Изобретение относится к вычислительной технике и может быть исполь- зовано, например, для исследования поведения различных транспортньи средств или его оборудования при движении по волнистой поверхности,
Цель изобретения - повьшшние точности моделирования.,
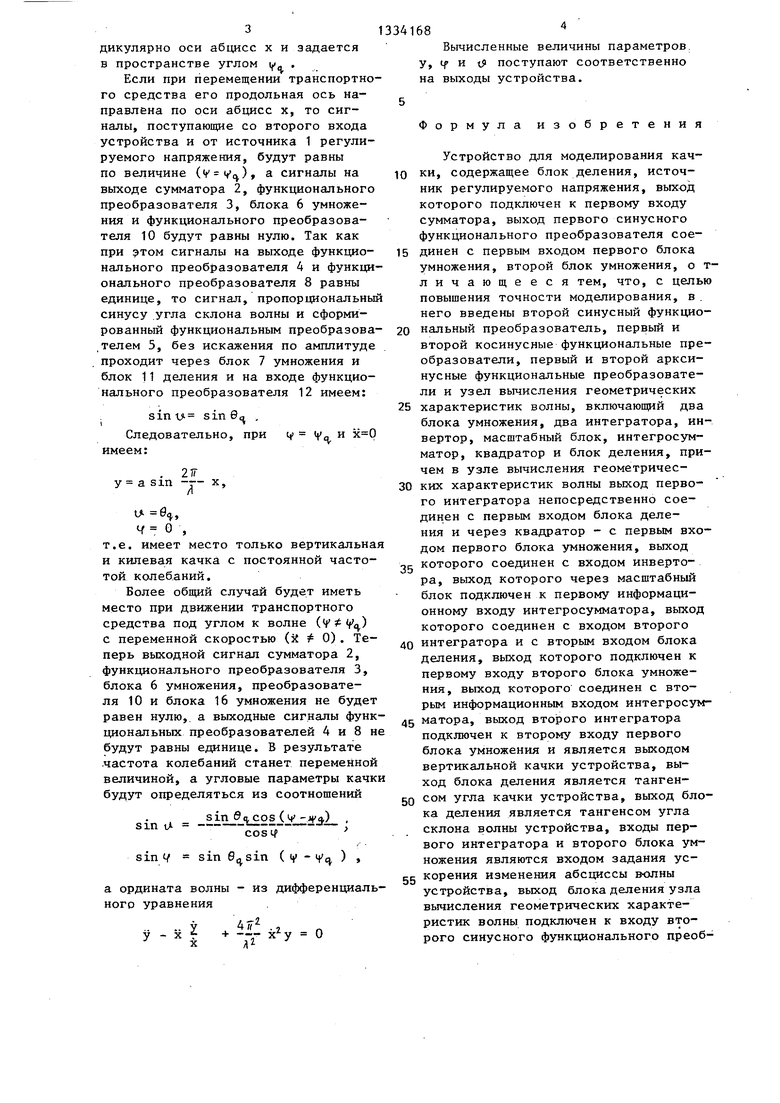
На фиг.1 изображена структурно- функциональная схема предлагаемого устройства на фиг.2-- схема блока вычисления геометрических характеристик волны.
На фиг.1 и 2 приняты следующие обозначения,а иД - амгшитуда и длина волны
X и у - абцисса и ордината волны;
0( - угол склона волны
у„ - угол курса бега волн;
(fi - угол курса транспортного
средства;
t и tf- углы дифферента и крена транспортного средства.
Устройство содержит источник 1 регулируемого напряжения, сумматор 2 первый синусный функциональный преоб- рователь 3, первый косинусный функциональный преобразователь 4, второй синусный функциональный преобразователь 5, первый 6 и второй 7 блоки умножения, второй косинусный функциональный преобразователь 8, узел 9 вычисления -геометрических характеристик волны, первый арксинусный функцио- „нальный преобразователь 10, блок 11 деления, второй арксинусный функцио нальный преобразователь 12.
Узел 9 вычисления геометрических характеристик волны содержит первый интегратор 13, квадратор 14, пер- .ВЫ.Й 15 и второй 16 блоки умножения, инвертор 17, масштабный блок 18, интегросумматор 19, блок 20 деления и второй интегратор 21,
.Функ1Щональные преобразователи 3, 4,8 и 5 служат для получения функций sin(if-v), cos (у -Ус), cos I/
и з1п94 гг--- - .
)2
Источник регулируемого напряжения предназначен для задания величины, пропорциональной .
Сумматор 2 предназначен для полу- чения разности (- „ ,
На преобразователях 10 и 12 выполняются нелинейные операции вычисления обратных тригонометрических функ10
15
0
25
35
40 45
50
30
gg
ций для угла (/ крена и угла t дифферента.
Устройство работает следующим образом.
Предварительно устанавливают коэффициенты и начальные условия на масштабном блоке 18, первом интеграторе 13 и интегросумматоре 19. Устанавливаемые величины должны быть пропорциональны: на масштабном блоке 181/7Г2
вьфажению --j , на первом интеграторе 13 - начальной скорости измене- .ни абсциссы волны Хд , на интегросумматоре 19 - вьфажению -- TtL у . Если сигнал х на входе устройства равен нулю, то равным будет и сигнал, подаваемый с выхода блока 16 на первый вход интегросумматора 19, а сигналы х и х на выходах интегратора 13 и квадратора 14 будут посто-, янными. Под воздействием начального напряжеш{я на интегросумматоре 19 сигнал на выходе интегратора 21 по абсолютной величине возрастает.
Проходя по цепи: блок 15 умножения, инвертор 17 и масштабный блок 18, этот сигнал поступает на второй вход интегросумматора 19, уменьшая первоначально установленное на нем напряжение. В рассматриваемом частном случае (при х о) замкнутый контур, образованный интегросуммато- ром 19, интегратором 21, блоком 15 умножения, инвертором 17 и масштабным блоком 18, функционирует таким ч образом, что на выходах интегратора 21 и блока 20 деления формируются геометрические характеристики волны у и у/х, где у является ординатой волны и характеризует вертикальную качку, а у/х численно равна танген- . су угла склона волны, т.е. у/х tg 0„ , При этом ордината волны и тангенс угла склона волны представляется следующими функциями абциссы х.
, 2 sin -V- X,
2 2
Т °5 Т
где абцисса х изменяется равномерно.
Первая их этих функций удовлетворяет дифференциальному уравнению
.. 4(Г .2 „ у + -,- х2у о
и описывает волнистую поверхность, фронт которой ориентирован перпендикулярно оси абцисс х и задается в пространстве углом у- ,
Если при перемещении транспортного средства его продольная ось направлена по оси абцисс х, то сигналы, поступающие со второго входа устройства и от источника 1 регулируемого напряжения, будут равны по величине (V Vc), а сигналы на выходе сумматора 2, функционального преобразователя 3, блока 6 умножения и функционального преобразователя 10 будут равны нулю. Так как при 9ТОМ сигналы на выходе функционального преобразователя 4 и функционального преобразователя 8 равны единице, то сигнал, пропорциональный синусу .угла склона волны и сформированный функциональным преобразова- ,телем 5, без искажения по амплитуде проходит через блок 7 умножения и блок 11 деления и на входе функционального преобразователя 12 имеем:
sin и sin 0CJ , Следовательно, при Ц у,, и
имеем:
2F
у а sin --- X, /1
, ,
т.е. имеет место только вертикальная и килевая качка с постоянной частотой колеб.аний.
Более общий случай будет иметь место при движении транспортного средства под углом к волне (f Ф а с переменной скоростью (з{ 0) . Теперь выходной сигнал сумматора 2, функционального преобразователя 3, блока 6 умножения, преобразователя 10 и блока 16 умножения не будет равен нулю,, а выходные сиг.налы функциональных преобразователей 4 и 8 не будут равны единице. В результате .частота колебаний станет переменной величиной, а угловые параметры качки будут определяться из соотношений
sin а
S in Q ( . costf/
sin t/ sin ( v - Vcj. )
a ордината волны - из дифференциального уравнения
у - X
X
. 0
Вычисленные величины параметров, у, tf и t9 поступают соответственно на выходы устройства.
Формула изобретения
Устройство для моделирования качки, содержащее блок деления, источник регулируемого напряжения, выход которого подключен к первому входу сумматора, выход первого синусного функционального преобразователя соединен с первым входом первого блока умножения, второй блок умножения, о т- личающееся тем, что, с целью повышения точности моделирования, в него введены второй синусный функциональный преобразователь, первый и
второй косинусные функциональные преобразователи, первый и второй аркси- нусные функциональные преобразователи и узел вычисления геометрических
характеристик волны, включающий два блока умножения, два интегратора, инвертор, масштабный блок, интегросум- матор, квадратор и блок деления, причем в узле вычисления геометрических характеристик волны выход первого интегратора непосредственно соединен с первым входом блока деления и через квадратор - с первым входом первого блока умножения, выход
которого соединен с входом инвертора, выход которого через масштабный блок подключен к первому информационному входу интегросумматора, выход которого соединен с входом второго
интегратора и с вторым входом блока деления, выход которого подключен к первому входу второго блока умножения, выход которого соединен с вторым информационным входом интегросумматора, выход второго интегратора подключен к второму входу первого блока умножения и является выходом вертикальной качки устройства, выход блока деления является тангенсом угла качки устройства, выход блока деления является тангенсом угла склона волны устройства, входы первого интегратора и второго блока умножения являются входом задания ускорения изменения абсциссы волны устройства, выход блока деления узла вычисления геометрических характеристик волны подключен к входу второго синусного функционального преоб51
разо вателя, выход которого соединен ,с вторым входом первого блока умножения и с первым входом второго бло- ка умножения, вьрсод которого подключен к первому входу блока деления, выход которого соединен с входом второго арксинусного функционального преобразователя, выход которого является выходом угла дифферента устройства, выход первого блока умножения подключен к входу первого арксинусного функционального преобразователя, выход которого является выхо
341686
дом угла крена устройства и соединен с входом второго косинусного функционального преобразователя, выход ко- торого подключен к второму входу блока деления, выход сумматора соединен с входом первого синусного функционального преобразователя и с входом первог о косинусного функционального
10 преобразователя,выход которого сое- динен с вторым входом второго блока умножения, второй вход сумматора соединен с входом .задания угла курса устройства.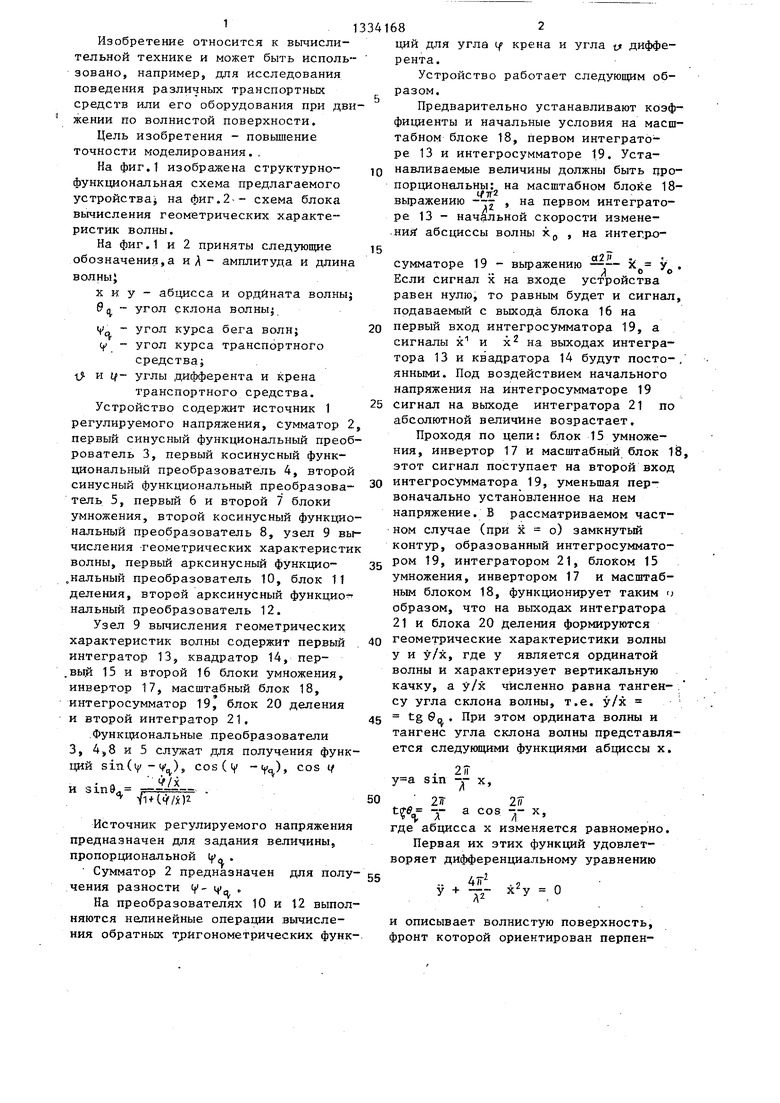
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат вектора | 1984 |
|
SU1196857A1 |
| Имитатор морского волнения | 1981 |
|
SU1116440A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2013 |
|
RU2524034C1 |
| Устройство для предотвращения столкновений судов-сателлитов | 1983 |
|
SU1144136A1 |
| Устройство для контроля положения забоя | 1991 |
|
SU1816856A1 |
| Вычислитель угла атаки | 1983 |
|
SU1129630A1 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Преобразователь угловых перемещений в код | 1982 |
|
SU1035627A1 |
| Устройство для определения координат траектории скважины | 1980 |
|
SU909145A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
Изобретение относится к вычислительной технике и может быть использовано, например, для исследования поведения различных транспортных средств или оборудования при движении по волнистой поверхности. Цель изобретения - повьшение точности моделирования. Указанная цель достигается введением в устройство второго синусного функционального, косинусных и арксинусньгх функциональных преобразователей и узла вычисления геометрических характеристик волны. Устройство позволяет воспроизводить ординаты волны и тангенса угла склона волны, а также определять текущие значения узлов, характеризующие бортовую и килевую качку. При этом воспроизведение всех параметров качки осуществляется таким образ ом, что. их изменение взаимосвязано во времени и привязано к одной и ;Той же точке волнистой поверхности. 2 ил. (Л со оо ; bt 00
Вх.2
ВШ,1 Y
Фиё,/
фиг. 2
Составитель И.Дубнина;
Редактор А.Ревин Техред Л.Сердюкрва Корректор А.Тяско
Заказ 3965/47 Тираж 672Подписное
ВНИИПИ Государственного комитета СССР по д«лам изобретений и открытий 113035, Москва,Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 913411, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Имитатор морского волнения | 1981 |
|
SU1116440A2 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
