1N
Изобретение относится к неразрушающим испытаниям ультразвуковым йетодом и может быть использовано в машиностроительной и других отраслях промышленности.
Известно Устройство для ультразвукового контроля изделий, содержащее преобразователь дефектоскоп, датчик расстояния, регистратор и механизм вращения изделия l.
Недостатком известного устройства является низкая производительность обработки результатов, так как необходимо учитьшарь изменение линейной скорости при перемещении преобразователя от центра к периферии.
Наиболее близким к изобретению по технической сущности и достигаемому результату явдяется устройство для ультразвукового койтрояя изделий, содержащее датчик угла поворота, последовательно соединенные датчик расстояния, блок умножения.
схему сравнения, запоминающий блок и регистратор Г2}.
Недостатком известного устройства является низкая точность определе- ния шага сканирования, которая может привести к пропускам дефектов, кроме того, этот параметр (шаг сканирования) определяется сложным путем. Цель изобретения - повышение точ(0 ности контроля.
Поставленная цель достигается тем, что устройство для.ультразвукового контроля изделий снабжено фильтром, включенным между датчи15 ком угла поворота и запоминающим
блоком, последовательно соединенными двухцолупер йодным выпрями1-елем, нуль органом и интегратором, выход которого соединен с вторым входом блока
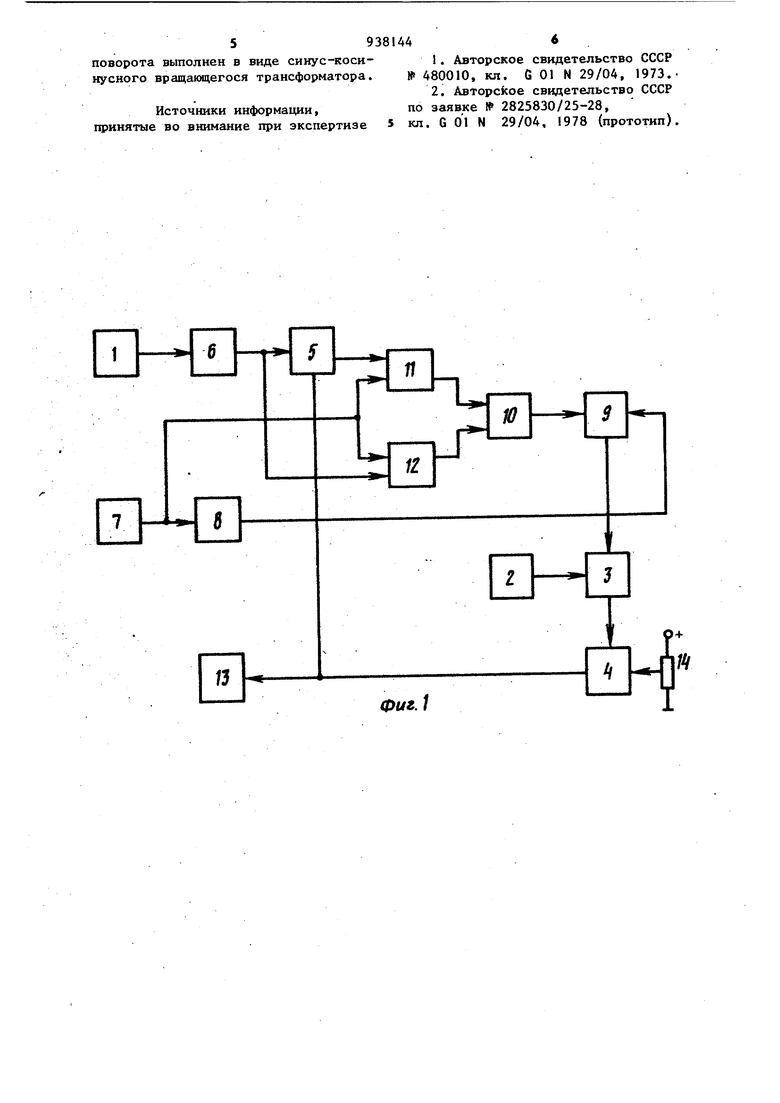
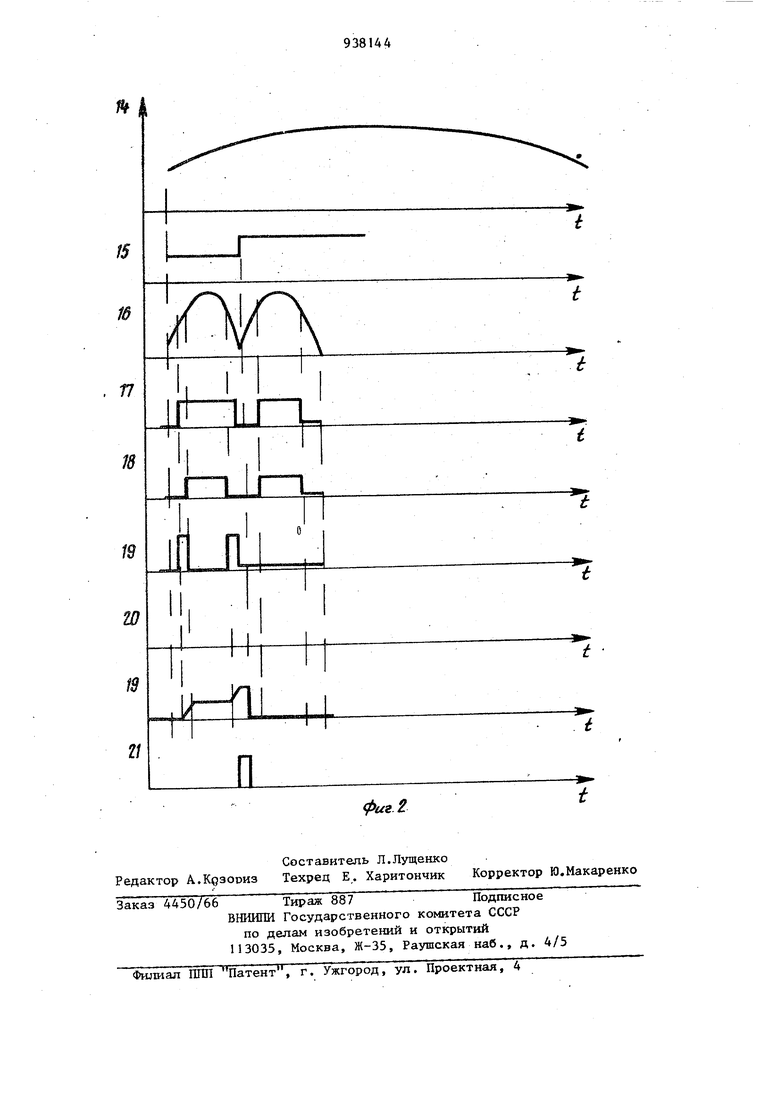
М умножения, схемой антисовпадений, шлход которой соединен с вторым входом интегратора, и двумя компараторами, включенными параллельно меязду выпрямителем и схемой антисовпадеНИИ, второй вход первого компаратора подключен к 1ходу запоминающего блока, а второй вход второго компаратора - к выходу фильтра. Кроме того, с целью упрощения измерений шага сканирования, датчик угла поворота выполнен в виде синус косинусного вращающегося тран форматора. На фиг. 1 представлена блок-схема предлагаемого устройства} на фиг. 2 - временные эпюры. Устройство для ультразвукового контроля качества изделий содержит датчик 1 угла поворота, последовательно соединенные датчик 2 расстоя ния, блок 3 умножения, схему 4 срав нения и 3 апоминакищй блок. 5. Между датчиком 1 угла поворота и запомина ющим блоком 5 включен фипьтр 6. Крюме того, устройство содержит последовательно соединенные выпрямитель 7, нуль-орган 8 и интегратор 9, выход которого соединен с вторым входом блока 3 умножения, схему 10 антисовпадений, выход которой соединен с вторым входом интегратора 9, и компараторов 11 и 12 включенных параллельно между выпрямителем 7 и схемой 10 антисовпадений. Второй вход первого компаратора 1 подключен к выходу запоминающего блока 5 , а второй вход второго компаратора 12 - к выходу филь тра 6, К выходу схемы 4 сравнения подключен регистратор 13. Датчик 1 угла поворота выполнен в виде синус косинусного вращающегося трансформа тора. Устройство работает следующим об разом. Выходное напряжение датчика 1 уг ла поворота поступает на вход фильтра 6. Выпрямленное и отфильтрованное напряжение 14 (фиг. 2) поступает на вход компаратора 12 и вход зJПo fиf aющeгo блока 5, где хранится значение напряжения 15. На вторы входы компараторов 1I и 12 поступает выпрямленное напряжение 16 вы прямителем 7, Выходное напряжение 17 компаратора 11 не меняется в те чение шага сканирования, выходное напряжение 18 компаратора 12 изменяется пррпорционально изменению фазы напряжения датчика 1 угла поворота , Для выделения сигнала, пропорцио нального разности фаз двух сравни4ваемых напряжений 14 и 15, служит схема 10 антисовпадений. Суммарная длительность импульсов на выходе схемы 10 антисовпадений пропорциональна удвоенной разности фаз Л Ч. Интегратор 9 преобразует длительность этих импульеов в амплитуду 19, причем интегратор об.нуляется каждый полупериод выходным напряжением 20 нуль-органа 8. Полученная амплитуда умножается в блоке 3умножения на величину расстояния преобразователя (на черт, не показан) до центра вращения. Затем полученный сигнал поступает на вход схемьз 4сравнения, где сравнивается с эталонным напряжением 21, который поступает на регистратор 13 и вход запоминающего блока 5, записывая текущее значение напряжения 14. В следующем полупериоде цикл повторяется. Предлагаемое устройство позволяет повысить точность контроля за счет более точного измерения шага сканирования . Формула изобретения 1. Устройство для ультразвукового контроля изделий, содержащее датчик угла поворота, последовательно соединенные датчик расстояния, блок умножения, схему сравнения и запоминающий блок, регистратор, отличающееся тем, что, с целью повышения точности контроля, оно снабжено фильтром, включенным между датчиком угла поворота и запоминакнцим блоком, последовательно соединенным двухполупериодным выпрямителем, нуль-органом и интегратором, вьрсод которого соединен с вторым входом блока умнржения схемой антисовпадений, выход которой соединен с вторым входом интегратора, и двумя компараторами, включенными параллельно между ш 1прямителем и схемой антисовпадений, второй вход первого компаратора подключен к выходу запоминающего блока, а второй вход второго компаратора - к выходу фильтра. 2. Устройство по п. 1, отличающееся тем, что, с целью упрощения измерешгй, датш{к угла
5938144«
поворота выполнен в виде синус-коек- 1. Авторское свидетельство СССР нусного вращающегося трансформатора. № 480010, кл. G 01 N 29/04, 1973.
Источники информации, по заявке № 2825830/25-28, принятые во внимание при экспертизе 5 кл. G 01 N 29/04, 1978 (прототип).
2. ABTopckoe свидетельство СССР
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой дефектоскоп | 1989 |
|
SU1640630A1 |
| Способ ультразвукового теневого контроля изделий из слоистых пластиков и устройство для его осуществления | 1987 |
|
SU1458803A1 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА РЕАКТИВНОЙ СОСТАВЛЯЮЩЕЙ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2673335C2 |
| Устройство для ультразвукового контроя изделий | 1979 |
|
SU855488A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1982 |
|
SU1101866A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| УЛЬТРАЗВУКОВОЙ ФАЗОВЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА | 2013 |
|
RU2548615C2 |
| Устройство для управления вентильным электродвигателем, выполненным на базе синхронной машины | 1987 |
|
SU1636978A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
я
/г
13
I
п
Фиг.1
