( УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный преобразователь | 1983 |
|
SU1142846A1 |
| СПОСОБ ЗАЩИТЫ БОЕВОЙ МАШИНЫ ОТ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087832C1 |
| СПОСОБ ЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ОТ УПРАВЛЯЕМЫХ РАКЕТ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280836C1 |
| Функциональный преобразователь угла поворота вала в код | 1982 |
|
SU1080174A1 |
| Устройство для вычисления координат | 1989 |
|
SU1635178A1 |
| Датчик для измерения частоты скольжения асинхронного электродвигателя | 1985 |
|
SU1278715A1 |
| Устройство для преобразования координат @ точек | 1980 |
|
SU960854A1 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| Множительное устройство | 1980 |
|
SU926673A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2022 |
|
RU2821977C2 |
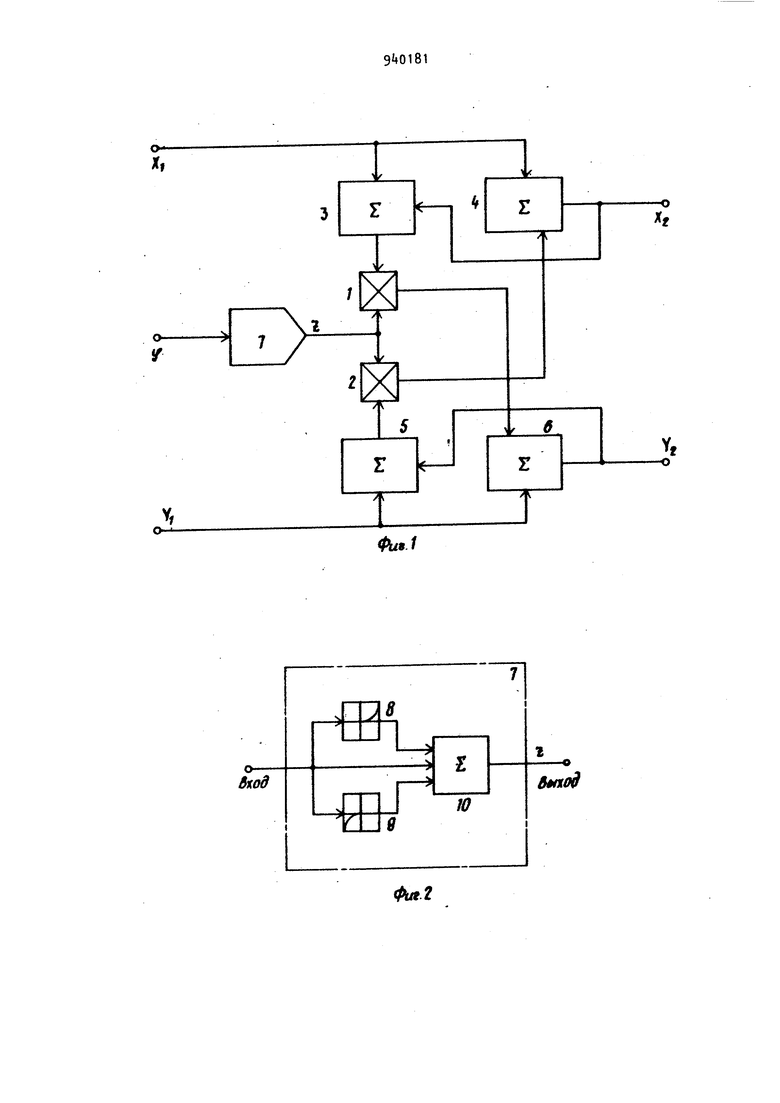
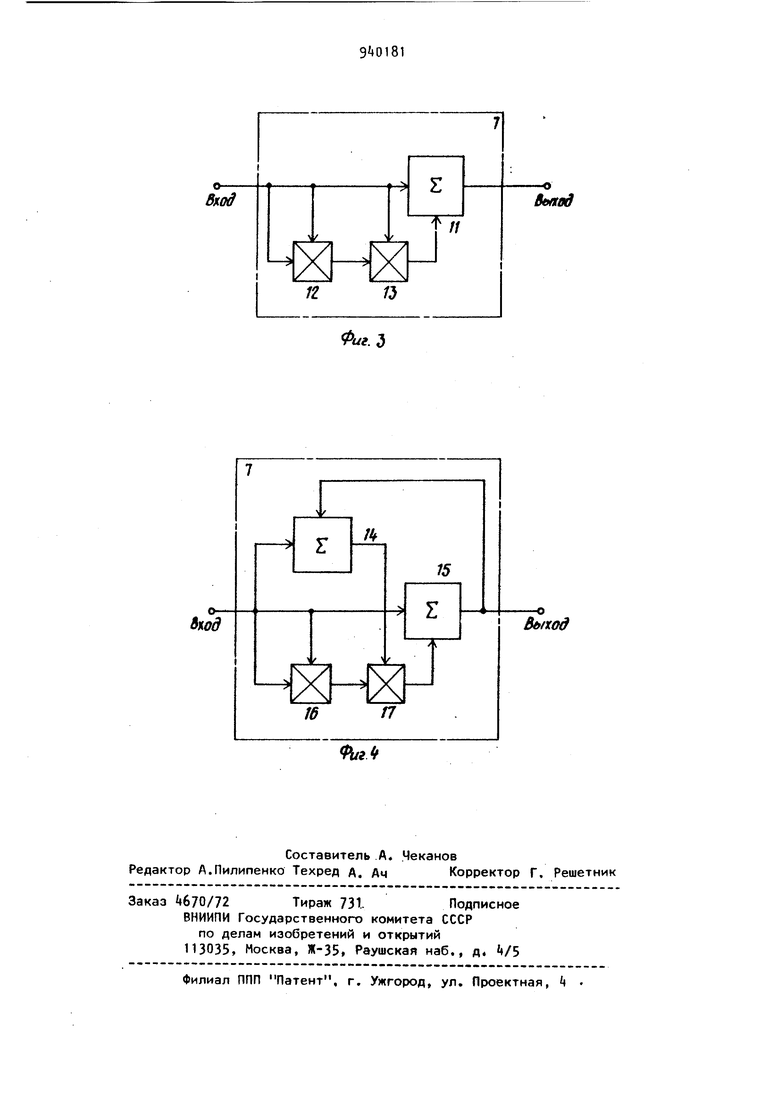
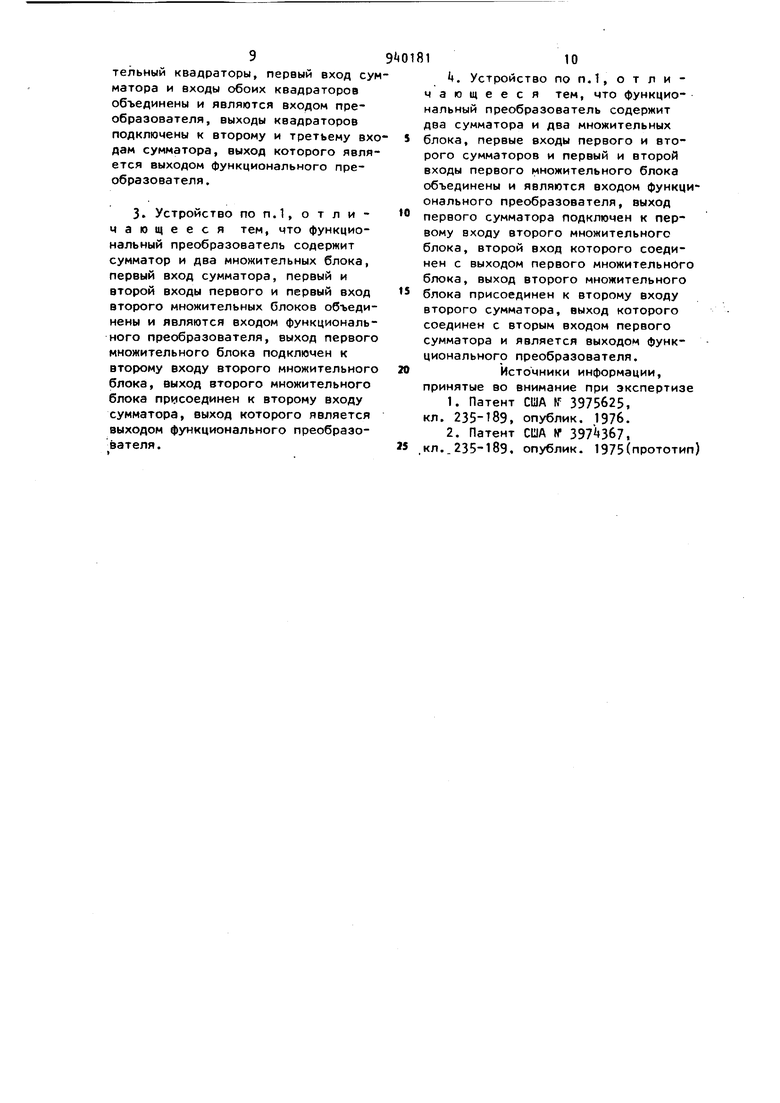
Изобретение относится к вычислительной технике и может быть использовано для выполнения операции преоб разования координат вектора при повороте осей координат. Известны устройства преобразования координат, выполняющие операцию преобразования координат вектора при повороте осей системы координат, (ротаторы) , содержащие синусный и косинусные функциональные преобразователи, четыре множительных блока и су маторы 1 . Недостатком данных устройств является их сложность. Наиболее близким к предлагаемому является устройство, содержащее два множительных блока и четыре сумматора, первые входы первого и второго сумматоров соединены с первым входом устройства, а первые входыТретьего и четвертого сумматоров - с вторым входом устройства, второй вход первого сумматора соединен с выходом второго сумматора и первым входом устройства, второй вход третьего сумматора - с выходом четвертого сумматора и вторым выходом устройства, выходы первого и третьего сумматоров соединены соответственно с первыми входами первого и второго множительных блоков, иторые входы которых объединены между собой и соединены с третьим входом устройства, а выходы п€.рвого и второго множительных блоков соединены, с вторыми входами соответственно четвертого и второго сумматоров 2. В известном устройстве входные сигналы - координаты вектора в исходной системе - подают одновременно на несколько входов схемы, реализующей операцию умножения вектора на матрицу. Элементы этой матрицы иэменяют, подавая угловую величину на входы множительных блоков. Таким образом, исходный вектор подвергается линейному преобразованию с коэффициентами, являющимися дробно-линей ными функциями угловой переменной, а теоретически эти коэффициенты линейного преобразования, как известно, должны быть равны по абсолютной величине синусу и косинусу угловой переменной. .Поэтому устройство принципиально не может реализовать точное преобразование координат вектора. Анализ показывает, что погрешность преобразования возрастает вмес те с расширением диапазона изменения угловой переменной, достигая величины порядка 1% при работе в пределах 90. Поэтому практически при построении такого устройства используют трехступенчатое преобразование вектора. Сначала производят дискретный поворот вектора на углы, кратные 90, затем на углы, кратные 11, 25, используя схемы умножения на матрицы, коэффициенты которых вводят при помощи управляемых делителей, после чего производят интерполяцию в пределах 1:11,25°, при помощи аналогового устройства преобразования координат, рассмотренного выше. Это приводит к усложнению устройства и увеличению погрешности примерно до 0,. Цель изобретения - упрощение устройства и повышение точности его работы. Поставленная цель достигается тем ЧТО устройство преобразования коорди нат, содержащее два множительных бло ка и четыре сумматора, первые входы первого и второго сумматоров соединены с первым входом устройства, а первые входы третьего и четвертого сумматоров - с вторым входом устройства, второй вход первого сумматора соединен с выходом второго сумматора и первым выходом устройства, второй вход третъего сумматора - с выходом четвертого сумматора, и вто рым выходом устройства, выходы первого и третьего сумматоров соединен соответственно) с первыми входами пе вого и второго множительных блоков, вторые входы которых объединены меж ду собой и соединены с третьим входом устройст ва, а выходы первого и второго множительных блоков соединены с вторыми входами соответствен но четвертого и второго сумматоров, дополнительно содержит функциональный преобразователь, включенный меж третьим входом устройства и вторыми входами множительных блоков. Функциональный преобразователь содержит сумматор, положительный и отрицательный квадраторы, первый вход сумматора и входы обоих квадраторов объединены и служат входом функционального преобразователя, выходы квадраторов подключены к второму и третьему входам сумматоров, выход которого является выходом функционального преобразователя. Функциональный преобразователь содержит сумматор и два множительных блока, первый вход сумматора, оба входа первого и первый вход второго множительных блоков объединены и служат входом функционального преобразователя, выход первого множительного блокг подключен .к второму входу второго множительного блока выход второго множительного блока присоединены к второму входу сумматора, выход которого служит выходом функцио нального преобразователя. Функциональный преобразователь содержит два сумматора и два множительных блока, первые входы первого и второго сумматоров и объединенные входы первого множительного блока соединены между собой и служат входом функционального преобразователя, выход первого сумматора подключен к первому входу второго множительного блока, второй вход которого соединен с выходом первого множительного блока, выход второго множительного блока присоединен к второму входу второго сумматора, выход которого соединен с вторым входом первого сумматора и является выходом функциональ Hoio преобразователя. На фиг. 1 приведена функциональная схема устройства преобразования координат; на фиг.2, 3 и f - функциональные схемы вариантов выполнения функционального преобразователя. Устройство преобразования координат (фиг.1) содержит множительные блоки 1 и 2, сумматор ы 3-6 и функ-: циональный преобразователь 7. Последний может быть универсальным, специализированным, либо выполненным на основе двух квадраторов - положительного 8 и отрицательного 9 и сумматора 1-0 (фиг.2, согласно другим вариантам выполнении, функциональный преобразователь 7 содержит сумматор .11, множительные блоки 12 и 13(фиг.З) 5 либо сумматоры и 15 и множительные блоки 16 и 17 (Оиг.. Операция преобразования координа вектора при повороте осей координат в устройстве производится следующим образом(фиг. 1 . Сигнал Xf , соответствующий перв координате преобразуемого вектора, поступает на первый вход устройства и далее на первые входы первого 3 и второго k сумматоров, a сигнал Y , соответствующий второй координате преобразуемого вектора, на второй вход устройства и далее на первые входы третьего 5 и четвертого 6 сум маторов. Выходные сигналы Х и УЗ, являющиеся координатами преобразованного вектора, поступают на первый и второй выходы устройства с вы ходов второго k и четвертого 6 сумматоров соответственно, причем Y., подается также на второй вход первого сумматора 3i а Y - на второй вход третьего сумматора 5. Выходы первого сумматора 3 и третьего сумматора 5 соединены соответственно с первыми входами первого 1 и второ го 2 множительных блоков, вторые входы)которых объединены между собо и соединены с выходом функционального преобразователя 7, вход которого является третьим входом устройства, на который поступает сигнал, соответствующий угловой переменной j , Выход первого множительного блока 1 соединен с вторым входом четвертого сумматора 6, а выход второго множительного блока 2-е вторым входом второго сумматора , При соответствующем выборе величин и знаков коэффициентов суммирования, необходимом для правильной pa6oTbt устройства, при любых допустимых входных сигналах будут вы.полняться следующие соотношения Хз.- X5-i(Y, + Y)) (1) Xi-i(Y, -. Yj)) Y. ,.l(Xi + Xz)J .1.1g(Xi + Н - F((2) заданная функция преобразования угловой переменной f . Можно показать, что если функциональный преобразователь воспроизводит функцию вида f-arc iM преобразование (1) эквивалентно преобразованию i Xj, X|CosY Y Х , Y., причем методическая погрешность равна нулю. Функция (3J - гладкая, монотонная и может быть легко рассчитана в табличном виде. Устройство, выполненное по схеме фиг.1, может удовлетворительно работать при углах поворота осей системы координат вплоть до 120-150 , а его погрешность зависит только от погрешности используемых в нем аналоговых элементов. При необходимости работа в более широком диапазоне yi- лов может быть обеспечена либо переключением знака входных сигналов (что соответствует вычитанию углов, кратных±90 либо последовательным включением устройств. В обоих случаях достаточно иметь лишь один функциональный преобразователь. Если не требуется точность преобразования лучше, чем 1-2, устройство преобразования координат может быть упрощенр, с этой целью функциональный преобразователь выполняют по схеме фиг.2. При этом сигнал Y , соответствующий угловой переменной, поступает на первый вход сумматора 10 и входы положительного 8 и отрицательного 9 квадраторов. Выходные сигналы квадраторов поступают на второй и третий входы сумматора 10, выход которого является выходом функциональ,ного преобразователя, реализующего зависимость вида Z af - bf/f/. (5) Такое упрощенное устройство имеет погрешность порядка 1,5-2% при изменении угловой переменной в пределах t 120°. Количество типов элементов, используемых в устройстве, можно уменьшить до двух, выполнив функциональный преобразователь по схеме фиг.ЗВ этом случае сигнал Y , соответствующий угловой переменной, поступает на первый вход сумматора 11, оба входа первого 12 и первый вход второго 13 множительных блоков, выход первого множительного блока 12 присоединен к второму входу второго множительного блока 13, выход которого присоединен к второму входу сумматора 11. Выход последнего слу жит выходом функционального пп« об79рэзователя, реализуюи4его зависимость вида Z аТ t (б) Погрешность такого ротатора также составляет около 1, в диапазоне изменения угловой переменной ± 1 20°. Точность функционального преобразователя, а следовательно, и устройства преобразования координат мои но повысить, незначительно усложнив его, как показано на фиг.. Здесь сигнал f , соответствующий угловой переменной, поступает на первые вход первого 1 и второго 15 сумматоров и объединенные входы первого множительного блока 1б. Выходы первого множительного блока 16 и первого сум матора k соединены с входами второго множительного блока 17, выход которого соединен с вторым входом второго сумматора 15. Выходвторого сум матора 15, являющийся выходом функционального преобразователя, соедине также с вторым входом первого сумма тора , В этом случае на выходе функционального преобразователя получают зависимость вида аМ+bf Устройство с таким функциональным преобразователем может иметь погрешнесть 0,,5 в диапазоне изменения угловой переменной в пределах 1г 150° , Предлагаемое устройство проще устройтсва-прототипа, так как не содержит компараторов для определения моментов переключения при достижении угловой переменной значений углов, кратных 90 и 11,25,, а также набора делителей и ключей для управления этими делителями. Введение в устоойство функционального преобразователя позволяет устранить методическую пог решность при одновременном расширении диапазона допустимых изменений угловой переменной в 10-12 раз, Отсутствие переключательных элементов позволяет все вычисления производить в аналоговом виде, и тем самым, повысить быстродействие устройства при мерно на порядок. В тех случаях, когда томность устройства не является определяющим критерием, предлагаемое исполнение функционального пр образователя позволяет еще более упростить и удешевить его, уменьшить разнотипность его блоков и реализовать его полностью на типовых интегральных элементах. Упрощение структурн,; устройства преобразования координат позволяет реализовать, его в виде самостоятельного элемента в интегральном исполнении. Кроме того, его можно использовать в аналоговых и гибридных вычислительных у(;тройствах и системах как в качестве нового самостоятельног го блока, так и в виде простого и дешевого умножающего синусного и косинусного функциональных преобразователей. Таким образом, положительный эффект предлагаемого устройства заключается в упрощении его, уменьшении разнотипности его элементов, повышении быстродейст.вия, технологичности и расширении допустимого диапазона изменения угловой переменной при одновременном повышении точности за счет уменьшения /методической; погрешности устройства вплоть до полного ее устранения. Формула изобретения 1. Устройство для преобразования координат, содержащее два множительных блока и четыре сумматора, перзые входы первого и второго сумматоров соединены с первым входом устройства, а первые входы третьего и четвертого сумматоров - с вторым входом устройства, второй вход первого сумматора соединен с выходом второго сумматора и первым выходом устройства, второй вход третьего сумматора соединен с выходом четвертого сумматора и вторым выходом устройства, выходы первого и третьего сумматоров соединены соответственно с первыми входами первого и второго множительных блоков, вторые входы которых объединены и соединены с третьим входом устройства, а выходы первого и второго множительных блоков соединены с вторыми входами соответственно четвертого и второго сумматоров, отличающееся тем, что, с целью упрощения и повышения точности преобразования координат, оно дополнительно содержит функциональный преобразователь, вход которого соединен с третьим входом уст ройства, а выход - с вторыми входами множительных блоков. 2 Устройство по П.1, отличающееся тем, что функциональный преобразователь содержит сумматор, положительный и отрицательный квадраторы, первый вход сум матера и входы обоих квадраторов объединены и являются входом преобразователя, выходы квадраторов подключены к второму и третьему вхо дам сумматора, выход которого является выходом функционального преобразователя.
lOlSl10
первого сумматора подключен к первому входу второго множительного блока, второй вход которого соединен с выходом первого множительного блока, выход второго множительного
5 блока присоединен к второму входу второго сумматора, выход которого соединен с вторым входом первого сумматора и является выходом функционального преобразователя.
20Источники информации,
принятые во внимание при экспертизе
И кл.235-189, опублик. 1973(прототип)
п
Фиг.Ъ
