Изобретение относится к сельскохозяйственной технике, в частности к устройствам автоматического вождения машинно-тракторных агрегатов (МТА), и может быть использовано в системах с челночным способом вож- .дения.
Цель изобретения - расширение функциональных возможностей датчика за счет вьщеления сигнала направления при челночном способе движения агрегата.
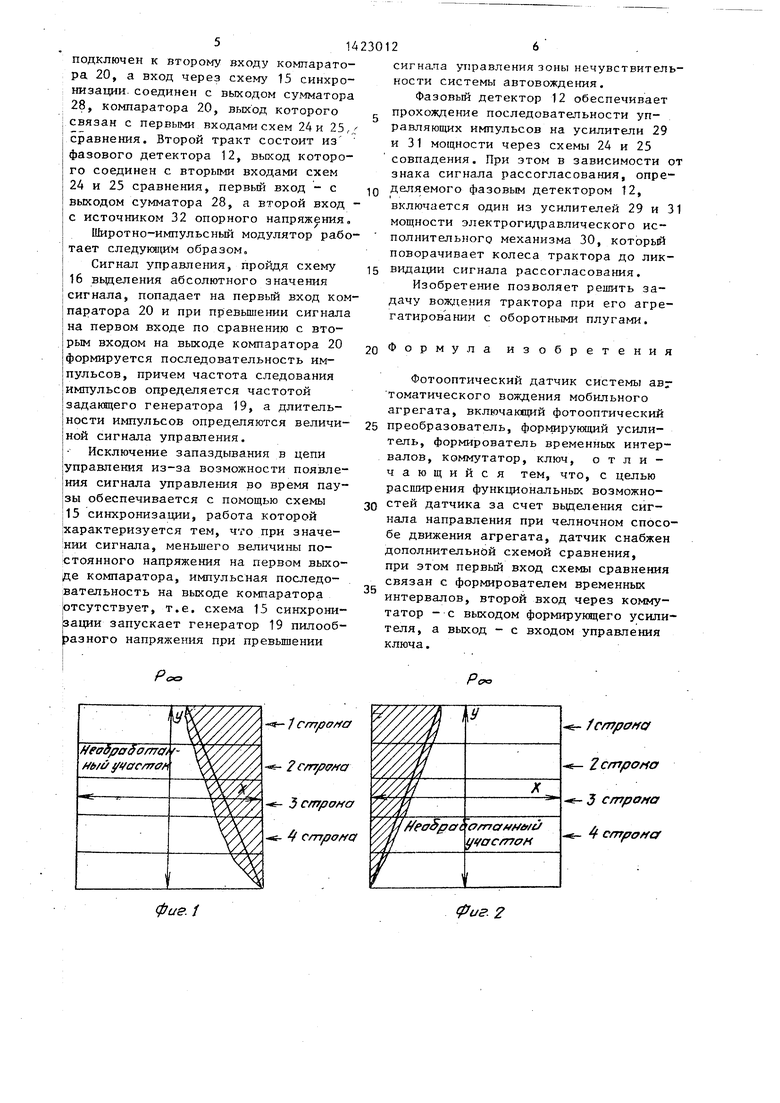
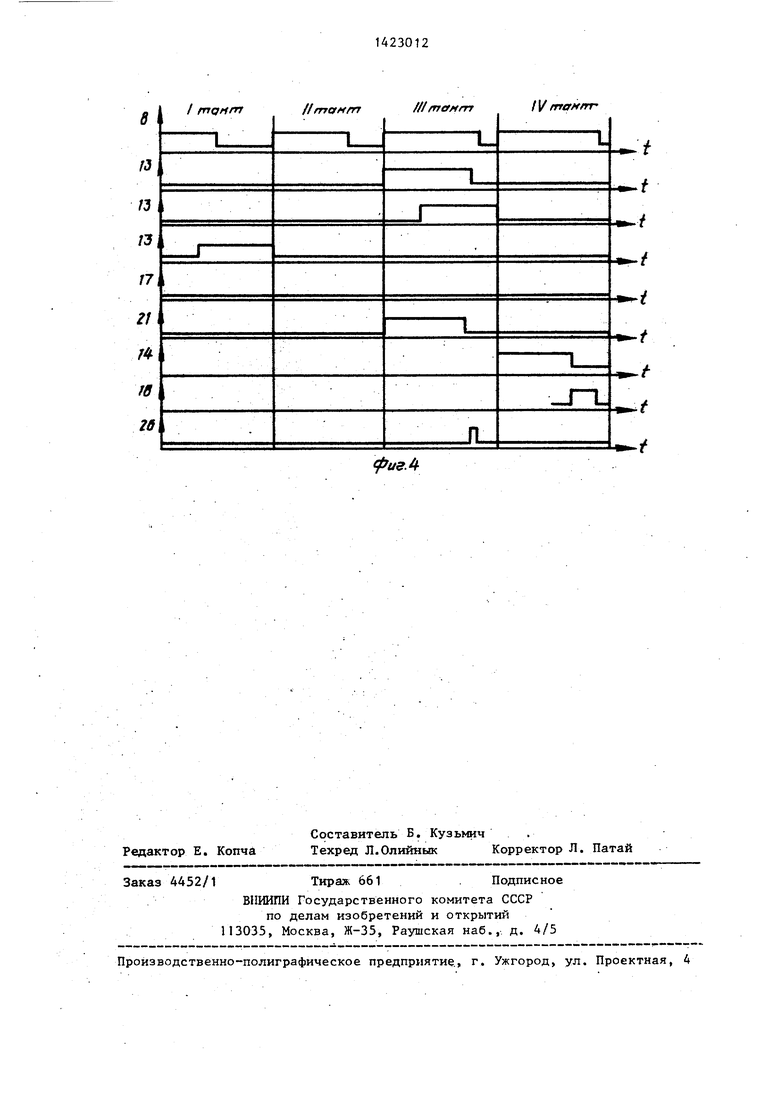
На фиг. 1 и 2 изображены базовые линии в виде светоконтрастного пере- хода между обработанными и необработанными участками поля,, проектируемыми на фотооптический преобразователь, при правостороннем и левостороннем положении ориентираотноситель но направления движения МТА; на фкг. 3 - функциональная схема фотооптического датчика; на фиг. 4 - временные диаграммы работы фотооптического датчика.
Фотооптический датчик системы автоматического вождения мобильного агрегата содержит (фиг. 2) оптическую систему 1, видикон 2, предусилитель 3, кольцевой счетчик 4 числа строк, генера- тор 5 строчной развертки, генератор 6 кадровой развертки, задающий гене- ратор 7 синхроимпульсов, усилитель - формирователь 8, дешифратор 9, источник 10 опорного напряжения, коммутатор 11, фазовый детектор 12, формирователь 13 временных интервалов, лини 14 задержки, компаратор 15, схему 16 вьделения абсолютного значения сигналов, схемы 17 и 18 сравнения, генератор 19 пилообразного напряжения, компаратор 20, управляемый ключ 21J функциональные преобразователи 22 и 23 длительность - аналог, схемы 24-26 сравнения, датчик 27 угла поворота управляемых колес, сумматор 28, усилитель 29 мощности, электро- Гидравлический преобразователь 30, усилитель 31 мощности, источник 32 опорного напряжения.
Предлагаемый датчик работает еле- дующим образом.
Датчик устанавливается на мобильном агрегате, причем оптическая ось фокусирующей системы совмещается с продольной осью агрегата, Оптичес- кая система 1- проектирует на чувствительный слой видикона 2 участок поверхности. Угол обзора оптической
е
JO
15 20 25
ЗО ,.
0
5
5
5
системы 1 и параметры системы сканирования генераторов. 5 и 6 строчной и кадровой развертки;, выбирают таким образом, чтобы изображение опорной траектории проектировалось на чувствительный слой видикона 2 независимо от того, расположена опорная траектория справа или слева по направлению движения. Электрический сигнал с выхода видикона 2 имеет амплитудный перепад, временное положение которого, отсчитьшаемое от начала строки, соответствует положению опорной траектории относительно границы сканируемого участка. Этот сигнал усиливается предусилителем 3 и фодми- руется усилителем-формирователем 8, на выходе которого получаете нормализованный по амплитуде-импульс, длительность которого пропорциональна расстоянию от границы сканируемого участка до опорной траектории. Син- хрогенератор 7, выходы которого соединены с входами управления мутатора 11, генераторами 6 и 5 строчной и кадровой развертки, кольцевым счетчиком 4 числа строк и формирователем 13 временных интервалов, обеспечивает синхронизацию работы всего устройства, разделяя ее, например, на четыре такта.
В течение первого такта сформированный сигнал изображения и соответствующий дежурной строке растра, например первой, с формирующего усилителя 8 проходит с сигнальных входов коммутатора 11 на его выход а. Управление коммутатором 11 осуществляется по входу управления е, подключенному. к выходу дешифратора 9, соединенного с кольцевым счетчиком 4, обеспечивая последовательное соединение сигнального входа коммутатора 11с выходом а в первом такте, выходом б во втором и т.д. На первый и второй входы схемы 17 сравнения, соединенные с выходом формирователя 13 и выходом а коммутатора 11, поступают соответственно сигнал первой строки и опорный сигнал. При этом длительность и полярность опорного сигнала U., (13) выбрана такой, что при правостороннем положении опорной траектории относительно направления движения на выходе схемы 17 сравнения появляется сигнал управления U (17), равный 0 Этот сигнал, поступая на вход управления ключа 21, обеспечивает прохож3142
дение через последний с формирователя 13 на первый вход схемы 26 сравнения опорного сигнала U (13), соответствующего правостороннему положению ориентира. При левостороннем положении ориентира сигнал на выходе схемы сравнения U (17) равен 1, что обеспечивает прохождение через управляемый ключ 21 с выхода формирователя 3 на первый вход схемы 26 сравнения опорных сигналов, соответствующих левостороннему положению Uj (13).
Во время второго такта счетчик 4 с дешифратором 9 обеспечивает прохож- дение через коммутатор 11 и линию 14 задержки на схему 18 сравнения, первый вход которой соединен через линию 14 задержки с выходом б коммутатора 11, а второй вход - с выходом г ком- мутатора 11, сформированного сигнала, соответствуюцего второй строке растра.
Во время третьего такта счетчик 4 с дешифратором 9 обеспечивает прохож- дение сигнала, соответствующего третьей строке растра, через выход в коммутатора 11 на второй вход схемы 26 сравнения. При этом на первый вход проходит сигнал формирователя 13 опорных временных интервалов и (13). При отсутствии линейного рассогласования относительно базовой линии длительности опорных и сигналь ных импульсов, проходящих на схему 26 сравнения, одинаковы и на выходе схемы 26 сравнения сигнал ошибки равен О. При отклонении трактора от заданного направления временные соотношения нарушаются и на выходе схемы 26 сравнения появляется широтно-модулированный сигнал, длительность которого пропорциональна величине линейного рассогласования, а полярность определяет направление отклонения от- носительно базовой линии.
Во время четвертого такта кольцевой счетчик 4 с дешифратором 9 обеспечивает прохождение сигнала, соответствующего последней строке растра, через выход г коммутатора 11 на второ вход схемы 18. Параметры линии 14 задержки выбраны таким образом, чтобы согласовать время прихода на. хему 18 сравнения сигналов второй и четвертой строк.
Ввделение сигнала, пропорциональ- Чого углу рассогласования между продольной осью агрегата и базовой ли
5 0
5 о
5
0
0
12
нией, производится путем сравнения длительности импульсов, приходящих на схему 18 сравнения. При отсутствии угла рассогласования разность длительностей сигналов второй и четвертой строк равна наперед заданной величине, определяемой конструктивными параметрами установки датчика на МТА при визировании его оптической оси на точку Р, которая компенсируется с помощью источника 32 опорного напряжения, подключенного к второму входу преобразователя длительность - аналог, и поэтому выходной сигнал и (23) равен . О.
При появлении угла рассогласования временные соотношения нарушаются и на выходе схемы 18 сравнения появляется., широтно-модулированньш сигнал, длительность которого пропорциональна курсовому рассогласованию, а полярность определяет его направление.
Сигналы рассогласования с выходов схем 26 и 18 сравнения через преобразователи 22 и 23 длительность - аналог поступают на второй и третий выходы сумматора 28.
Преобразователь длительность -. анал.ог при этом может быть вьтолнен в виде последовательно соединенного интегратора со сбросом и фильтра низких частот. В качестве интегратора со сбросом может быть использован операционный усилитель с время- задающей цепочкой, полевой транзистор, включенный параллельно интегрирующей емкости, сбрасьшает напряжение до нулевого значения в конце каждой строки. Фильтр низких частот может быть также вьтолнен на операционном
усилителе с соответствукяцей времяза- дающей цепочкой, определяющей полосу среза.
На первьй вход сумматора 28 приходит сигнал обратной связи с датчика 27 угла поворота управляющих колес, при этом коэффициенты передачи по каждому из информационных- входов бираются таким образом, чтобы обеспечить требуемый закон регулирования. С выхода сумматора 28 сигнал управления проходит по двум трактам. Первый тракт состоит из схемы 1.6 вьщеле- ния абсолютного значения сигнала вход которой соединен с выходом сум- . матора 28, а выход - с первым входом компаратора 20, генератора 19 пилообразного напряжения, выход которого
1 cmfloffa
2c/r7/yyffa J страна cm/ooffc/
Ж
Ш
///ij amoHf McJ
VCfCfrraH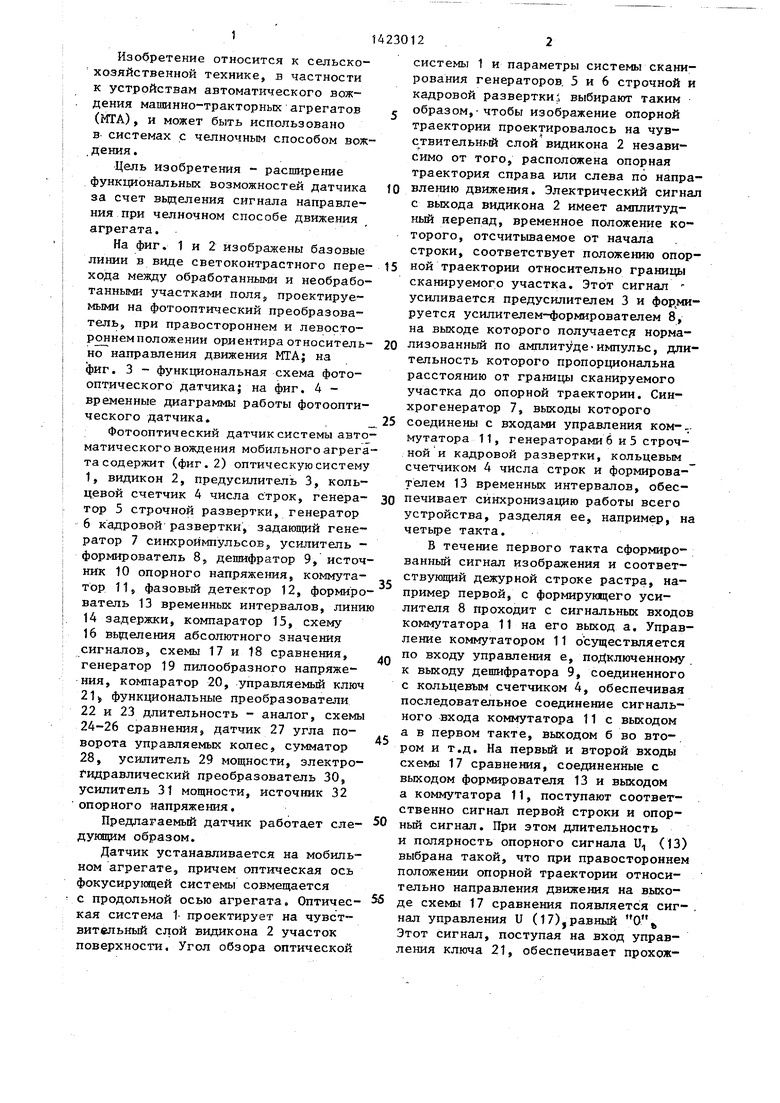

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU648156A1 |
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| Способ местоопределения тракторного агрегата и устройство для осуществления | 2015 |
|
RU2607337C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2003 |
|
RU2249841C1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2255853C1 |
| ИНДУКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА НАХОЖДЕНИЯ ТРАКТОРНЫХ АГРЕГАТОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670490C1 |
| Обучающее устройство | 1981 |
|
SU1015414A1 |
Изобретение относится к сельскохозяйственной технике , в частности к устройствам автоматического вождения машинно-тракторных агрегатов,и может использоваться в системах с челночным способом вождения. Цель изобретения - расширение функциональных возможностей датчика за счет вьщеления f -;/ сигнала.направления при челночном способе движения агрегата. Изобретение обеспечивает измерение координат следа на местности относительного агрегата, расширяет функциональные возможности датчика благодаря авт.омати- ческой коммутации на схему 16 вццеле- ния сигнала рассогласования информа- 1ЩОННОГО сигнала, соответствующего положению траектории относительно на-в правления движения. Датчик, включающий фотооптический преобразователь 12, формирующий усилитель 3, формирователь 13 временных интервалов, коммутатор 11, ключ 21, дополнительно снабжен схемой 26 сравнения, при зтом первый вход схемы 26 сравнения связан с формирователем 13 временных интервалов, второй вход через коммутатор 11 - с выходом формирующего усилителя 3, а выход - с входом уп- : равления ключа 21. 4 ил. (Л cfjve.3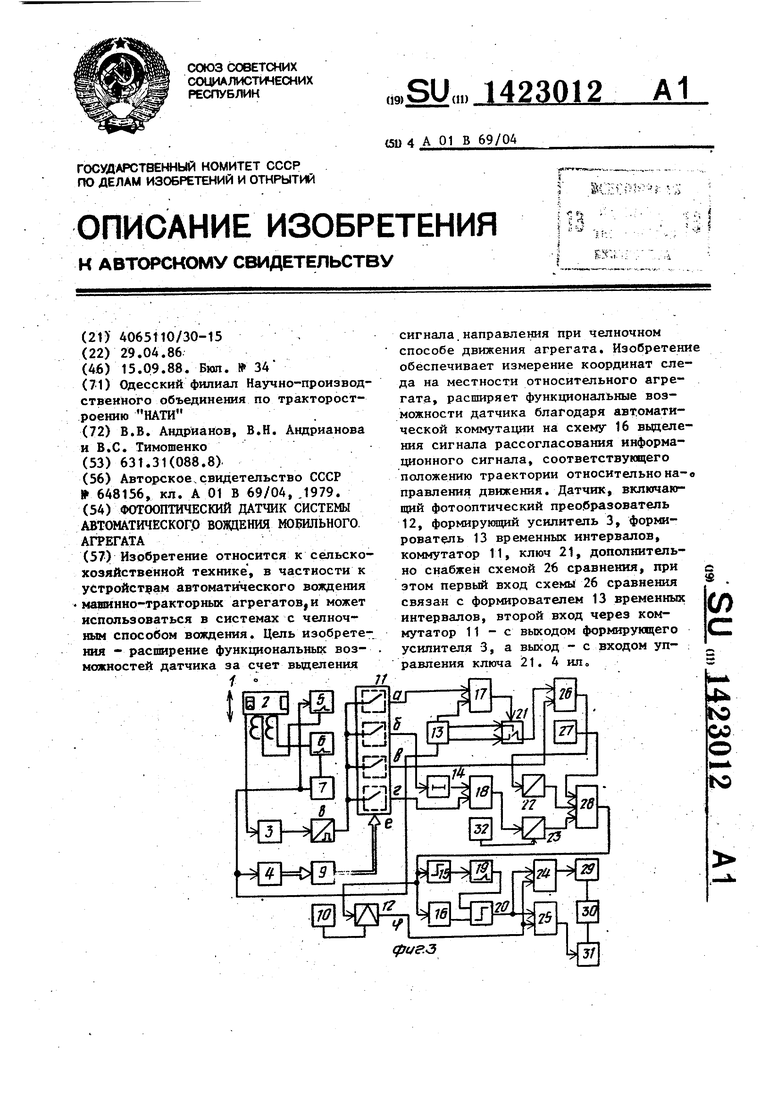
фие. 1
(аг. 2
ригЛ
| Авторское,свидетельство СССР 1 648156, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
