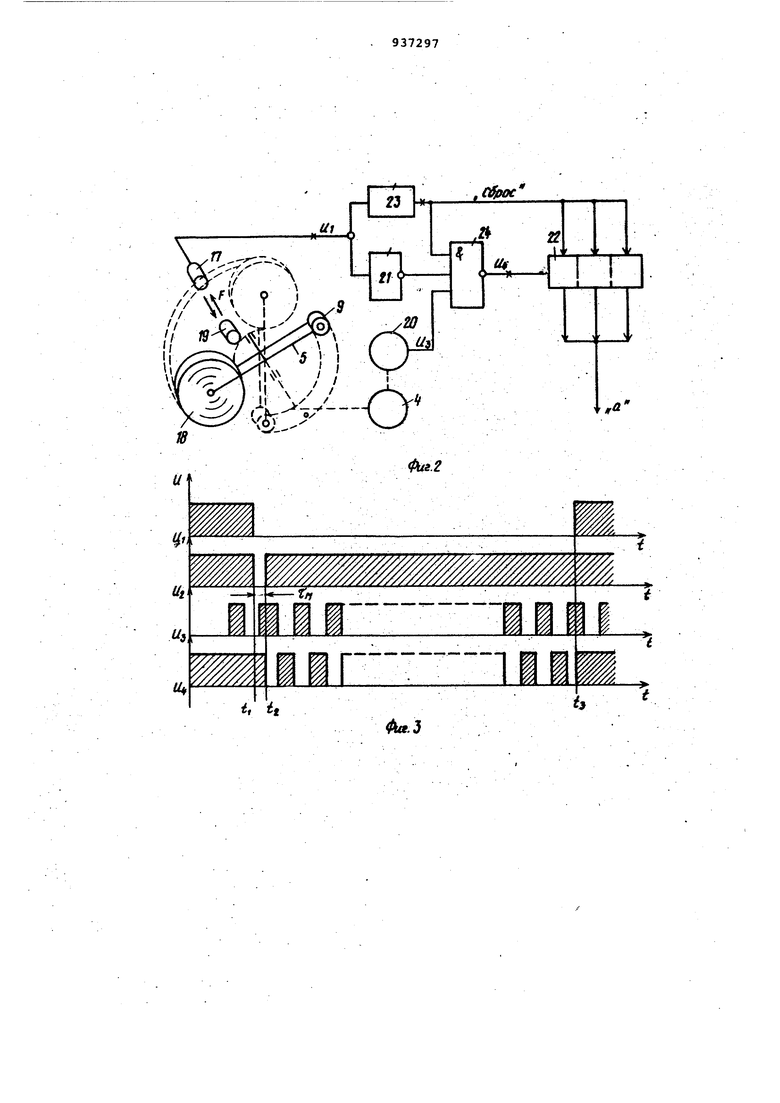
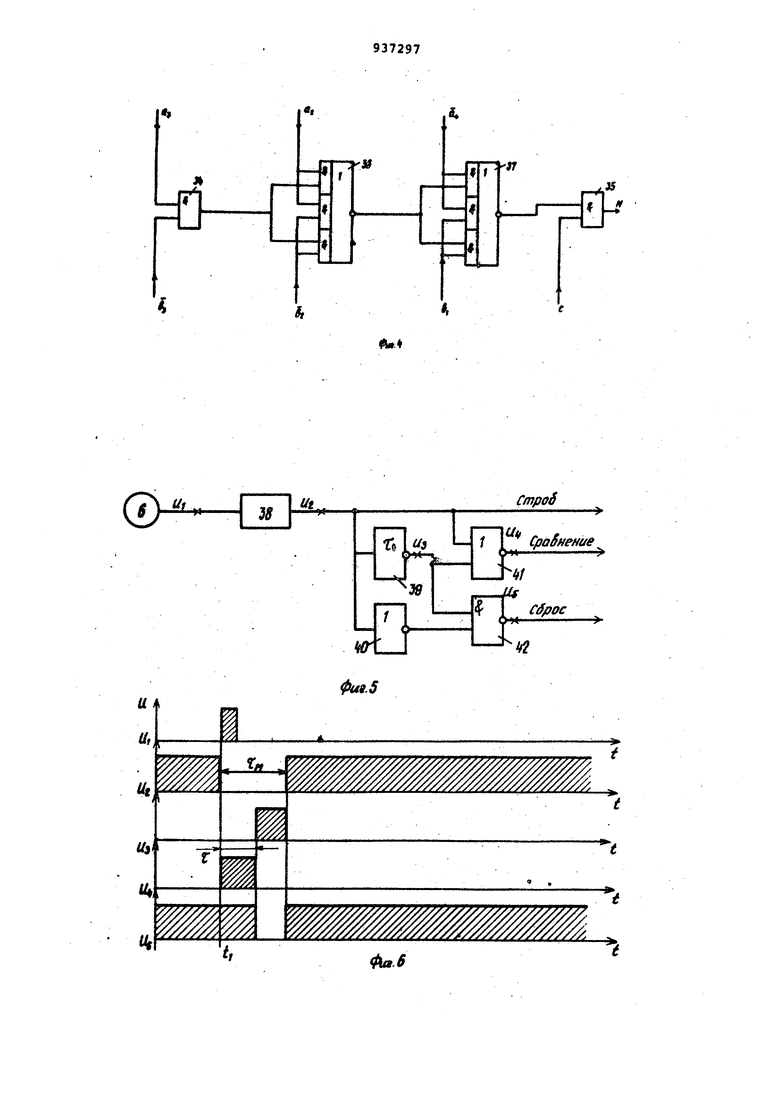
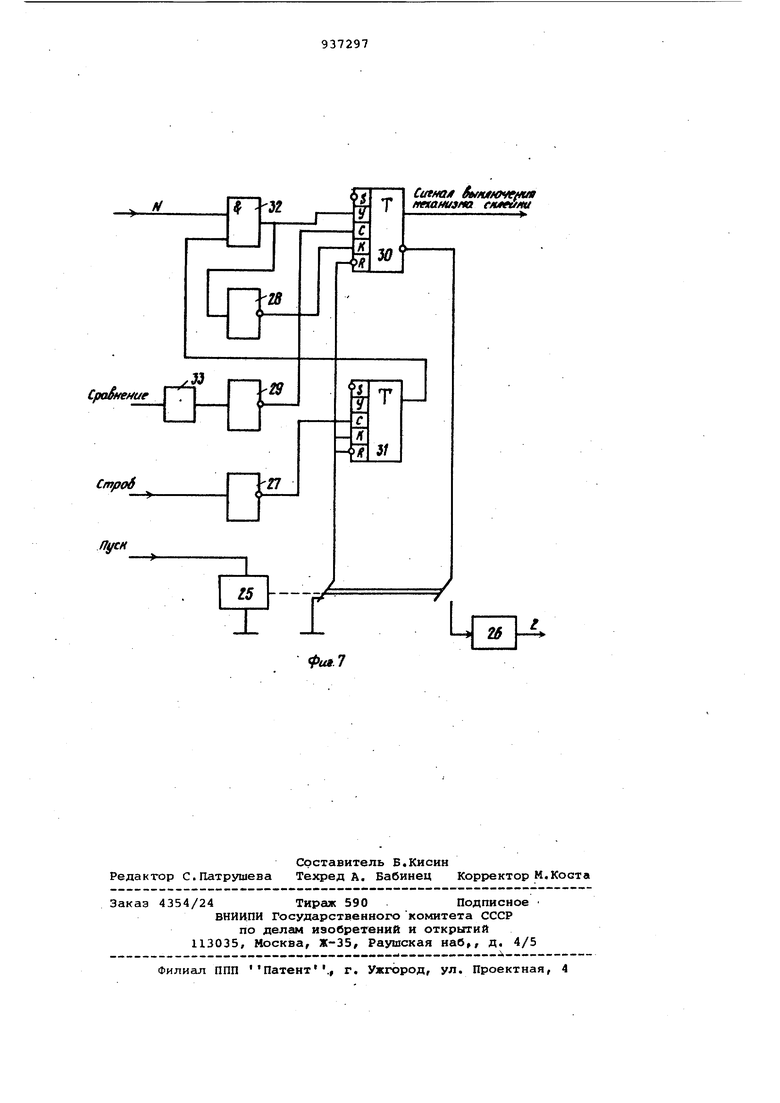
счетчик, ждущий мультивибратор и элемент НЕ, причем выход фотодатчика положения нового рулона через ждущий мультивибратор и элемент НЕ связан с первым и вторым входами элемента Й-НЕ, третий вход которо го соединен с датчиком угла поворота рулонной звеэды, а выход подключвн к счетному входу двоичного счет чика, сбросовым входом связанного с выходом ждущего мультивибратора, На фиг.1 изображена структурная схема устройства; на фиг.2 - структурная схема эадатчика радиуса рулона; на фиг.З - временная диаграм.ма работы эадатчика радиуса рулона; на фиг.4 - функциональная схема для узла выделения большего числа; на. фиг.5 - функциональная схема формирователя команд; на фиг,б - временная диаграмма работы формирователя команд; на фиг.7 - функциональная схема блока управления. Устройство для регулирований ско рости нов,ого рулона при автомртичес ;кой склейке полотен в рулонной пе, чатной машине (фиг,1) включает два электродвигателя 1 рулона, подключенных к выходу 2 блока 3 управления, электродвигатель 4 рулонной звезды 5, два датчика 6 частоты вра щения рулона, датчик 7 скорости полотна 8, разматываемого с остаточного рулона 9 и проводимого по бумаговедущему валику 10, с которым связан датчик 7, кулачковый механизм 11, связанный с осью вращения рулонной звезды 5 и служащий для се лективного включения двигателей 1 и датчиков 6 в зависимости от того, н котором из двух свободных лучей дву лучевой звезды 5 будет произведена склейка, задатчик 12 радиуса рулона и цифровой вычислительный блок, сос тоящий из узла 13 выделения большего числа, формирователя 14 команд, двоичного счетчика 15 и логического элемента И 16. Датчики 6 частоты вращения рулон и датчик 7 скорости полотна могут состоять, например, из зубчатого ко леса, выполненного из ферромагнитного материала, и электромагнита, Задатчик 12 радиуса рулона (фиг, содержит фотодатчик 17 положения но вого рулона 13, осветитель 19, посылающий на фотодатчик 17 световой поток Р , датчик 20 угла поворота ру лонной звезды 5, состоящий, например, из ферромагнитного зубчатого колёса и электромагнита,логический элемент НЕ 21, двоичный счетчик 22, ждущий мультивибратор 23, формирующий импульсы сброса счетчика 22, и-логический элемент ЗИ-НЕ 24,позволяющий стробировать импульсную последо.вательность с датчика 20 сиг налами фотодатчика 17. При этом выход фотодатчика 17 положения нового рулона через ждущий мультивибратор 23 и элемент НЕ 21 связан с первым и вторым входами элемента ЗИ-НЕ 24, тогда как третий вход последнего соединен с датчиком 20 угла поворота рулонной звезды, а выход подключен к счетному входу двоичного счетчика 22, сбросовый вход которого связан с выходом ждущего мультивибратора 23. Узел 13 выделения большего числа содержит (фиг.4) логические элементы И 34, 35 и логические элементы 2И-ЗЙЛИ-НЕ 36, 37 и своим первым входом связан с выходом двоичного счетчика 15, а вторым и третьим входами подключен соответственно к выходу задатчика 12 радиуса рулона и ко второму выходу формирователя 14 команд. Выход узла 13 электрически связан с первым входом блока 3 управления. Формирователь 14 команд состоит (фиг.5) из ждущего мультивибратора 38, элемента 39 задержки времени, логического элемента уЕ 40, логического элемента ИЛИ-НЕ 41 и логического элемента И-НЕ 42. Первый выход формирователя 14 команд, как и выход датчика 7 скорости полотна, через элемент И 16 связан со счетным входом двоичного счетчика 15, а первый и второй выходы связаны соответственно со вторым и третьим выходами блока 3 управления, при этом третий выход подключен к сбросовому входу двоичного счетчика 15. Вход формирователя 14 команд соединен с выходом датчика б частоты вращения рулона. . Блок 3 управления (фиг.7) включает электромагнитное реле 25, усилитель 26,логические элементы НЕ 2729, триггеры 30 и 31, логический элемент: И 32 и элемент 33 задержки времени. .Устройство работает следующим образом. В устройстве для регулирования скорости нового рулона учтено, что радиус нового рулона 18 во время цикла разгона остается постоянным и может быть измерен заранее во время установления этого рулона. Кроме того, известна зависимость между окружной скоростью рулона Vf, угловой частотой вращения «f и радиусом R Vp-R-U) (.0 Условиесинхронности, т.е. равенс ва окружной скорости нового рулона 18 и скорости полотна 8, можно представить следующим образом. VP Vn,(2) где Vj, - скорость полотна. Тогда f R.UU,- R Равенство (3) представляет собой условие синхронности, за выполнение которого следит цифровой вычислител ный блок. Для ввода в цифровой вычислитель ный блок величина радиуса R нового рулона 18 представляется в виде дво ичного числа а, пропорционального радиусу рулона, с помощью задатчика 12 радиуса , где к - коэффициент пропорциональности, зависящий от харакристик задатчика 12 радиу са. Величин VP и сг; преобразуются в импульсные последовательности с помощью импульсных датчиков 6 и 7, связанных соответственно с осью вращения нового рулона 18 и осью вращения бумаговедущего валика 10. Правая часть равенства (3) формируется также в виде двоичного чис ла b на выходе счетчика 15 при помо щи логического элемента и 16, стробирующего импульсную последовательность с датчика 7 импульсами Стро формируемыми формирователем 14 команд из импульсов датчика 6. где К- - коэффициент пропорциональности, зависящий от параме ров датчиков 6 и 7. Непосредственным органом, следящим за выполнением равенства (3) с достаточной точностью, является узе 13 выделения большего числа, на вхо ды которого поступсцот числа а к -в . Когда остаточный рулон 9, с которого бумажное полотно 8 подается в печатную машину, достигает минимального заданного диаметра, рулонная звезда 5, несущая новый 18 и остаточный 9 рулоны, поворачивается в положение склейки двигателем 4, после чего необходимо разогнать новый рулон 18 до скорости полотна 8. Процесс разгона рулона начинается после поступления команды Пуск например, из системы управления печатной машины, на вход блока 3 управления. В результате этого сигнал управления с выхода 2 блока 3 управ ления через замкнутый контакт .кулачкового механизма 11 поступает на двигатель 1 нового рулона. 18. Новый рулон 18 начинает вращаться вокруг своей оси, и после его поворота на некоторый угол датчик б выдает первый импульс на вход формирователя Команд 14, генерирующего сигналы Сгроб, Сброс и Сравнение. Сигнал Сброс поступает на сбросовый вход двоичного счетчика 15 и устанавливает его в исходное qocтoяниe, сигнал Строб поступает на вход блока 3 управления, также приводя его в исхбдное состояние. Одновременно с этим импульсы с датчика 7 через логический элемент 16 поступают на счетный вход двоичного счетчика 15. По завершении регламентированной части оборота, зависящей от параметров датчика 6, с последнего через замкнутый контакт кулачкового механизма 11 вновь поступит импульс на вход формирователя 14 команд, генерирующего сигналы Строб, Сброс, Сравнение. Сигнал Строб поступает на вход .элемента 16 и на вход блока 3 управления. Сигнал Сравнение поступает на вход синхронизации С узла 13 выделения большего числа и на вход блока 3 управления. С поступлением сигнала Строб на вход элемента 16 происходит запрет прохождения импульсов с датчика 7 на вход двоичного счетчика 15, при этом на выходе этого счетчика будет сформировано некоторое двсжчное число Ь, поступающее на вход узла 13 выделения большего числа. На второй вход узла 13 посто-. янно подается двоичное число а с за-. датчика 12 радиуса рулона. С поступлением сигнала Сравнение на вход С узла 13 последний выпо.пняет функцию сравнения чисел о и t) . Если число д больше числа Ь, на выходе узла 13 сигнал Логический О не изменяется, т.е. N О, и этот сигнал поступает На вход блока 3 управления. В результате сигнал на выходе 2 блока 3 управления тоже не изменяется. Рассмотренный случай соотношения чисел а и Ъ соответствует начальному этапу цикла разгона рулона 18, когда скорость его периферии ниже скорости полотна 8. В результате монотонного увеличения частоты вращения рулона 18 уменьшается период следования импульсов с датчика 6, т.е.. время, в течение которого разрешено прохождение импульсов с датчика 7 на вход двоичного счетчика 15. Это ведет к монотоннсяиу уменьшению величины чисел Ь. Наступает момент, когда число Ь становится меньше числАР, и после очередного поступления импульса Сравнение на вход С узла 13 выделения большего числа на его выходе появится сигнал Логическая 1, и этот сигнал поступает на вход блока 3 управления. Сигнал Сравнение также поступает на вход блока 3 управления. При таKOft комбинации сигналов на выходе блока 3 произойдет снятие сигнала управления, т.е. отключение двигателя 1 рулона. Одновременно с этим на выходе блока 3 появится сигнал Логическая 1 /который может быт использован, для включения механизма склейки полотен. В рассшотренном случае, окружная скорость нового рулона 19 равна ско рости полотна 8. В дальнейшем работа устройства аналогична двум описанным случаям, благодаря чему поддерживается равенство окружной скорости нового рулона 19 и скорости полотна 8. После окончания цикла склейки сигнал Пуск со входа блока 3 уп равления . снимается, что приводит к отключению двигателя 1, независимо от состояния других входов блока 3 управления. Задатчик 12 радиуса рулона работает следующим образом. При повороте рулонной звезды 5 двигателем 4 в положение склейки но вый рулон 18 пересекает светдвой по TOfc F, идущий от осветителя 19, и экранирует фотодатчик 17 положения рулона. После прерывания светового потока рулоном 18 в момент времени t (фиг.З) и окончания импульса сброса в момент времени электрические импульсы с датчика 20 угла поворота рулонной звезды 5 nocTyna- ют через элемент ЗИ-НЕ 24 на вход двоичного счетчика 22, а в момент времени t, когда рулон 18 выходит из светового потока, фотодатчик 17 засвечивается, и прохождение импуль сов на вход счетчика 22 запрещается Операция запрета возможна благодаря наличию связи фотодатчика 17 со вхо дом элемента 24 через элемент 21. Таким образом, на вьлходе сче тчика 2 формируется двоичное число а, величина которого пропорциональна радиу су рулона 18. Ждущий мультивибратор 23 формирует сигнал Сброс длительностью Тдд , необходимые дл|г установки счетчика в исходное состояние при последующих циклах измерени радиусов новых рулонов. Блок 3 управления работает следующим образом. При поступлении команды Пуск на его вход срабатывает реле 25, размыка1ощий контакт которого разрыв ет цепь начальной установки триггеров 30 и 31,а в результате замыкани замыкающего контакта с инверсного в хода триггера 30 сигнал Логическа поступает на выход 2 блока 3 уп равления. С поступлением на вход бло управления первого сигнала Строб этот сигнал поступает также и на вход НЕ 27, с выхода которого сигнал синхронизации подается на вход С триггера 31 и изменяет его начальное состояние; при этом на прямом выходе триггера 31 появляется сигнал Логическая 1, поступающий на вход логического элементами 32. При дальнейшей работе состояние триггера 31 не меняется. Сигналы Сравнение поступают на вход блока 3 управления. Элемент 33 задержки времени и элемент НЕ 29 из сигналов Сравнение формируют импульсы cинkpoнизaции, поступающие на вгод С триггера 30. На вход блока 3 поступает сигнал, зависящий от значения дискретной функции N. При N О на вход блока 3 и вход элемента 32 поступает сигнал Логический О , при этом на выходе элемента 32 также будет присутствовать, сигнал Ло.даический О , поступающий на вход J триггера 30 и вход элемента НЕ 28. С выхода элемента 28 сигнал Логическая 1 поступает на вход К триггера 30. Благодаря такой комбинации сигналов на входах Д и К триггера 30 импульсы синхронизации, поступающие на его вход С, постоянно стремятся установить триггер 30 в начальное состояние, при котором на его прямом выходе присутствует сигнал Логический О , а на инверсном выходе Логическая 1 . При N .1 на вход блока 3 и вход элемента И 32 поступает сигнал Логическая 1. Это вызывает появление сигналов Логическая 1 на входе I и Логический О на входе К триггера 30, в результате чего при поступлении сигнала синхронизации на вход С триггера 30 последний изменяет свое начальное состояние. При этом на его прямом выходе и выходе блока 3 появляется сигнал Логическая 1, а на инверсном выходе - Логический О , что вызывает снятие сигнала управления на выходе усилителя 26 и выходе 2 блока 3 управления. При дальнейшей работе состояние триггера 30 и выходные сигналы блока управления 3 полностью определяются значением сигнала на входе (выход узла 13) блока 3 управления к моменту времени, определяемому поступлением сигнала Сравнение на вход блока 3 управления и параметрами элемента 33 задержки времени. Узел 13 вьвделения большего числа работает следующем образом. На входы01 и PI, 05 логических элементов 34, Зби «37 поступает соответственно в инверсном и прямом / виде разря; двоичного числа q . На входы Ь и Ь, БЗ поступают соответственно и прямом и инверсном виде разряды двоичного числа Ь. Нэ вход С синхронизации поступает сигн, разрешающий поступление информ ции на вход узла 13. Логическая схе ма узла 13, состоящая из элементов 34 - 37 реализует зависимость м|а7Ъ |с-- , где Ni- дискретная функция выхода; С - вход синхронизации; d ub-i- сравниваемые чИсла, причем Ь являются их старшими разрядами соответственно. Формирователь команд 14 работает так. С датчика 6 час1:оты вращения рулона на вход ждущего мультивибратора 38 поступают положительные импульсы. Под их действием мультивибратор 38 вырабатывает отрицательные импульсы длительностью fyn (фиг.б),, которые поступсцох на логическую час схемы формирователя, содержащую эле мент 39 задержки времени, логически элементы НЕ 40, ИЛИ-НЕ 41, И-НЕ 42. Процесс формирования команд протека в схеме в соответствии с временной диаграммой. Экономический эффект от использо вания данного устройства определяет его высокой точностью регулирования Формула изобретения 1. Устройство для регулирования скорости HOBorq рулона при автомати ческой (Йслейке полотен в рулонной печатной машине, содержащее электро двигатель рулона, подключенный к блоку управления, электродвигатель рулонной звезды, датчик частоты вращения рулона и датчик скорости полотна, отличающееся тем, что, с целью повышения точности регулирования, оно имеет задатчи радиуса рулона и цифровой вычислительный блок,состоящий из узла выделения большего числа, формирователя команд, двоичного счетчика, и элемента И, при этом первый выход формирователя команд и выход датчика скорости полотна через элемент И связаны со счетным входом двоичного счетчика, выходом связанного с первым входом узла выделения большего числа, второй и третий входы которого соответственно подключены к выходу задатчика ргщиуса рулона и к второму выходу формирователя команд, а выход электрически связан с первым входом блока управления, выход датчика частоты йращения рулонА соединен с входом формирователя команд, первым и вторым выходами соответ.ственно связанного с вторым и третьимвходами блока управления, причем третий выход формирователя команд подключен к сбросовому входу двоичного счетчика. 2. Устройство по п. 1, отличающееся тем, что задатчик радиуса рулона содержит фотодатчик положения нового рулона, датчик угла поворота рулонной звезды, элемент И-НЕ, ДВОИЧНЫЙ счетчик, ждущий мультивибратор и элемент НЕ, при этом выход фотодатчика положения нового рулона через ждущий мультивибратор и через элемент НЕ связан с первым и вторым входами элемента И-НЕ, третий вход которого соединен с датчиком угла поворота рулонной звезды, а выход подключен к счетному входу двоичного счетчика, сбросовым входом связанного с выходом ждущего мультивибратора. Источники информации, принятые во внимание при экспертизе 1. Патент СЗДА 3298622, кл. 242-58.1, 1967.
Ul J
т y.
I V/ гЧ
.u
2
Of
о H
tiT--ЙУ
A«f
i{. «f.
J
Ьг

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для управления робототизированным комплексом | 1985 |
|
SU1278203A1 |
| СПОСОБ ПОМОЩИ ВОДИТЕЛЯМ ПРИ ПЕРЕСТРОЕНИЯХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2646782C2 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство для счета движущихся предметов | 1980 |
|
SU920786A1 |
| СПОСОБ ТРЕНИРОВКИ СТРЕЛКА НА СТЕНДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2046272C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| Устройство подачи рулонной бумаги на печать | 1986 |
|
SU1440747A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
Фи9.5
i,
Ф.6
