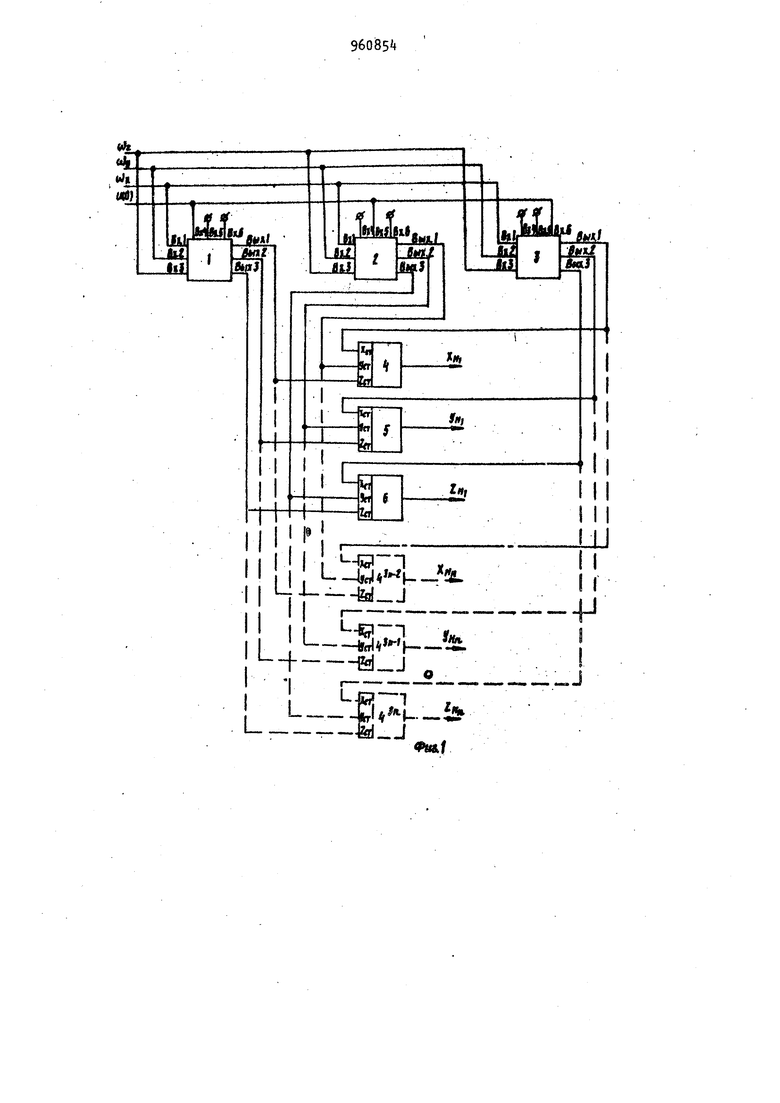
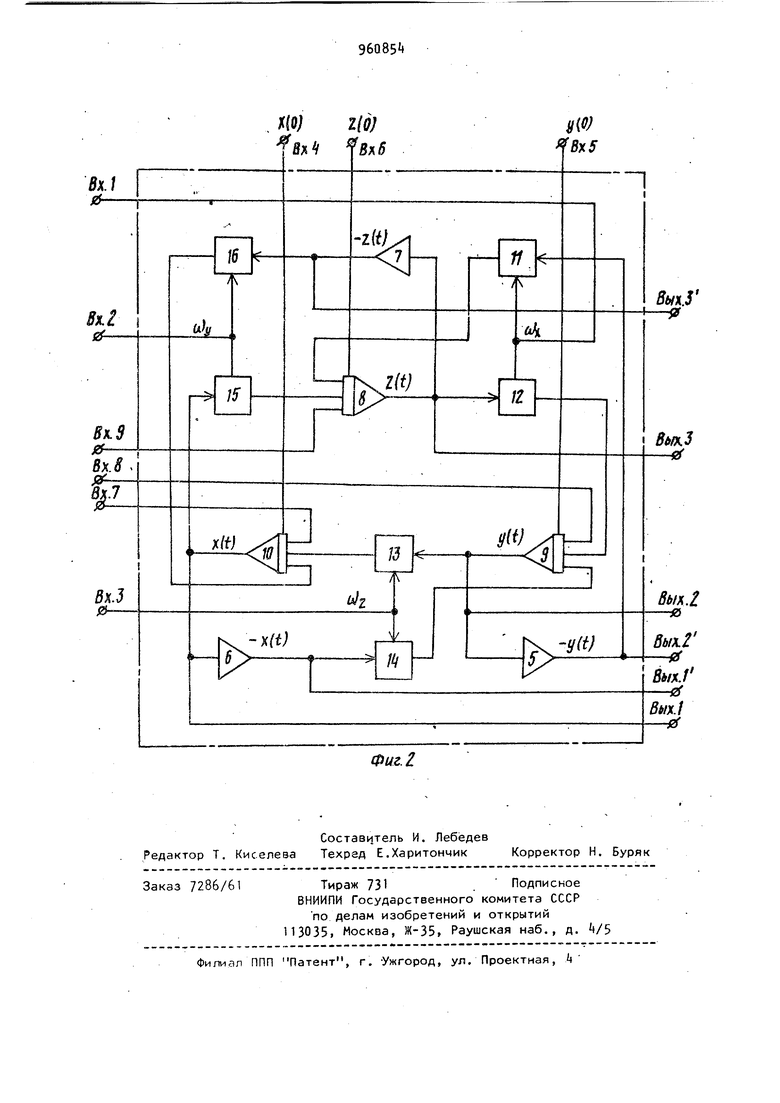
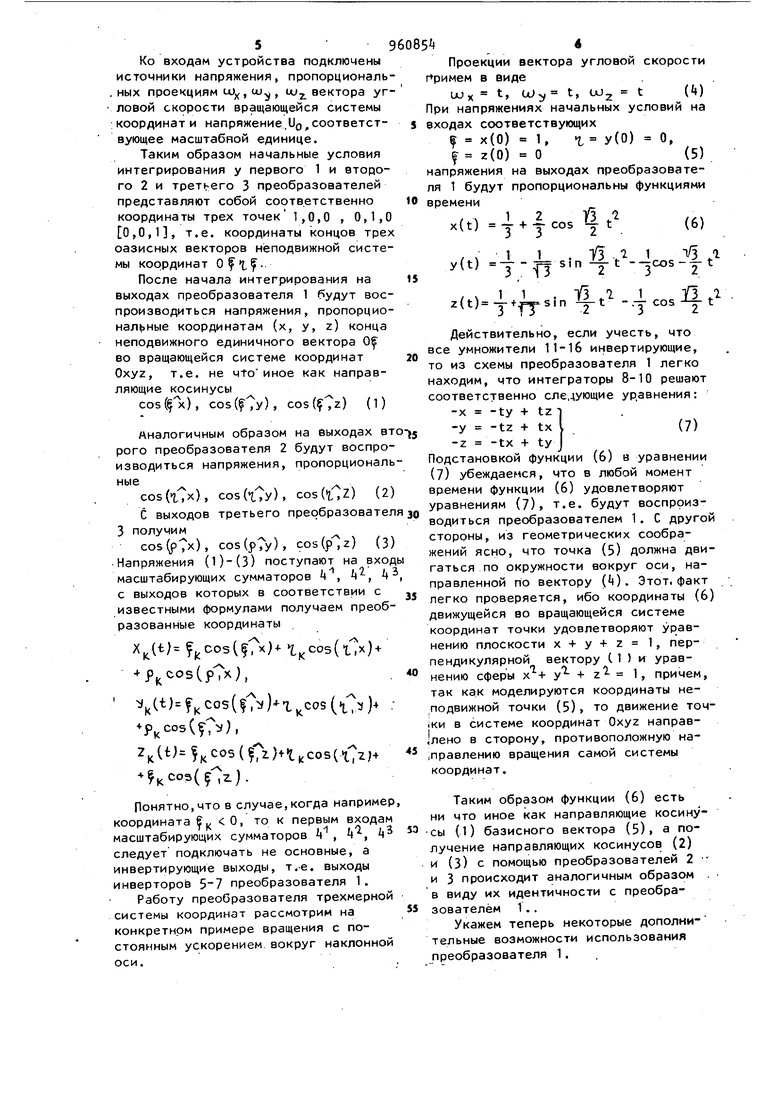
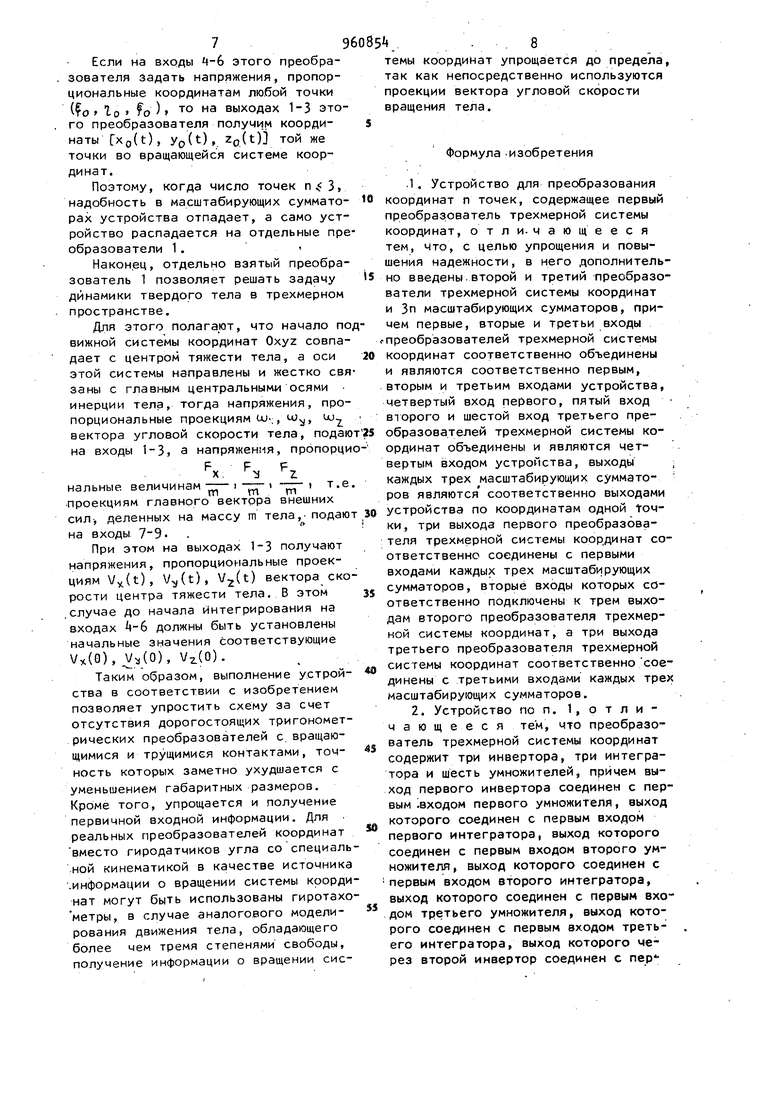
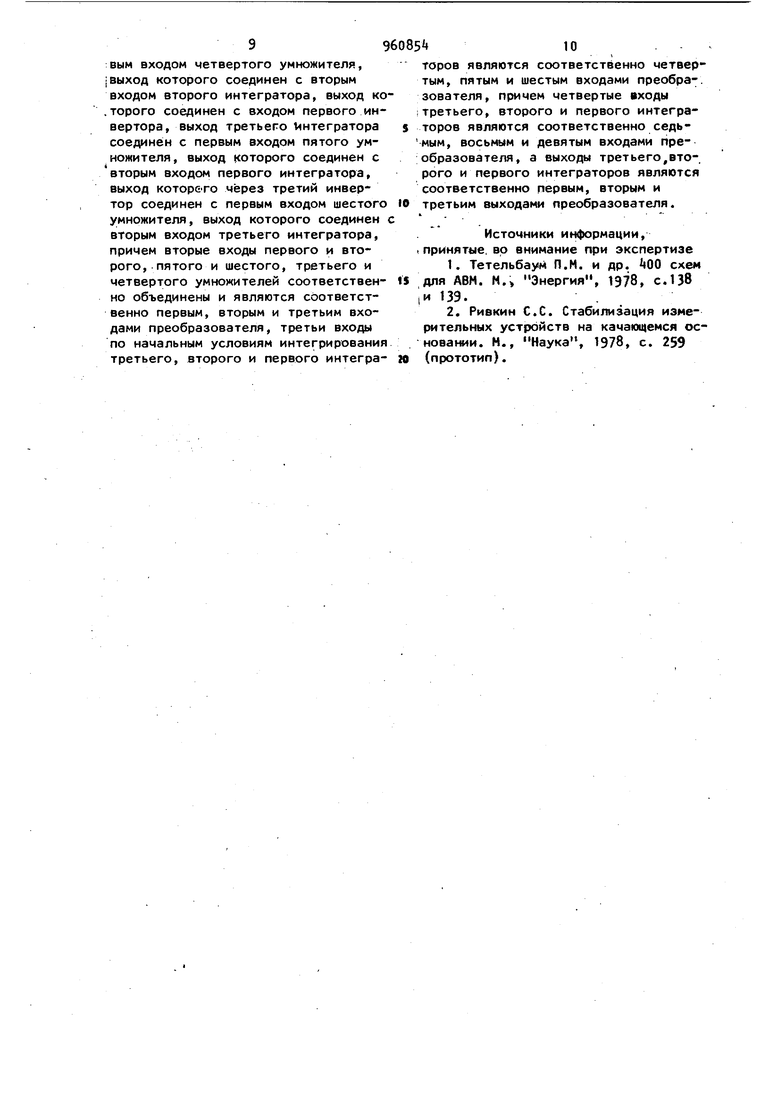
Изобретение относится к моделированию и может быть использовано в аналоговых вычислительных машинах, и, кроме того, в счетно-решающих приборах для преобразования координат. Известно устройство для преобразования координат, содержащее два умножителя, два интегратора и инвертор, включенные в кольцевую схему так, что выход первого умножителя соединен со входом первого интегратора, вы ход которого подключен ко входу второго умножителя, выход которого, в свою очередь, подключен ко входу второго интегратора, выход которого через инвертор подключен ко входу первого умножителя. Если вторые входы умножителей подключить к источнику напряжения, пропорционального скорости tf (t) поворота вращающейся системы координат Оху .(имеющей с неподвижной системой координат начало), а выходы интеграторов по начальным условиям соединить с источниками напряжения, пропорциональных начальным значениям координат точки , 1 f х(о, г у(о) то после начала интегрирования, на выходах интеграторов, будут воспроизводиться напряжения, пропорциональные текущим коррдинатам x(t) ) yi(0)cosf(t); y(t) (0)4.y(0)sini(t) точки во вращающейся системе координат 1 . Однако это устройство решает только двумерную задачу - преобразование координат точек плоскости. Наиболее близким по технической сущности является преобразователь координат в трехмерном пространстве, выходными величинами которого являются угловые координаты f и Q 39точки во вращающейся системе координат Oxyz, а входными величинами координаты Ч и q точки 8 неподвижной системе координат О tf С2, Недостатком известного устройства является сложность изготовления и сравнительно невысокая надежность преобразователя, а также то, что для выполнения операции преобразования координат п точек необходимы ана логичных преобразователей. Цель изобретения - упрощение и по вышение надежности устройства преобразования трехмерных координат п точек. Для достижения цели в устройство для преобразования координат п точек, содержащее первый преобразователь трехмерной системы координат, дополнительно введены второй и третий преобразователи трехмерной систе мы координат и Зп масштабирующих сум маторов, причем первые, вторые и третьи входы преобразователей трехмерной системы координат соответственно объединены и являются соответственно первым, вторым и третьим входами устройства, четвертый вход первого, пятый вход второгои шестой вход третьего преобразователя трехмерной системы координат д)бъединены и являются четвертым входом уст ройства, выходы каждых трех масштаби рующих сумматоров являются соответственно выходами устройства по координатам одной точки, три выхода первого преобразователя трехмерной сис.темы координат соответственно соединены с первыми входами каждых трех масштабирующих сумматоров, вторые входы которых соответственно подключены к трем выходам второго преобразователя трехмерной системы коорди™ нат, а три выхода третьего преобразователя трехмерной системы координат соответственно соединены с треть ими входами каждых Трех масштабирующих сумматоров, а преобразователь трехмерной системы координат содержит три инвертора, три интегратора и шесть умножителей, причем выход первого инвертора соединен с первым входом первого умножителя, выход которого соединен с первым входом первого интегратора, выход которого сое динен с первым входом второго умножителя, выход которого соединен с первым входомвторого интегратора, выход которого соединен с первым вхо дом третьего умножителя, выход которого соединен с первым входом третьего интегратора, выход которого через второй инвертор соединен с первым входом четвертого умножителя, выход которого соединен со вторым входом второго интегратора, выход которого соединен со входом первого инвертора, выходтретьего интегратора соединен с первым входом пятого умножителя, ВЫХОД которого соединен со вторым входом первого интегратора, выход которого через третий инвертор соединен с первым входом шестого умножителя, выход которого соединен со вторым входом третьего интегратора, причем вторые входы первого и второго , пятого и шестого, третьего и четвертого умножителей соответственно объединены и являются соответственно первым, вторым и третьим входами преобразователя, третьи входы по начальным условиям интегрирования третьего, второго и первого интеграторов являются соответственно четвертым, пятым и шестым входами преобразователя, причем четвертые входы третьего, второго и первого интеграторов являются соответственно седьмым, восьмым и девятым входами преобразователя, а выходы третьего, второго и первого интеграторов являются собственно первым, вторым и третьим выходами преобразователя , , На фиг. 1 изображена блок-схема устройства; на фиг. 2 - то же, преобразователь трехмерной системы координат. Устройство содержит первый 1, второй 2 и третий 3 преобразователи трехмерной системы координат и масштабирующие сумматоры 4 -(4, а преобразователь системы координат содержит первый 5, второй 6 и третий 7 инверторы, первый 8, второй 9 и третий 10 интеграторы и шесть умножителей П - 16. Работает устройство следующим образом. Устройство содержит три идентичных преобразователя координат одной точки 1-3 и Зп масштабирующих сумматора 4, входные проводимости по первым, вторым и третьим входам у каждых трех из этих сумматоров одинаковы и равны соответственно г, кЛО . .г (0) (к 1,2...п) 5 Ко входам устройства подключены источники напряжения, пропорциональ . ных проекциям ш, си,, ии вектора уг ловой скорости вращающейся системы координат и напряжение.Ug, соответствующее масштабной единице. Таким образом начальные условия интегрирования у первого 1 и второго 2 и третьего 3 преобразователей представляют собой соответственно координаты трех точек 1,0,0 , 0,1,0 0,0,1, т.е. координаты концов трех оазисных векторов неподвижной системы координат ,fПосле начала интегрирования на выходах преобразователя 1 будут воспроизводиться напряжения, пропорционал ные координатам (х, у, z) конца неподвижного единичного вектора 0 во вращающейся системе координат Oxyz, т.е. не чтоиное как направляющие косинусы cos(k), cos(f7y), cos(f7z) (1) Аналогичным образом на выходах BT рого преобразователя 2 будут воспроизводиться напряжения, пропорциональ ные cos(l7x), cosC-by). cos (,2) (2) С выходов третьего преобразовател 3 получим cos(p7x). cos(p7y). cos() (3) Напряжения (1)-(3) поступают на вход масштабирующих сумматоров k, k, 4 с выходов которых в соответствии с известными формулами получаем преобразованные координаты к ()tKCos(tTx) + ЯцС05(р7х), Ct)f,cos(f7:)(Ob РкС05(7у), 2jt)(f)4,cos(t7zM )Понятно,ЧТО в случае,когда например, координата |ц 0, то к первым входам масштабирующих сумматоров k , k, k следует подключать не основные, а инвертирующие выходы, т.-е. выходы инверторов 5-7 преобразователя 1. Работу преобразователя трехмерной системы координат рассмотрим на конкретном примере вращения с постоянным ускорением.вокруг наклонной оси. Проекции вектора угловой скорости г+римем в виде t, oj, t UJ X t При напряжениях начальных условий на входах соответствующих f х(0) 1, ч у(0) О, f z(0) О(5) напряжения на выходах преобразователя 1 будут пропорциональны функциями времени 1 2 Уз Л -у J cos - t Tff т -i«s-yt . Уз 1 1 Уз 1 z(t)-l-. in -Ц-t -.4 COS -Ч- t Действительно, если учесть, что все умножители 11-16 инвертирующие, то из схемы преобразователя 1 легко находим, что интеграторы 8-10 решают соответственно сле.дующие уравнения: -X -ty + tz 1 -у -tz + tx I(7) -z -tx + ty J Подстановкой функции (6) в уравнении (7) убеждаемся, что в любой момент времени функции (6) удовлетворяют уравнениям (7), т.е. будут воспроизводиться преобразователем 1. С другой стороны, из геометрических соображений ясно, что точка (5) должна двигаться по окружности вокруг оси, направленной по вектору С). Этот, факт легко проверяется, ибо координаты (6) движущейся во вращающейся системе координат точки удовлетворяют уравнению плоскости X + у + z 1, перпендикулярной вектору С 1 ) и уравнению сферы X + у + z 1, причем, так ка.к моделируются координаты неподвижной точки (5), то движение точКи в системе координат Oxyz направлено в сторону, противоположную направлению вращения самой системы координат. Таким образом функции (6) есть ни что иное как направляющие косинусы (1) базисного вектора (5), а получение направляющих косинусов (2) и (З) с помощью преобразователей 2 и 3 происходит аналогичным образом в виду их идентичности с преобразователем 1.. Укажем теперь некоторые дополнительные возможности использования преобразователя 1. . Если на входы 4-6 этого преобразователя задать напряжения, пропорциональные координатам любой точки (о То fo Ь то на выходах 1-3 этого преобразователя получим координаты fxgit), y(j(t) , 2o(t) той же точки во вращающейся системе координат. Поэтому, когда число точек , надобность в масштабирующих сумматорах устройства отпадает, а само устройство распадается на отдельные пре образователи 1 . Наконец, отдельно взятый преобразователь 1 позволяет решать задачу динамики твердого тела в трехмерном пространстве. Для этого полагают, что начало по вижной системы координат Oxyz совпадает с центром тяжести тела, а оси этой системы направлены и жестко свя заны с главным центральными осями инерции тела, тогда напряжения, пропорциональные проекциям Си-;, w, uj вектора угловой скорости тела, подаю на входы 1-3j а напряжения, пропорци нальные величинам tn m проекциям главного вектора внешних сил деленных на массу m тела,-подаю на входы . При этом на выходах 1-3 получают напряжения, пропорциональные проекциям Vy(t), Vy(t), V2(t) вектора ско рости центра тяжести тела. В этом .случае до начала интегрирования на входах -6 должны быть установлены начальные значения соответствующие Vx(0),), V(0). Таким образом, выполнение устройства в соответствии с изобретением позволяет упростить схему за счет отсутствия дорогостоящих тригонометрических преобразователей с. вращающимися и трущимися контактами, точность которых заметно ухудшается с уменьшением габаритных размеров. Кроме того, упрощается и получение первичной входной информации. Для реальных преобразователей координат вместо гиродатчиков угла со специаль .ной кинематикой в качестве источника .информации о вращении системы коорди нат могут быть использованы гиротахо метры, в случае аналогового моделирования движения тела, обладающего более чем тремя степенями свободы, получение информации о вращении CMCтемы координат упрощается до предела, так как непосредственно используются проекции вектора угловой скорости вращения тела. Формула .изобретения .1. Устройство для преобразования координат п точек, содержащее первый преобраз.ователь трехмерной системы координат, отл и. чающееся тем. Что, с целью упрощения и повышения надежности, в него дополнительно введены второй и третий преобразователи трехмерной системы координат и Зп масштабирующих сумматоров, причем первые, вторые и третьи входы преобразователей трехмерной системы координат соответственно объединены и являются соответственно первым, вторым и третьим входами устройства, четвертый вход первого, пятый вход второго и шестой вход третьего преобразователей трехмерной системы координат объединены и являются четвертым входом устройства, выходы каждых трех масштабирующих сумматоров являются соответственно выходами устройства по координатам одной Точки, три выхода первого преобразователя трехмерной системы координат соответственно соединены с первыми входами каждых трех масштабирующих сумматоров, вторые входы которых соответственно подключены к трем выходам второго преобразователя трехмерной системы координат, а три выхода третьего преобразователя трехмерной системы координат соответственносоединены с третьими входами каждых трех масштабирующих сумматоров. 2. Устройство по п. 1, о т л и чающееся тем, что преобразователь трехмерной системы координат содержит три инвертора, три интегратора и шесть умножителей, причем выход первого инвертора соединен с первым входом первого умножителя, выход которого соединен с первым входом первого интегратора, выход которого соединен с первым входом второго умножителя, выход которого соединен с первым входом второго интегратора, выход которого соединен с первым входом третьего умножителя, выход которого соединен с первым входом третьего интегратора, выход которого через второй инвертор соединен е входом четвертого умножителя, iвыход которого соединен с вторым входом второго интегратора, выход ко .торого соединен с входом первого инвертора, выход третьего ViHTerpaTOpa соедине Н с первым входом пятого умножителя, выход которого соединен с вторым входом первого интегратора, выход котор&го через третий инвертор соединен с первым входом шестого умножителя, выход которого соединен вторым входом третьего интегратора, причем вторые входы первого и второго, пятого и шестого, третьего и четвертого умножителей соответственно объединены и являются соответственно первым, вторым и третьим входами преобразователя, третьи входы по начальным условиям интегрирования третьего, второго и первого иитеграАО , торов являются соответственно четвертым, пятым и шестым входами преобразователя, причем четвертые входы третьего, второго и первого интеграторов являются соответственно седьмым, восьмым и девятым входами преобразователя, а выходы третьего,вто-. рого и первого интеграторов являются соответственно первым, вторым и третьим выходами преобразователя. Источники информации, принятие, во внимание при экспертизе 1.Тетельбаум П.М. и др. 00 схем для АВМ. М. Энергия, 1978, с.138 и 139. 2.Ривкин С.С. Стабилизация измерительных устройств на качаю1цемся основании. М., Наука, 1978, с. 259 (прототип).
- I
ji I L jS4«l-:a
II -----.
II I I L45P I I 1 I IJJi lH L
-+
.-i
,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления моментом синхронного двигателя | 1988 |
|
SU1527700A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство для моделирования удара тела о неподвижную преграду | 1985 |
|
SU1381341A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| Устройство для моделирования случайных блужданий | 1981 |
|
SU999063A1 |
| Устройство для определения электромагнитного момента асинхронного двигателя | 1982 |
|
SU1053254A1 |
| Система стабилизации бурового судна | 1986 |
|
SU1360405A1 |
| Устройство для определения параметров главного потокосцепления машины переменного тока | 1985 |
|
SU1319219A1 |