Изобретение относится к области вооружения, а именно к ракетной технике и, в частности, к ракетам, вращающимся по углу крена, и может быть использовано в системах наведения ракет, в которых применяются, например, лучевые системы теленаведения.
Известны способ коррекции на ракете командного сигнала и система наведения ракеты для его реализации [“Основы радиоуправления”, под ред. Вейцеля В.А. и Типугина В.Н., Москва, “Советское радио”, 1973 г., стр.276, 277, рис.5.3]. Способ коррекции командного сигнала (Uk) на ракете заключается в том, что преобразуют электромагнитное излучение с пункта управления на ракете в составляющие командного сигнала (Ukz и Uky), измеряют величину скорости полета ракеты, которой корректируют величину составляющих командного сигнала, и из корректированных составляющих вырабатывают командный сигнал управления ракетой.
Система наведения ракеты содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выходы по курсу и тангажу которого через корректирующий блок (блок поправки на скорость) соединены, соответственно, с первым и вторым входами автопилота, при этом третий вход корректирующего блока подключен к устройству измерения скорости полета ракеты.
В блок выделения координат входят канал сигнала ошибки, блок поправки на угол крена, опорный канал и преобразователь координат, а в автопилот - устройство формирования команд. Такая функциональная разбивка блоков в известном устройстве позволяет объединять системы теленаведения по лучу, основанные на круговом сканировании в пространстве диаграммы направленности луча, на сканировании в пространстве информационного луча в вертикальной и горизонтальной плоскостях, на проецировании в пространство "информационных" картинок, сформированных растрами, при котором отсутствует сканирование луча и т.д.
В этом известном способе коррекции на ракете командного сигнала и системе наведения ракеты, основанной на нем, изменяют величины координат Ukz и Ukу, а значит и командного сигнала управления ракетой в зависимости от величины скорости полета ракеты (υcн), оказывающей влияние на эффективность рулей.
Величину скорости полета ракеты получают, например, путем интегрирования сигнала линейного ускорения, измеряемого с помощью акселерометра [“Основы радиоуправления”, под ред. Вейцеля В.А. и Типугина В.Н., Москва, “Советское радио”, 1973 г., стр.52, 53, рис.1.31], основанного на перемещении груза m относительно корпуса снаряда, механически связанного с токосъемником потенциометра.
Следовательно, недостатком известного способа коррекции на ракете командного сигнала и системы наведения ракеты, его реализующей, является сложность, а главное - необходимость наличия на борту ракеты дополнительного нового устройства, которое должно измерять только скорость полета ракеты, что снижает надежность.
Задачей настоящего изобретения является повышение надежности за счет использования датчика крена на ракете, вращающейся по углу крена, дополнительно для измерения угловой скорости вращения ракеты вокруг своей оси, пропорциональной скорости полета, и корректировки по величине угловой скорости величины командного сигнала управления ракетой.
Поставленная задача решается в способе коррекции командного сигнала на ракете, вращающейся по углу крена, за счет того, что электромагнитное излучение с пункта управления преобразуют на ракете в составляющие командного сигнала, корректируют их и из корректированных значений формируют командный сигнал, при этом на ракете вырабатывают креновый сигнал в виде электрических импульсов, длительности которых формируют равные по величине угловые интервалы, образуемые при вращении ракеты по углу крена, преобразуют длительность каждого импульса в двоичное число, величиной которого корректируют величины составляющих командного сигнала.
Система наведения ракеты, основанная на этом способе, содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выходы по курсу и тангажу которого через первый и второй корректирующие блоки соединены, соответственно, с первым и вторым входами автопилота; в нее введены последовательно включенные датчик угла крена и преобразователь “длительность-код”, при этом выход датчика угла крена соединен с третьим входом автопилота, а выход преобразователя “длительность-код” подключен ко вторым входам первого и второго корректирующих блоков.
В предлагаемом изобретении заявленный способ реализуется следующим образом. Электромагнитное излучение с пункта управления на ракете преобразуют в составляющие командного сигнала, например электрические сигналы (напряжения), соответствующие величинам координат по курсу и тангажу (Ukz и Uky, соответственно) относительно нуля декартовой системы координат пункта управления, при этом нуль координат соответствует точке прицеливания. Затем корректируют значения величин составляющих командного сигнала, например, путем изменения коэффициентов передачи. Поскольку ракета в полете вращается по углу крена, например, за счет разворота лопастей стабилизаторов, то датчиком угла крена на ракете формируют креновый сигнал, который преобразует электрические сигналы корректированных величин составляющих командного сигнала Ukz и Uky, т.е. координаты ракеты по курсу и тангажу, из декартовой системы координат пункта управления в декартовые либо полярные координаты ракеты, вращающиеся вместе с ракетой.
Таким образом, при формировании командного сигнала используют вырабатываемый на ракете креновый сигнал. Этот сигнал представляет собой электрические импульсы. Длительности импульсов формируют равные по величине угловые интервалы ϕ, образуемые при вращении ракеты по углу крена, при этом

где ω - угловая скорость вращения ракеты вокруг своей оси,
t - время, в течение которого формируется угол ϕ, т.е. длительность креновых импульсов.
Поскольку траектория полета ракеты представляет собой винтовое движение, слагаемое из прямолинейного поступательного движения со скоростью υ и вращением с угловой скоростью ω то

где р - параметр винта (стабилизаторов), создающих вращательное движение.
Таким образом, с учетом (1),
Поскольку р=const и ϕ=const, то
где k=p·ϕ=const, следовательно, скорость полета ракеты υ обратно пропорциональна длительности креновых импульсов t.
Длительность креновых импульсов t преобразуют в двоичное число, которым корректируют величины составляющих командного сигнала, например увеличивают коэффициент передачи при увеличении двоичного числа. Из корректированных значений величин координат формируют командный сигнал (команду управления ракетой) с учетом крена ракеты.
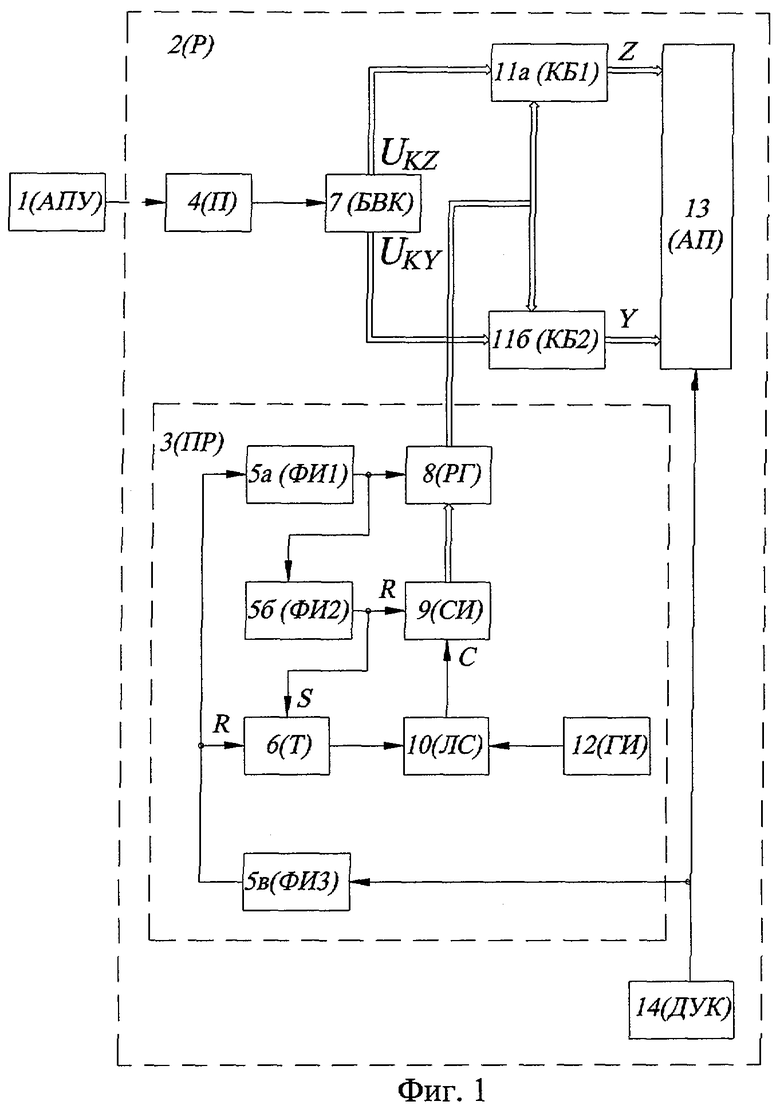
Предлагаемое изобретение поясняется чертежами (фиг.1 и 2). На фиг.1 представлена структурная электрическая схема системы наведения ракеты, где 1 - аппаратура пункта управления (АПУ), 2 - ракета (P), 3 - преобразователь “длительность-код” (ПР), 4 - приемник (П), 5а, 5б и 5в - соответственно, первый (ФИ1), второй (ФИ2) и третий (ФИ3) формирователи импульсов, 6 - “RS”-триггер (Т), 7 - блок выделения координат (БВК), 8 - регистр (РГ), 9 - счетчик импульсов (СИ), 10 - логическая схема “И” (ЛС), 11а и 11б - соответственно, первый (КБ1) и второй (КБ2) корректирующие блоки, 12 - генератор импульсов (ГИ), 13 - автопилот (АП), 14 - датчик угла крена (ДУК).
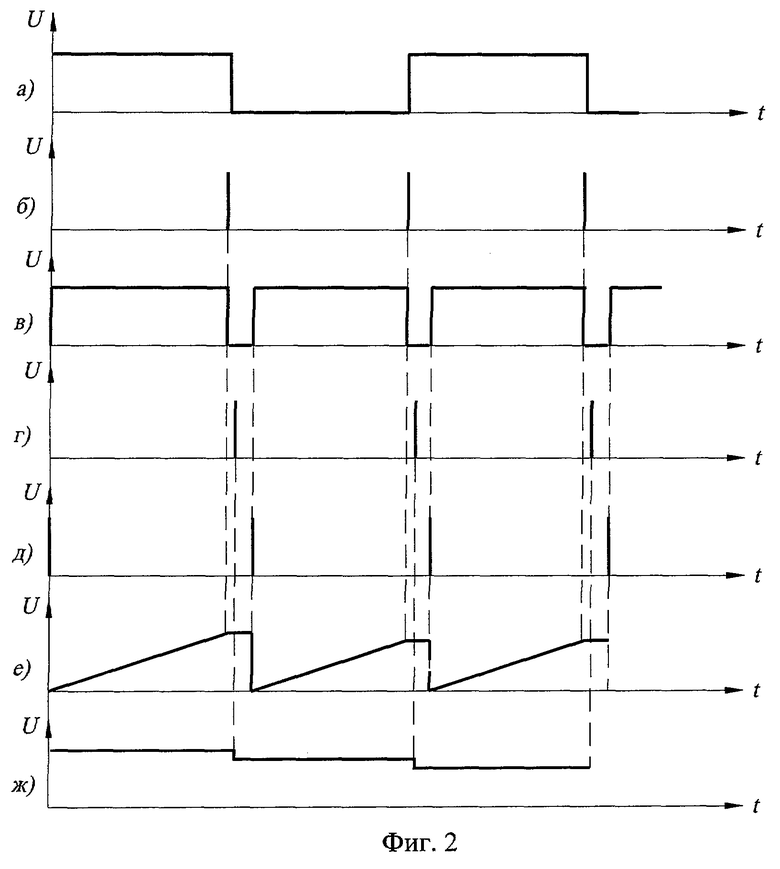
На фиг.2 представлены эпюры сигналов, где а - сигнал на выходе датчика угла крена 14, б - сигнал на выходе третьего формирователя импульсов 5в, в - сигнал на выходе “RS”-триггера 6, г - сигнал на выходе второго формирователя импульсов 5б, д - сигнал на выходе первого формирователя импульсов 5 а, е - сигнал на выходе счетчика импульсов 9 (в аналоговом виде), ж - сигнал на выходе регистра 8 (в аналоговом виде).
На ракете 2 последовательно включены приемник 4 и блок выделения координат 7, выходы по курсу “Z” и тангажу “Y” которого через первый 11а и второй 11б корректирующие блоки соединены, соответственно, с первым и вторым входом автопилота 13. Последовательно включены датчик угла крена 14 и преобразователь “длительность-код” 3. Выход датчика крена 14 соединен с третьим входом автопилота 13. Выход преобразователя “длительность-код” 3 подключен ко вторым входам первого 11а и второго 11б корректирующих блоков.
Аппаратура пункта управления 1 может быть выполнена как в известной системе наведения при сканировании диаграммы направленности, например, поочередно в двух взаимно перпендикулярных направлениях (по курсу и тангажу). Приемник 4 и блок выделения координат 7 могут быть выполнены по схеме приемного тракта, например, с времяимпульсной модуляцией (ВИМ) при оптической линии связи или с дополнительной амплитудной модуляцией (ВИМ-АМ) при радиолинии [“Основы радиоуправления”, под ред. Вейцеля В.А. и Типугина В.Н., Москва, “Советское радио”, 1973 г., стр.246-248, рис.4.28]. Соответственно с данным видом модуляции должна быть выполнена аппаратура пункта управления 1.
Пример выполнения преобразователя “длительность-код” 3 приведен на фиг.1. Первый 5а и второй 5б формирователи импульсов представляют собой, например, два последовательно включенных ждущих мультивибратора, второй из которых срабатывает по заднему фронту сигнала, формируемого первым ждущим мультивибратором. Третий формирователь импульсов 5в можно выполнить в виде двух параллельно включенных по входу ждущих мультивибраторов, первый из которых срабатывает по переднему фронту входного сигнала, а второй - по заднему, выходы первого и второго ждущих мультивибраторов подключены, соответственно, к первому и второму входам логической схемы “ИЛИ”. “RS”-триггер 6, регистр 8, счетчик импульсов 9 и логическая схема “И” 10 - обычные микросхемы, например, 564-й серии. Генератор импульсов 12, - например, стабилизированный по частоте генератор импульсов, выполненный на кварцевом резонаторе.
Первый и второй корректируемые блоки 11а и 11б могут быть выполнены идентично как программно-запоминающие устройства, например, на микросхемах 556РТ7, при этом цифровые сигналы с блоков 7 и 8 подают, соответственно, на адреса строк и столбцов этой микросхемы. Автопилот 9 выполнен как автопилот для ракеты, вращающейся по углу крена [В.А.Павлов, С.А.Понырко, Ю.М.Хованский. “Стабилизация летательных аппаратов и автопилоты”, Москва, Высшая школа, 1964 г., стр.209, рис.6.11], при этом потенциометр заменяют на преобразователь “угол-число” [В.П.Демидов, Н.Ш.Кутыев. “Управление зенитными ракетами”, Москва, Военное издательство, 1989 г., стр.286, 287, рис.10.4], который входит в состав датчика угла крена 14. Таким образом, датчик угла крена 14 может быть выполнен на гироскопе [“Основы радиоуправления”, под ред. Вейцеля В.А. и Типугина В.Н., Москва, “Советское радио”, 1973 г., стр.51, 52, рис.1.29], где вместо потенциометра используют преобразователь “угол-число”.
Заявленная система наведения ракеты работает следующим образом. Аппаратура пункта управления 1, расположенная, например, на земле, формирует поле управления, например, по закону ВИМ, при этом при изменении направления сканирования с вертикального на горизонтальное меняют рабочие сигналы с РС1 на РС2 [“Основы радиоуправления”, под ред. Вейцеля В.А. и Типугина В.Н., Москва, “Советское радио”, 1973 г., стр.246-248, рис.4.29]. При вводе ракеты 2 в луч приемник 4 преобразует электромагнитное излучение в электрические импульсы, которые поступают на вход блока выделения координат 7. Этот блок выделяет по курсу “Z” и тангажу “Y” координаты ракеты, т.е. электрический сигнал, соответствующий отклонению ракеты 2 от точки прицеливания.
С выходов по курсу “Z” и тангажу “Y” блока выделения координат 7 сигналы в двоичном параллельном коде поступают на первые входы, соответственно, первого 11а и второго 11б корректирующих блоков, с выходов которых они поступают, соответственно, на первый и второй входы (цифровые) автопилота 13.
Датчик угла крена 14 формирует, например, два импульсных сигнала, период повторения которых равен периоду вращения ракеты по углу крена, т.е. 360°. Длительности единичного и нулевого логических уровней этих сигналов равны 180°, а сдвиг по фазе между этими сигналами равен 90°. Из этих двух сигналов формируют, например, с помощью логической схемы “исключающее ИЛИ” сигнал, приведенный на фиг.2 (эпюра а). Длительности единичного и нулевого логических уровней этого сигнала одинаковы и равны 90°. Данный сигнал привязан передним фронтом первого или второго сигнала (на соответствующих входах логической схемы “исключающее ИЛИ”) к исходной фазировке командного сигнала на ракете, т.е. в каждую четверть разворота ракеты по углу крена (90°) автопилот 13 осуществляет коммутацию электрических сигналов Y и Z, например в первую четверть будет “Y”, во вторую - “Z”, в третью - “минус Y” и в четвертую - “минус Z”, в соответствие с которыми отклоняются рули ракеты 2.
В преобразователе “длительность-код” 3 сигнал с выхода датчика крена 14 (эпюра а на фиг.2) третьим формирователем импульсов 5в преобразуется в импульсы (эпюра б на фиг.2). Эти импульсы поступают на вход установки в нуль (вход “R”) “RS”-триггера 6 и устанавливают на его выходе нулевой логический уровень (эпюра в на фиг.2). Одновременно импульсы с выхода третьего формирователя импульсов 5в поступают на вход первого формирователя импульсов 5а, на выходе которого формируются задержанные импульсы (эпюра г на фиг.2). Эти импульсы поступают на вход записи регистра 8 и записывают в него информацию в двоичном параллельном коде с выхода счетчика импульсов 9. Импульсы с выхода первого формирователя импульсов 5а поступают также на вход второго формирователя импульсов 5б, импульсы с выхода которого (эпюра д на фиг.2) поступают на вход установки счетчика импульсов 9 в исходное (нулевое) состояние (эпюра е на фиг.2). Эти же импульсы поступают также на вход “S” “RS”-триггера 6 и устанавливают на его выходе единичный логический уровень (эпюра в на фиг.2)
Единичный логический уровень с выхода “RS”-триггера 6 поступает на первый вход логической схемы “И” 10, которая начинает пропускать на счетный вход счетчика импульсов 9 импульсы с выхода генератора импульсов 12. Далее весь процесс повторяется вновь.
Как следует из изложенного выше, в первоначальный момент времени исходная информация, хранимая в регистре 8, не соответствует действительной скорости полета ракеты, поэтому для ее исключения требуется вводить задержку на управление ракетой, например на раскрытие рулей.
Сигнал с выхода регистра 8 в двоичном параллельном коде поступает на объединенные вторые входы первого 11а и второго 11б корректирующих блоков и, соответственно, изменяет величины координат по курсу “Z” и тангажу “Y” на их выходах.
Следовательно, в способе коррекции командного сигнала на ракете, вращающейся по углу крена, за счет того, что на ракете вырабатывают креновый сигнал в виде электрических импульсов, длительности которых формируют равные по величине угловые интервалы, образуемые при вращении ракеты по углу крена, преобразуют длительность каждого импульса в двоичное число, величиной которого корректируют величины составляющих командного сигнала, повышена надежность за счет измерения угловой скорости вращения ракеты по крену, которой корректируют коэффициенты передачи на борту ракеты.
Введение в систему наведения ракеты последовательно включенных датчика угла крена и преобразователя “длительность-код”, при этом выход датчика угла крена соединен с третьим входом автопилота, а выход преобразователя “длительность-код” подключен ко вторым входам первого и второго корректирующих блоков, повысило надежность за счет отслеживания угловой скорости вращения ракеты по крену.
Изобретение относится к области вооружения, а именно к ракетной технике и, в частности к ракетам, вращающимся по углу крена, и может быть использовано в системах наведения ракет, в которых применяются, например, лучевые системы наведения. Технический результат - повышение надежности за счет использования угловой скорости вращения ракеты по крену в качестве регулирующей величины, которой корректируют величину командного сигнала на ракете. Предложен способ коррекции командного сигнала на ракете, вращающейся по углу крена, в котором электромагнитное излучение с пункта управления преобразуют на ракете в составляющие командного сигнала, корректируют их и из корректированных значений формируют командный сигнал. При этом на ракете вырабатывают креновый сигнал в виде электрических импульсов, длительности которых формируют равные по величине угловые интервалы, образуемые при вращении ракеты по углу крена, преобразуют длительность каждого импульса в двоичное число, величиной которого корректируют величины составляющих командного сигнала. Введение в систему наведения ракеты последовательно включенных датчика угла крена и преобразователя “длительность-код” повысило надежность за счет использования угловой скорости вращения ракеты по крену для коррекции величины командного сигнала на ракете. 2 н.п. ф-лы, 2 ил.
| Основы радиоуправления | |||
| Под ред | |||
| ВЕЙЦЕЛЯ В.А | |||
| и ТИПУГИНА В.Н | |||
| - М.: советское радио, 1973, с.276, 277 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

