(51) УСТРОЙСТВО для ВЫРАВНИВАНИЯ УРОВНЯ КОНТРОЛЬНОЙ ПОВЕРХНОСТИ ОБЪЕКТА ОТНОСИТЕЛЬНО ОПОРНОЙ ПОВЕРХНОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического выравнивания выверяемой поверхности объекта относительно опорной поверхности и устройство для его осуществления | 1979 |
|
SU1046613A1 |
| Способ автоматического выравнивания объекта относительно опорной поверхности и устройство для его осуществления | 1976 |
|
SU612151A1 |
| Устройство выравнивания контрольной поверхности относительно опорной поверхности | 1979 |
|
SU879303A1 |
| Способ автоматического выравнивания уровня контрольной поверхности объекта относительно опорной поверхности и устройство для его осуществления | 1977 |
|
SU708147A1 |
| Устройство для автоматического выравнивания уровня объектов | 1973 |
|
SU506005A1 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| СПОСОБ ТОЧНОЙ ОСТАНОВКИ ПОЛА КАБИНЫ ЛИФТА НА УРОВНЕ ПОСАДОЧНОЙ ПЛОЩАДКИ | 2001 |
|
RU2202508C2 |
| Устройство для автоматизированного контроля соосности и центровки механических конструкций | 2016 |
|
RU2639993C1 |
| Гидростатический нивелир | 1982 |
|
SU1052863A1 |
| Система подъёма и выравнивания здания, сооружения | 2003 |
|
RU2224845C1 |
1
Устройство относится к контрольноизмерительной технике и предназначено для выравнивания технологического оборудования при его монтаже на строительно-монтажных площадках.
Известно устройство для выравнивайия уровня контрольной поверхности объекта относительно опорной, содержащее гидравлически соединенные между собой опорный и контрольные датчики, ,Q выполненные каждый в виде сосуда с рабочей жидкостью и измерительного штока, прецизионные элементы, на которых установлены измерительные штоки, исполнительные механизмы для переме- ,5 ((ения выравниваемого объекта и воздействующий на них блок автоматического регулирования, связанный с опорным И контрольными датчиками
Недостаток устройства заключается 20 том, что в процессе выравнивания каждый из контрольных датчиков и соответстаующий ему исполнительный механизм расположены в разных точках
объекта, т.е. контролируемая и непосредственно перемещаемая точки смещены друг относительно друга, поэтому при работе одного исполнительного механизма происходит перемещение не только соответствующей ему контролируемой точки, но и других, возможно уже находящихся в проектном положении, что выну хдает включать каждый из исполнительных механизмов по нескольку раз и снижает производительность процесса выравнивания. Кроме того, при выравнивании объекта, изготовленного с базированием на основание, трудно использовать основание объекта в , качестве контрольной поверхности из-за малого зазора между фундаментом и этим основанием, в который должны устанавливаться контрольные датчики и прецизионные элементы, что приводит к снижению точности монтажа.
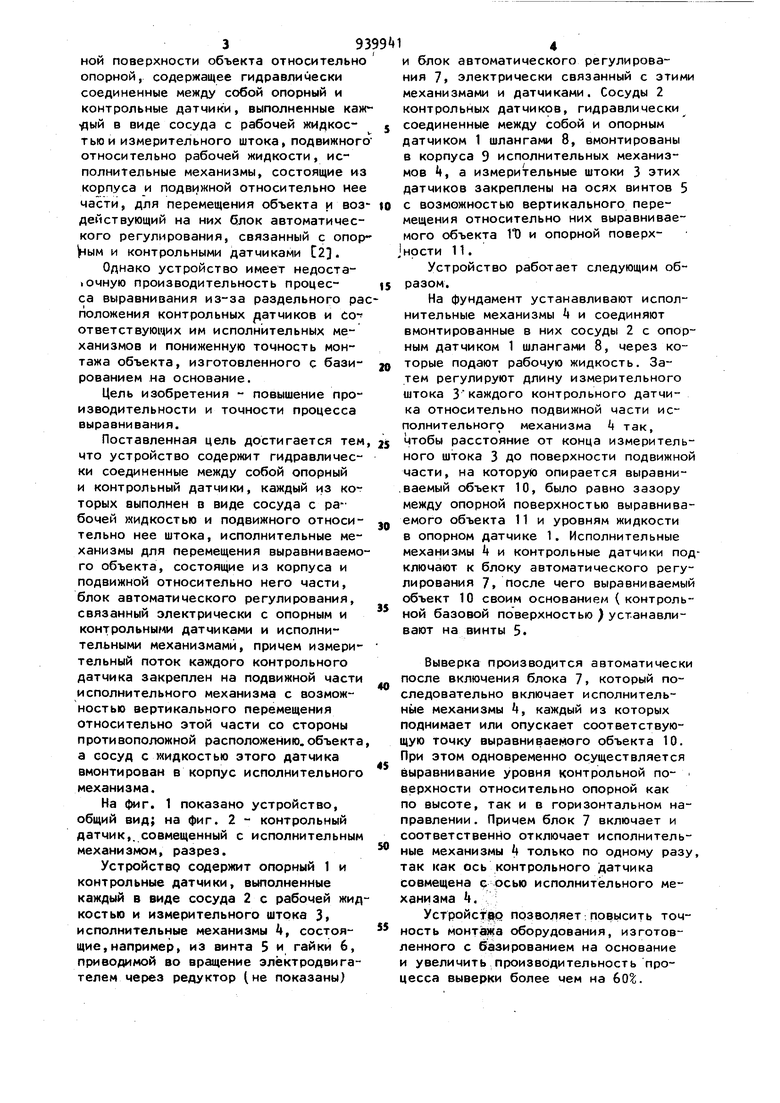
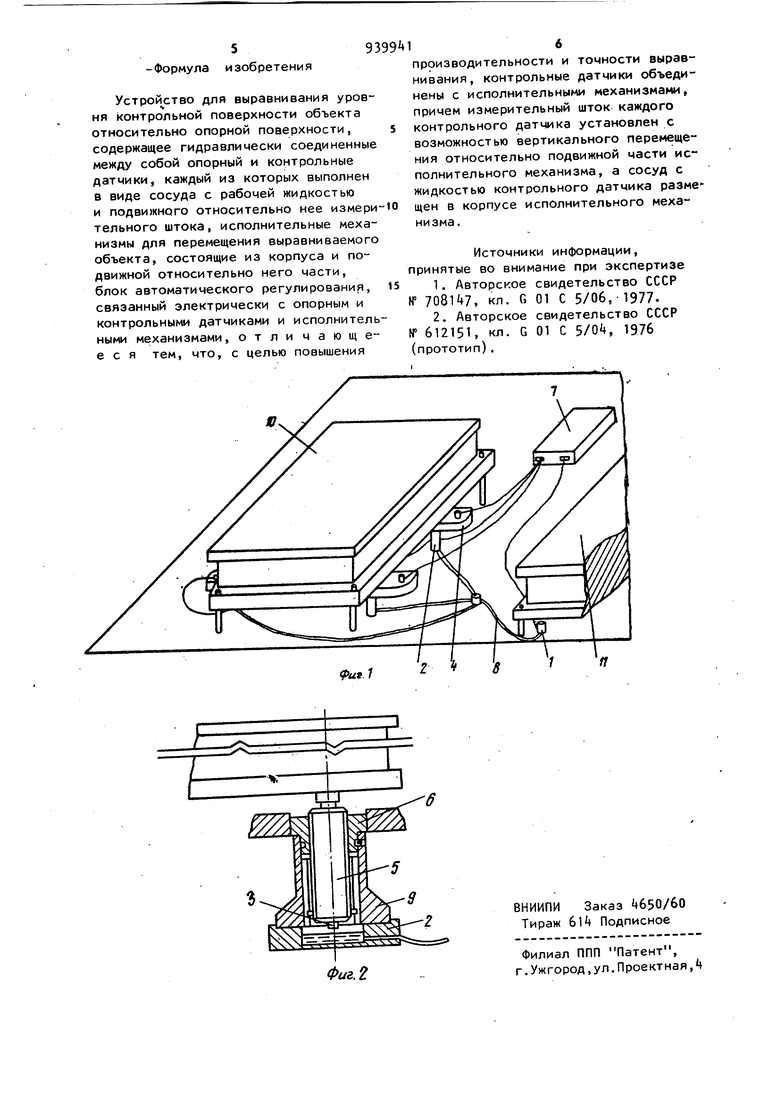
Наиболее близким по технической сущности к предлагаемому является устройство для выравнивания контроль 39 ной поверхности объекта относительно опорной, содержащее гидравлически соединенные между собой опорный и контрольные датчики, выполненные каж «дый в виде сосуда с рабочей жидкостью и измерительного штока, ПОДВИЖНОГ относительно рабочей жидкости, исполнительные механизмы, состоящие из корпуса и подвижной относительно нее части, для перемещения объекта и воз действующий на них блок автоматического регулирования, связанный с опор 1ным и контрольными датчиками С2. Однако устройство имеет недостаIочную производительность процесса выравнивания из-за раздельного ра положения контрольных 1атчиков и соответствующих им исполнительных механизмов и пониженную точность монтажа объекта, изготовленного с базированием на основание. Цель изобретения - повышение производительности и точности процесса выравнивания. Поставленная цель достигается тем что устройство содержит гидравлически соединенные между собой опорный и контрольный датчики, каждый из которых выполнен в виде сосуда с рабочей жидкостью и подвижного относительно нее штока, исполнительные механизмы для перемещения выравниваемо го объекта, состоящие из корпуса и подвижной относительно него части, блок автоматического регулирования, связанный электрически с опорным и контрольными датчиками и исполнительными механизмами, причем измерительный поток каждого контрольного датчика закреплен на подвижной части исполнительного механизма с возможностью вертикального перемещения относительно этой части со стороны противоположной расположению, объекта а сосуд с жидкостью этого датчика вмонтирован в корпус исполнительного механизма. На {)иг. 1 показано устройство, общий вид; на фиг. 2 - контрольный датчик,, совмещенный с исполнительным механизмом, разрез. Устройство содержит опорный 1 и контрольные датчики, выполненные каждый в виде сосуда 2 с рабочей жид костью и измерительного штока 3 исполнительные механизмы 4, состоящие, например, из винта 5 и гайки б, приводимой во вращение электродвигателем через редуктор (не показаны} И блок автоматического регулирования 7, электрически связанный с этими механизмами и датчиками. Сосуды 2 контрольных датчиков, гидравлически соединенные между собой и опорным датчиком 1 шлангами 8, вмонтированы в корпуса 9 исполнительных механизмов 4, а измерительные штоки 3 этих датчиков закреплены на осях винтов 5 с возможностью вертикального перемещения относительно них выравниваемого объекта ID и опорной поверхнрсти 11. Устройство работает следующим образом. На фундамент устанавливают исполнительные механизмы и соединяют вмонтированные в них сосуды 2 с опорным датчиком 1 шлангами 8, через которые подают рабочую жидкость. Затем регулируют длину измерительного штока 3каждого контрольного датчика относительно подвижной части исполнительного механизма k так, чтобы расстояние от конца измерительного штока 3 до поверхности подвижной части, на которую опирается выравни.ваемый объект 10, было равно зазору между опорной поверхностью выравниваемого объекта 11 и уровням жидкости в опорном датчике 1. Исполнительные механизмы и контрольные датчики подключают к блоку автоматического регулирования 7, после чего выравниваемый объект 10 своим основанием ( контрольной базовой поверхностью ) устанавливают на винты 5. Выверка производится автоматически после включения блока 7, который последовательно включает исполнительные механизмы i, каждый из которых поднимает или опускает соответствующую точку выравниваемого объекта 10. При этом одновременно осуществляется выравнивание уровня контрольной поверхности относительно опорной как по высоте, так и в горизонтальном направлении. Причем блок 7 включает и соответственно отключает исполнительные механизмы k только по одному разу, так как ось контрольного датчика совмещена е осью исполнительного механизма t. Устройст о позволяет повысить точность монта ка оборудования, изготовленного с базированием на основание и увеличить производительность процесса выверки более чем на 60%.
