I
Предлагаемая система автоматического регулирования (САР) с подавлением периодических помех относится к классу высокоточных быстродействующих следящих систем и может быть применена для управления объектами, для которых требуется максимально уменьшить влияние периодических номех нромыщленной частоты на регулируемую величину.
Для фильтрации периодических помех в известных САР, содержащих последовательно соединенные измеритель рассогласования, корректирующий и исполнительный элементы и датчик обратной связи, выход которого соединен со входом измерителя рассогласования, используют первый линейный фильтр, выход которого через последовательно включенные первый блок умножения, второй линейный фильтр и второй блок умножения соединен с первым входом сумматора, а синусный выход источника гармонических сигналов связан со вторыми входами блоков умножения.
Однако при этом САР, в которой вход первого линейного фильтра соединен с выходом корректирующего элемента, вход которого связан с выходом сумматора, а второй вход сумматора подключен к выходу измерителя рассогласования, имеет те недостатки, что, во-первых, не обеспечивается эффективное по2
давление помехи на выходе системы, если она приложена в прямой цепи контура САР после точки включения первого линейного фильтра, и, во-вторых, инерционность линей.ных фильтров оказывает при этом влияние на динамику САР, особенно при близости частоты помехи и частоты среза системы.
Целью настоящего изобретения является повышение эффективности подавления периодических помех на выходе системы и уменьшение влияния инерционности линейных фильтров на динамику системы.
Поставленная цель достигается тем, что предлагаемая САР содержит третий линейный фильтр, вход которого соединен с выходом сумматора, а выход - с исполнительным элементом, и последовательно включенные третий блок умножения, четвертый линейный фильтр и четвертый блок умножения, выход которого связан со вторым входом сумматора, а косинусный выход источника гармонических сигналов соединен со вторыми входами четвертого и третьего блЬков умножения, при этом вход последнего подключен к выходу
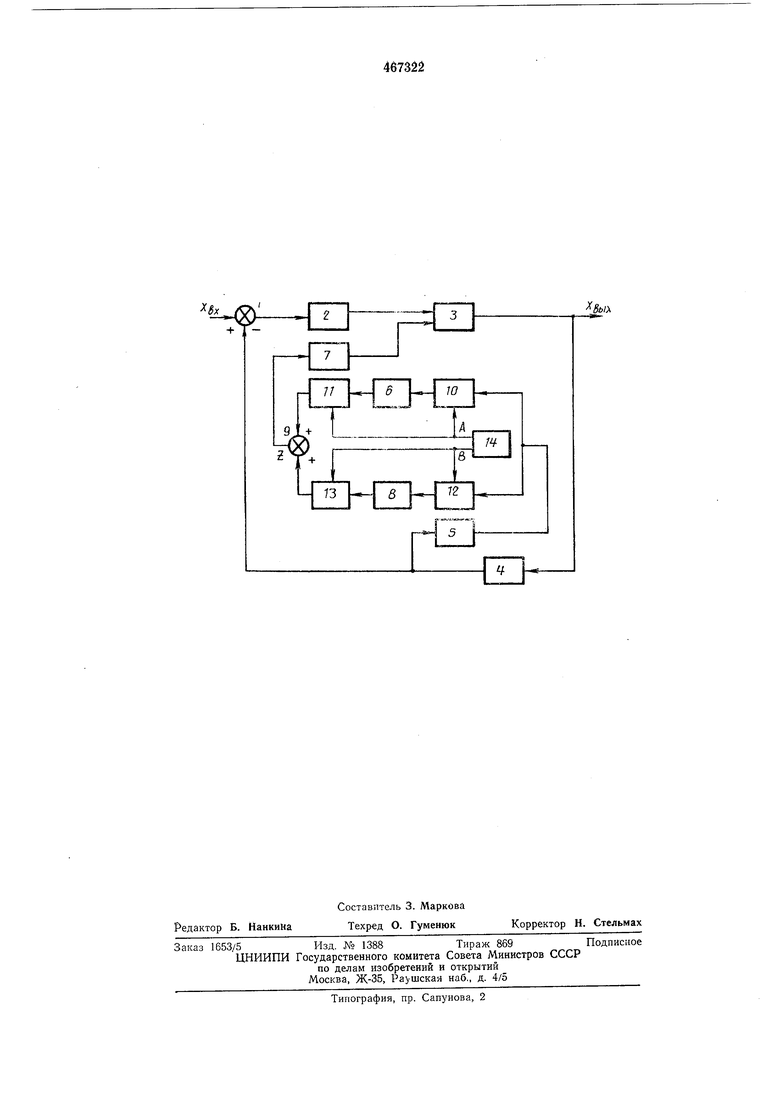
первого линейного фильтра, вход которого связан с выходом датчика обратной связи. На чертеже .показана блок-схема системы. Система содержит измеритель 1 рассогласования, корректирующий элемент 2, исполнительный элемент 3, датчик 4 обратной связи, линейные фильтры 5-8, сумматор 9, блоки умножения 10-13, источник 14 гармонических сигналов, имеющий синусный выход А и косинусный выход В.
Система работает следуюш,им образом.
При действии периодической помехи на выходе системы сигнал Хвых, иредставляющий собой сумму помехи и низкочастотной полезной составляющей, замеряется датчиком 4 обратной связи и через линейный фильтр 5 с коэффициентом передачи
/f. f,
А4
где К4 - коэффициент передачи датчика обратной связи, поступает на входы блоков умножения 10 и 12, на вторые входы которых подаются сигналы соответственно с синусного А и косинусного В выходов источника 14 с частотой помехи. Выделенные в результате синхронного детектирования, производимого блоками умнол ения 10 и 12, и последующего сглаживания линейными фильтрами б и 8 огибающие квадратурных составляющих гармоники помехи подвергаются модуляции в блоках умножения И и 13 с частотой помехи. После этого на выходе сумматора 9 имеем отфильтрованный сигнал помехи Z, который посредством линейного фильтра 7 преобразуется таким образом, чтобы, поступив па вход исполнительного элемента 3, он скомпенсировал присутствующ,ую на выходе системы периодическую помеху. С этой целью передаточная функция фильтра 7 выбирается равной
W,(p} ,W,(p)Wl(p),
где W2(p) - передаточная функция корректирующего элемента; 7з(р)-передаточная функция, которая выбирается равной:
а)в случае пренебрежительно малой инерционности исполнительного элемента:
Wl(p) , АЗ
где Кз - статический коэффициент передачи исполнительного элемента;
б)в случае инерционного исполнительного элемента:
-i
где WZ(P) - передаточная функция исполнительного элемента.
При этом подавляется периодическая помеха на выходе системы, замеряемая датчиком обратной связи, независимо от места ее приложения в контуре регулирования, причем влияние инерционности линейных фильтров на динамику системы уменьщается, так как передаточная функция предлагаемой системы оказывается представимой в виде
W(p - Bbix (Р)
Х,,(р)
W., (р) W (р)
l+W,(p)-K,W,,(p)W,(p)+K,W(p)W,(p)W,(p)
1
(р} W (Р)
-W,(p)X
X
l+K,W(p}W,(p)(p)
I
X
1 -I- Wk (р)
где Wii(p)- - передаточная функция
У(Р)
квадратурного фильтра; WKC:(P)-нередаточная функция исходной системы, что соответствует случаю вынесенного из контура регулирования квадратурного фильтра.
Следует отметить, что Wsfp) можно реализовать в диапазоне частот полосы пропускания квадратурного фильтра.
Предмет изобретения
Система автоматического регулирования,
содержащая последовательно соединенные измеритель рассогласования, корректирующий и исполнительный элементы и датчик обратной связи, выход которого соединен со входом измерителя рассогласования, а также
первый линейный фильтр, выход которого через последовательно включенные первый блок умножения, второй линейный фильтр и второй блок умножения соединен с первым входом сумматора, а синусный выход .источника
гармонических сигналов связан со вторыми входами блоков умножения, отличающаяся тем, что, с целью повышения эффективности подавления noiviex на выходе системы и уменьшения влияния инерционности линейных фильтров на динамику системы, она содержит третий линейный фильтр, вход которого соединен с выходом сумматора, а выход - с исполнительным элементом, и последовательно включенные третий блок умножения, четвертый линейный фильтр и четвертый блок умножения, выход которого связан со вторым входом сумматора, а косинусный выход источника гармонических сигналов соединен со вторыми входами четвертого и
третьего блоков умножения, при этом вход последнего подключен к выходу первого линейного фильтра, вход которого связан с выходом датчика обратной связи.
Вы),

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования | 1979 |
|
SU930232A2 |
| Система автоматического регулирования с компенсацией помех | 1980 |
|
SU941922A1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742950A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Устройство управления боковым движением летательного аппарата | 1990 |
|
SU1751717A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |