(5) СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ



| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования с компенсацией помех | 1980 |
|
SU941922A1 |
| Система автоматического регулирования | 1974 |
|
SU467322A1 |
| Устройство синхронизации опорного колебания высокоскоростного модема | 1991 |
|
SU1800634A1 |
| Анализатор устойчивости динамических систем с обратной связью | 1986 |
|
SU1354137A1 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| КОМПЕНСАТОР ШУМОВОЙ ПОМЕХИ | 1998 |
|
RU2137297C1 |
| Устройство для определения частотных характеристик систем автоматического регулирования | 1971 |
|
SU443366A1 |
| Анализатор устойчивости динамических систем с обратной связью | 1987 |
|
SU1432423A2 |
| УСТРОЙСТВО И СПОСОБ КОМПЕНСАЦИИ УЗКОПОЛОСНЫХ ПОМЕХ В ЦИФРОВЫХ РАДИОСИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2013 |
|
RU2552850C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 2008 |
|
RU2369963C1 |
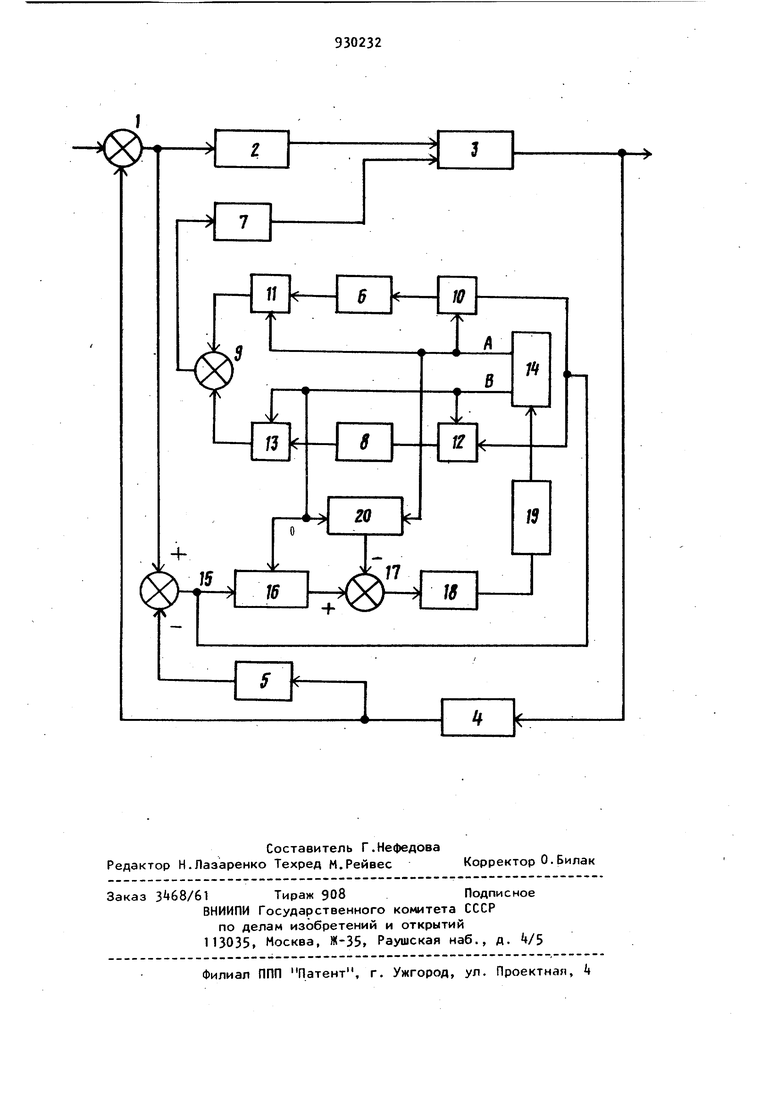
Изобретение относится к классу высокоточных быстродействующих следящих, систем и может быть применено для управления объектами, для которых требуется максимально уменьшить влияние периодических помех переменной частоты на регулирующую величину. Известна следящая система, состоя щая из вычислительного устр.ойств.а, отрабатывающего элемента, усилителя, исполнительного двигателя, в которой для компенсации периодических помех с частотой питающего напряжения используется отрицательная обратная связь по помехе, содержащая в качест ве основных элементов синхронный детектор и модулятор 1 . Недостатком этой системы является то, что в ней подавляется только ква ратурная помеха постоянной частоты, равной частоте питающего напряжения. По основному авт.св. № 467322 известна система автоматичесокго управления, содержащая последователоно соединенные измеритель рассогласования, корректирующий элемент, исполнительный механизм и датчик обратной связи, выход которого соединён с одним из входов измерителя paccoi- ласования и входом первого линейного фильтра, выход которого через последовательно соединенные первый блок умножения, второй линейный фильтр и второй блок умножения подключен к первому входу сумматора, а через последовательно соединенные третий блок умножения, третий линейный фильтр и четвертый блок умножения - к второму входу .сумматора, выход которого через четвертый линейный фильтр соединен с вторым входом исполнительного механизма, вторые входы блоков умножения подключены к соответствующим выходам первого источника гармонических сигналов ,21 f 39 Однако эта система не обеспечивает подавления периодической помехи на выходе системы в случае переменности частоты помехи, препятствует прохождению полезного сигнала на частоте помехи и формирует дополнительную помеху на этой же частоте, мощность которой пропорциональна мощности полезного сигнала в полосе частот пропускания компенсирующего фильтра, это снижает эффективность подавления периодических помех постоянной частоты на выходе системы. Цель изобретения - повышение помехрзащищенности системы. Поставленная цель достигается тем что в системе установлены второй источник гармонического сигнала и посл довательно соединенные второй сумматор, фазовый детектор, третий сумматор, пятый линейный фильтр и интегра тор, выход которого соединен с входом первого источника гармонических сигналов, косинусный выход которого соединен с вторым входом фазового де тектора и первым входом второго исто ника гармонических сигналов, а синусный выход - с вторым входом второго источника гармонических @сигналов, выход которого соединен с вторым входом третьего сумматора, выход первого линейного фильтра соединен с первыми входами первого и третьего блоков умножения через второй сумматор, второй вход которого подключен к выходу измерителя рассоглас вания. Введение второго сумматора позволяет исключить влияние полезной низк частотной составляющей на качество подавления сигнала периодической помехи, а введение фазового детектора, второго источника гармонических сигналов, третьего сумматора, пятого линейного фильтра и интегратора позв ляет осуществлять настройку первого источника гармонических сигналов на частоту периодической помехи и тем самым повысить эффективность подавле ния периодических помех на выходе системы как переменной, так и постоянной частоты. При этом наличие вто рого источника гармонических сигналов и третьего сумматора обеспечивает подавление второй гармоники помехи, образующейся при фазовом детектировании. 2 На чертеже приведена блок-схема системы. Система включает измеритель 1 рассогласования, корректирующий элемент 2, исполнительный механизм 3 в виде исполнительного элемента, датчик обратной связи 4, первый 5, второй 6, третий 7 и четвертый 8 линейные фильтры, первый сумматор 9 первый 10, второй 11, третий 12 и четвертый 13 блоки умножения, первый источник k гармонических сигналов, второй сумматор 15 фазовый детектор 16, третий сумматор 17, пятый линейный фильтр 18, интегратор 19, второй источник 20 гармонических сигналов, синусный А и косинусный В выходы источника 14. Система работает следующим образом . При действии в системе периодической помехи переменной частоты на суммирующий вход исполнительного элемента 3 поступает сигнал с выхода корректирующего элемента 2, представляющий собой сумму полезной низкочастотной составляющей и периодической помехи ,(p)--Wa(p)tXBx(p)-VBb.)v,U), где Wjip) - передаточная функция корректирующего элемента; коэффициент передачи датчика обратной связи, изображение по Лапласу сигнала периодической помехи . А на вычитающий вход исполнительного элемента 3 подается сигнал с выхода линейного фильтра 7, представляющий собой оценку сигнала периодической помехи Х7Ср)х/,ср)Ху,(р), где ) изображение по Лампласу сигнала оценки периодической помехи. В результате вычитания этих сигналов подавляется сигнал периодической помехи на выходе системы, т.е. выходной сигнал (р) зависит только от задающего воздействия Хв,(р)-Х4Хе,ь,х(Р)3 Xeblxtp)W5(p)tX,i(p)-y.,(p) а(р)Х/а(р)СХвх(р)1чХвых О где W(p)- передаточная функция исполнительного элемента 3Сигнал оценки периодической поме и х(р; формируется следующим образом , На суммирующий вход сумматора 15 поступает сумма полезной низкочастотной составляющей и периодичес кой помехи 1:Увх() 4ХбЫх () которой вычитается сигнал, поступаю щий на вычитающий вход сумматора 15 с выхода линейного фильтра 6, представляющий собой выходной сигнал системы, пересчитанный на вход корректирующего элемента 2. С целью этого пересчета передаточная функция линейного фильтрЬ 6 выбирается равной , , ч., , aCpMiCp .(4 где (р)- (р)-передаточная функция, которая выбирается равной, в случае пренебрежительно малой инер ционности, испрлнительного элемента, ,(р)-.-. где 1(j - статический коэффициент передачи исполнительного элемента, а в случае инерционного исполнитель ного элемента ) В результате на выход сумматора проходит только сигнал периодической помехи 5.)-k4Xвyx СР)+ХИ (р). бФ).хФ)Ху,.|) . разложение ё ряд Фурье которого представим в виде .)-AyiSiwфу,-К5 (Фи), где AVJ - амплитуда основной гармоники периодической помехи ту1 - текущая фаза основной гар МОНИКИ периодической поме хи; остаточный член разложени в ряд Фурье, учитывающий высшие гармоники периодической помехи. Далее сигнал помехи поступает на первые входы фаз(эвот;о детектора 16 и блоков 10 и 12 умножения. На втор вход фазового детектора 16 поступаетгармонический сигнал с косинусного выхода В источника I гармонических сигналов Г-А.,со5ф, 14 14 где амплитуда и текущая фаза гармонического сигнала, соответственно. При наличии расстройки по частоте между сигналом периодической помехе Xvi и опорным гармоническим сигналом Х(4 выходной сигнал фазового детектора 16 может быть представлен в виде Х,--||, А .С(1Ч,-Ф,4Н V 51И(.,4)1- )Л 4СС«Ф-,4 I где б коэффици ент передачи фазового детектора, В сумматоре 17 из этого сигнала вычитается сигнал источника 20 гармонических сигналов двойной частоты помехи.. ао 20 где а.мплитуда и текущая фаза гармонического си1- нала двойной частоты помехи соответственно. При AjQ-i Ii AhVM-- и при Ф2о 20-14 ча вход линейного фильтра 18 поступает сигнал ,-Ф-,4) ,,.-.f., - L . 0(Фи)А-,4С09Ф 4, который проходя через линейный фильтр I8i сглаживается и поступает на вход интегратора 19. В результате на управляющий вход источника 14 гармонических сигналов поступает си1- нал, пропорциональный разности фаз между сигналом периодической помехи Ху и опорным гармоническим си1- налом, 14- . По этому сигналу источник 1 гармонических сигналов перестраивается на частоту помехи. С синусного А и косинусного В выходов источника k, настроенного на частоту помехи, подаются сигналы на вторые ВХОДЫблоков 10 и 12 умножения. Выделенные в результате синхронного детектирования, производимого . блоками 10 и 12 умножения, и последующего сглаживания линейными фильтрами 6 и 18 огибающие квадратурных составляющих периодической помехи подвергаются модуляции в блоках 11 и 13 умножения с частотой помехи. После этого на выходе сумматора 9 имеется отфильтрованный сигнал помехи , который посредством линейного фильтра 7 преобразуется таким образом, чтобы полученная на его выходе оценка сигнала помехи Х7 , поступив на вычитающий вход исполни тельного элемента 3, скомпенсировала действующую в системе периодическую помеху. С этой целью передаточная функция фильтра 7 выбирается равной Ч-,(р) Следует отметит., что ) и Wj(p можно реализовать в диапазоне частот ПОЛОСЫ и пропускания системы. При действии в системе периодической помехи переменной частоты наличие расстройки по частоте между сигналом помехи и выходным сигналом источника Т гармонических сигналов, равной 5 Гц приводит к тому, что компенсирующий фильтр подавляет периодическую помеху на выходе систе мы всего в раз. И в результате компенсации полезной составляющей в сумматоре 15 на вход компенсирующего фильтра и контура фазовой синхронизации поступает ослабленной на 20-30 сигнал периодической помехи. 3 предлагаемом устройстве по мере настройки источника 1 гармонических сигналов на частоту помехи уменьшается ослабление периодической помехи в сумматоре 15 и увеличивается коэффициент подавления периодической помех на выходе системы, и при настройке источника гармонических сигналов на частоту помехи он достигает 50. Это значение коэффициента подавления поддерживается неизменным в предлагаемом устройстве во всем диапазоне рабочих частот системы, в то время как известная система обеспечивает такое подавление только на фиксированной частоте. 28 Преимущество изобретения перед известной системой который подавляет периодические помехи, действующие на систему на фиксированной частоте или в очень узком диапазоне частот (десятые долигерца, заключается в том, что она обеспечивает подавление периодических помех в широком диапазоне частот (десятки килогерц), при этом применение источника гармонических сигналов двойной частоты помехи позволяет снизить нижнюю частоту полосы подавления до десятых долей герца. Формула изобретения Система автоматического регулирования по авт.св. № 67322, о т л иг чающаяся тем, что, с целью повышения помехозащищенности системы, в ней установлены второй источник гармонического сигнала и последовательно соединенные в-торрй сумматор, фазовый детектор, третий сумматор, пятый линейный фильтр и интегратор, выход которого соединен с входом первого источника гармонических сигналов, косинусный выход которого соединен с вторым входом фазового детектора и первым входом второго источника гармонических сигналов, а косинусный выход - с вторым входом второго источника гармонических сигналов, выход которого соединен с вторым входом третьего сумматора, выход первого линейного фильтра соединен с первыми входами первого и третьего блоков умножения через второй сумматор, второй вход которого подключен к выходу измерителя рассогласования. Источники информации, принятые во внимание при экспертизе 1.Азов А.К. и др. Усилители следящих систем переменного тока, Л., Энергия, 1972, с. 6. 2.Авторское свидетельство СССР W k67322, кл. G 05 В П/01, 19.02.7 (прототип).
