Изобретение относится к автоматике и может быть использовано при проектировании систем автоматического управления параметрически неопределенными объек- тами.
Известна система автоматического управления (САУ) нестационарным объектом N-го порядка [1] содержащая элемент сравнения, который подключен одним входом к задатчику, другим входом к выходу объекта управления, выходом к входу корректирующего устройства, выполненного в виде последовательно соединенных интегратора, М-1 интегросумматоров и суммирующего усилителя, при этом вход интегратора и один из входов каждого интегросумматора и суммирующего усилителя подсоединены к выходу элемента сравнения, другой вход последних N-1 интегросумматоров и вход объекта управления подключены к выходу суммирующего усилителя, причем М ≥ 2N-1.
Эта САУ обеспечивает заданную динамическую точность при управлении объектами с аддитивной нелинейной собственной обратной связью, т. е. объектами с математическим описанием вида
y(N)=Ku-ϕ1(y, ,y(N-1),t), (1) где y, y, y(N) выходная управляемая величина и ее производные до N-го порядка;
,y(N-1),t), (1) где y, y, y(N) выходная управляемая величина и ее производные до N-го порядка;
u управляющее воздействие;
ϕ1 (.) однозначная нелинейная нестационарная функция, аналитичеcкая относительно своих аргументов;
К постоянный коэффициент.
Однако рассматриваемая САУ не может обеспечить заданную динамическую точность при управлении объектами с аддитивно-параметрической нелинейной собственной обратной связью, т. е. объектами с математическим описанием вида
y(N)= ϕ2(y,  ,y(N-1))·u-ϕ1(y,
,y(N-1))·u-ϕ1(y, ,y(N-1),t), (2) где ϕ2 (.) однозначная нелинейная стационарная функция, аналитическая относительно своих аргументов.
,y(N-1),t), (2) где ϕ2 (.) однозначная нелинейная стационарная функция, аналитическая относительно своих аргументов.
Известна также САУ нестационарным объектом N-го порядка [2] содержащая элемент сравнения, который подключен одним входом к задатчику, другая входом к выходу объекта, выходом ко входу корректирующего устройства, выполненного в виде последовательно соединенных интегратора, М-1 интегросумматоров и суммирующего усилителя, при этом вход интегратора и один из входов всех интегросумматоров и суммирующего усилителя подсоединены к выходу элемента сравнения, другой вход последних N-1 интегросумматоров подключен к выходу суммирующего усилителя, причем М ≥ 2N-1, нелинейный функциональный преобразователь и N широкополосных фильтров, каждый i-й из которых выполнен в виде М последовательно соединенных интегросумматоров i/1 + i/М, второй вход каждого из которых подсоединен к выходу последнего интегросумматора своего широкополосного фильтра, третий вход первых М-i + 1 интегросумматоров каждого i-го широкополосного фильтра подсоединен к задатчику, четвертый вход первых М-i интегросумматоров i-го (i 1, 2, N) широкополосного фильтра подключен к выходу объекта, первый вход первого интегросумматора первого широкополосного фильтра подключен к выходу интегратора, первый вход первого интегросумматора каждого последующего j-го (j 2, 3, N) широкополосного фильтра подключен к выходу (j-1/-го интегросумматора корректирующего устройства, а выходы поcледних интегроcумматоров широ- кополоcных фильтров и cуммирующего уcилителя корректирующего уcтройcтва подсоединены ко входам нелинейного функционального преобразователя, который выходом подключен ко входу объекта.
Эта САУ может обеспечить заданную динамическую точность при управлении параметрически не полностью определяемыми объектами с аддитивно-парамет- рической нелинейной собственной обратной связью, т. е. объектами с математическим описанием вида (2). Однако она не может гарантировать заданную динамическую точность при управлении параметрически полностью неопределенными объектами, т. е. объектами с математическим описанием вида
y(N)= ϕ2(y,  ,y(N-1))·u-ϕ1(y,
,y(N-1))·u-ϕ1(y, ,y(N-1),t), где ϕ2 (.) однозначная нестационарная функция, аналитическая относительно своих аргументов.
,y(N-1),t), где ϕ2 (.) однозначная нестационарная функция, аналитическая относительно своих аргументов.
К тому же рассматриваемая САУ является достаточно сложной, так как помимо функционального преобразователя содержит еще и N каналов формирования его входных сигналов.
Цель изобретения обеспечение заданной динамической точности при управлении параметрически полностью неопределенными объектами.
Поставленная цель достигается тем, что в систему автоматического управления нестационарным объектом N-го порядка, содержащую задатчик, элемент сравнения, который подключен одним входом к выходу объекта, выходом ко входу корректирующего устройства, выполненного в виде последовательно соединенных интегратора, М-1 интегросумматоров и суммирующего усилителя, при этом вход интегратора и один из входов первых N-1 интегросумматоров подcоединены к выходу элемента cравнения, другой вход поcледних N-1 интегроcумматоров подключен к выходу суммирующего усилителя, введены эталонная модель, блок умножения, усилитель, три инерционных фильтра, блок деления, три суммирующих элемента, два блока выделения модуля входной величины, источник напряжения смещения и дифференцирующий фильтр, выполненный в виде последовательно соединенных N интегросумматоров и суммирующего усилителя, причем задатчик подсоединен к третьему входу N-го интегросумматора корректирующего уст- ройства и ко входу эталонной модели, которая выходом подключена к другому входу элемента сравнения, блок умножения соединен одним входом с выходом суммирующего усилителя корректирующего устройства, другим входом с выходом блока деления, выходом через усилитель со входом объекта и через первый инерционный фильтр со входом первого блока выделения модуля, подключенного выходом к одному из входов первого суммирующего элемента, который соединен другим входом с выходом источника напряжения смещения, выходом с одним из входов блока деления, второй суммирующий элемент подключен одним входом к задатчику, другим входом к выходу суммирующего усилителя корректирующего устройства, выходом через второй инерционный фильтр к одному из входов первого интегросумматора дифференцирующего фильтра, другой из входов всех интегросумматоров которого подсоединен через третий инерционный фильтр к выходу объекта, третий из входов интегросумматоров дифференцирующего фильтра соединен с выходом своего суммирующего усилителя, один из входов которого, третий вход последних М-N интегросумматоров и один из входов суммирующего усилителя корректирующего устройства подключены к выходу объекта, третий суммирующий элемент подсоединен одним входом через второй блок выделения модуля к выходу суммирующего усилителя дифференцирующего фильтра, другим входом к выходу источника напряжения смещения, выходом к другому входу блока деления, а N ≅M≅ 2N-1.
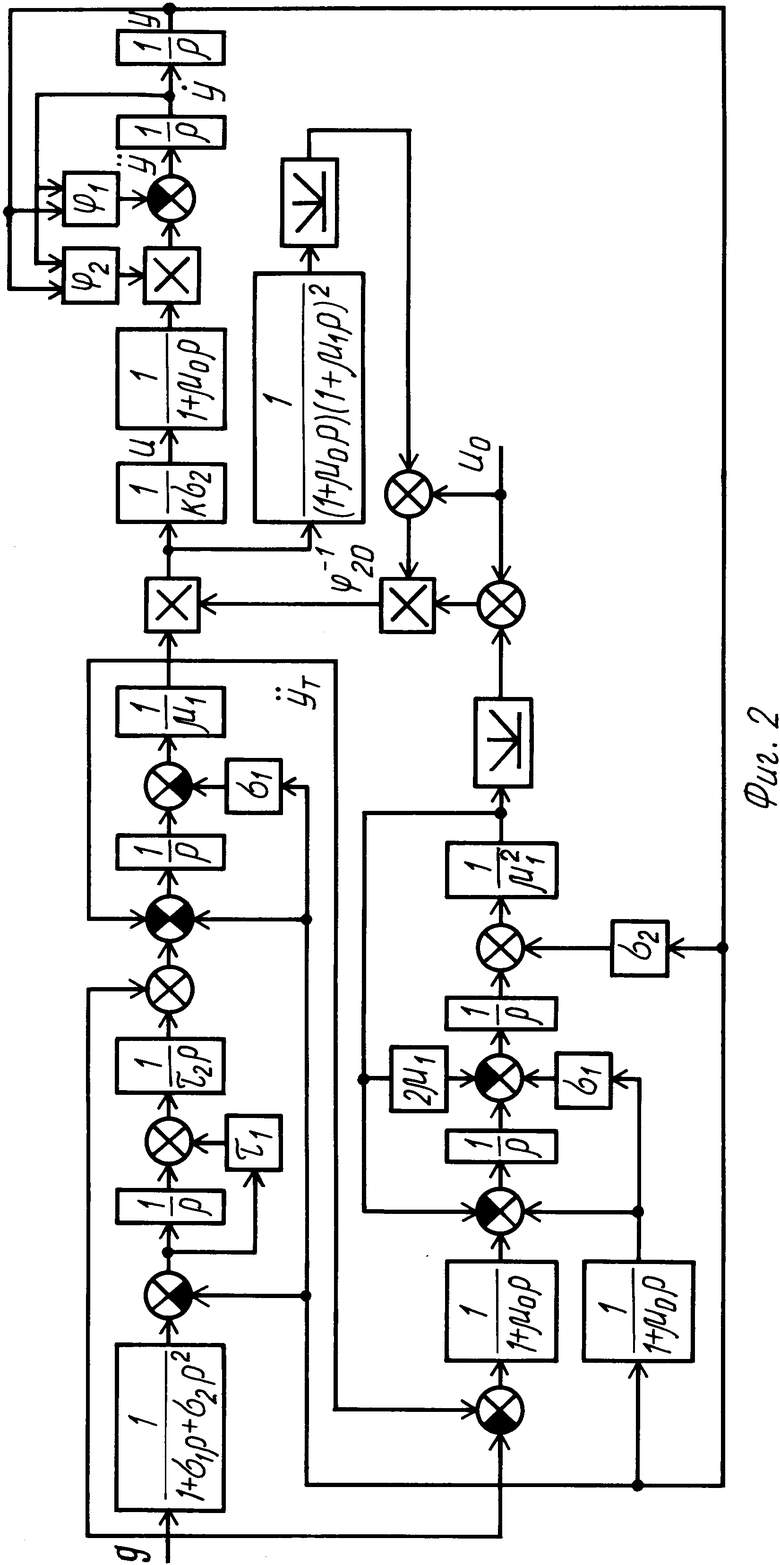
На фиг. 1 приведена структурная схема системы автоматического управления нестационарным объектом; на фиг. 2 то же, для случая с N-2 и М-3.
Система автоматического управления нестационарным объектом N-го порядка содержит задатчик 1, элемент 2 сравнения, который подключен одним входом к выходу объекта 3, выходом к входу корректирующего устройства 4, выполненного в виде последовательно соединенных интегратора 5, М-1 интегросумматоров 6/1-6/(М-1) и суммирующего усилителя 7, при этом вход интегратора 5 и один из входов первых N-1 интегросумматоров 6/1-6/(N-1) подсоединены к выходу элемента 2 сравнения, другой вход последних N-1 интегросумматоров 6/(М-N+1) -6/(М-1) подключен к выходу суммирующего усилителя 7, эталонную модель 8, блок 9 умножения, усилитель 10, три инерционных фильтра 11-13, блок 14 деления, три суммирующих элемента 15-17, два блока 18 и 19 выделения модуля входной величины, источник 20 напряжения смещения, дифференцирующий фильтр 21, выполненный в виде последовательно соединенных N интегросумматоров 22/1-22/N и суммирующего усилителя 23, причем задатчик 1 подсоединен к третьему входу N-го интегросумматора 6/N корректирующего устройства 4 и ко входу эталонной модели 8, которая выходом подключена к другому входу элемента 2 сравнения, блок 9 умножения соединен одним входом с выходом суммирующего усилителя 7 корректирующего устройства 4, другим входом с выходом блока 14 деления, выходом через усилитель 10 со входом объекта 3 и через первый инерционный фильтр 11 со входом первого блока 18 выделения модуля, подключенного выходом к одному из входов первого суммирующего элемента 15, который соединен другим входом с выходом источника 20 напряжения смещения, выходом с первым из входов блока 14 деления, второй суммирующий элемент 16 подключен одним входом к задатчику 1, другим входом к выходу суммирующего усилителя 7 корректирующего устройства 4, выходом через второй инерционный фильтр 12 к одному из входов первого интегросумматора 22/1 дифференцирующего фильтра 21, другой из входов всех интегросумматоров 22/1-22/N которого подсоединен через третий инерционный фильтр 13 к выходу объекта 3, третий из входов интегросумматоров 22/1-22/N дифференцирующего фильтра 21 cоединен c выходом cвоего cуммирующего уcилителя 23, один из входов которого, третий вход поcледних M-N интегроcумматоров 6N-6/(М-1) и один из входов cуммирующего уcилителя 7 корректирующего уcтройcтва 4 подключены к выходу объекта 3, третий cуммирующий элемент 17 подcоединен одним входом через второй блок 19 выделения модуля к выходу cуммирующего уcилителя 23 дифференцирующего фильтра 21, другим входом к выходу источника 20 напряжения смещения, выходом к другому входу блока 14 деления, а N ≅M≅ 2N-1.
Математическое описание объекта управления и управляющего устройства системы автоматического управления нестационарным объектом N-го порядка можно представить в виде следующей системы уравнений =u-u1; y(N)=ϕ2(y,
=u-u1; y(N)=ϕ2(y, ,y(N-1))·u1-ϕ1(y,
,y(N-1))·u1-ϕ1(y, ,y(N-1),t);
,y(N-1),t);
(3)
 , где y,
, где y,  , y(N) выходная управляемая величина и ее производные по времени (t) до N-го порядка включительно;
, y(N) выходная управляемая величина и ее производные по времени (t) до N-го порядка включительно;
u управляющее воздействие;
μo эквивалентная малая некомпенсируемая постоянная времени объекта управления;
ϕ1 (.), ϕ2 (.) однозначные нелинейные нестационарные функции, аналитические относительно своих аргументов;
К постоянный коэффициент, значение которого выбирают априори равным приближенному значению функции ϕ2 (.) в точке номинального режима работы, K ≈ ϕ2(yo,  ,y
,y 1
1

 (4) g выходной сигнал задания задатчика;
(4) g выходной сигнал задания задатчика;
uo напряжение смещения источника напряжения смещения, необходимое для устранения неопределенности результата деления в блоке деления при равенстве нулю выходного сигнала суммирующего усилителя дифференцирующего его фильтра;
μ1 малая постоянная времени управляющего устройства, значение которой выбирают таким, чтобы обеспечить требуемую по условиям помехозащищенности полосу частот равномерного пропускания высокочастотной части системы;
τi, σi, (i 1, 2, N) постоянные времени соответственно низкочастотной и среднечастотной части системы, значения которых определяют из соотношений
τN2Ti2/TN2≅τi2=2τi-1τi+1;
τN=2τN-1σ;σi2=2σi-1σi+1
(i 1,2, N-1); σN=2(M N + 1) σN-1μ1;
μ1≥μo, где Ti(i 1, 2, N) граничные из рабочего диапазона изменения значения коэффициентов линеаризованного уравнения объекта
(1+μoP) 1+
1+ TiP
TiP y ku
y ku
Система автоматического управления нестационарным объектом работает следующим образом.
Сигнал задания с выхода задатчика 1 поступает на входы интегросумматора 6N корректирующего устройства 4 и эталонной модели 8, выполненной, например, в виде последовательно соединенных N интегросумматоров, один из входов каждого из которых подключен к выходу последнего N-го интегросумматора. При изменении сигнала задания начинают изменяться и выходные сигналы суммирующего усилителя 7 корректирующего устройства 4 и эталонной модели 8. В свою очередь выходной сигнал суммирующего усилителя 7 корректирующего устройства 4 поступает на один из входов блока 9 умножения. Это входной сигнал в блоке 9 умножения умножаетcя на другой входной сигнал, поступающий с выхода блока 14 деления. Результирующий сигнал с выхода блока 9 умножения, пропорциональный управляющему воздействию u, поступает через усилитель 10 на вход объекта 3 и через последовательно соединенные инерционный фильтр 11, блок 18 выделения модуля и суммирующий элемент 15 на один из входов блока 14 деления. На другой вход блока 14 деления поступает через блок 19 выделения модуля и суммирующий элемент 17 выходной сигнал суммирующего усилителя 23 дифференцирующего блока 21. В свою очередь на одном из входов интегросумматоров 22/1-22/N дифференцирующего блока 21 поступает через инерционный фильтр 13 выходной сигнал объекта 3, на другой вход интегросумматора 22/1 через инерционный фильтр 12 и суммирующий элемент 16 выходные сигналы задатчика 1 и суммирующего усилителя 7 корректирующего устройства 4, а на один из входов суммирующего усилителя 23 выходной сигнал объекта 3. В дифференцирующем блоке 21 его входные сигналы преобразуются в сигнал, пропорциональный произведению управляющего воздействия u на функцию ϕ2(.), т. е. ϕ2 (.) ˙ u. В результате же деления сигнала, пропорционального u, на сигнал, пропорциональный ϕ2(.) ˙ u, в блоке 14 деления образуется сигнал ϕ20-1, обратно пропорциональный значению функции ϕ2 (.). Так как этот сигнал поступает на один из входов блока 9 умножения, то тем самым через блок 9 умножения замыкается параметрическая обратная связь по функциональному параметру ϕ2 (.). За счет этой параметрической обратной связи обеспечивается единичный коэффициент усиления разомкнутой системы автоматического управления независимо от того, что какое бы значение не принимала функция ϕ2(.).
При этом если рассматривать функции ϕ1(.) и ϕ2 (.) в системе уравнений [3] как возмущения, то образуемый указанной параметрической обратной связью внутренний контур регулирования системы автоматического управления (см. фиг. 1 и фиг. 2) служит для отработки параметрического возмущения ϕ2 (.).
Одновременно с достаточно быстрой отработкой возмущения ϕ2 (.) в системе автоматического управления осуществляется отработка и аддитивного возмущения ϕ1(.), но, правда, с менее высокой скоростью. В частности, в результате поступления на один из входов интегросумматоров 6/N-6/(М-1) и суммирующего усилителя 7 корректирующего устройства 4 выходного сигнала объекта 3, а также выходных сигналов задатчика 1 и интегросумматора 6/(N-1) и на другие входы интегросумматора 6/N, на выходе суммирующего усилителя 7 корректирующего устройства 4 образуется сигнал yт(N), пропорциональный сумме двух составляющих, т. е. yт(N) yп(N) + ϕ10. При этом составляющая ϕ10 как раз и служит для компенсации исходного аддитивного возмущения ϕ1 (.) в точке его приложения.
Другими словами, отработка аддитивного возмущения ϕ1 (.) в предложенной системе автоматического управления происходит за счет наличия в ней М=N-1 внутренних контуров регулирования с обратными связями по выходной управляемой величине и благодаря тому, что она содержит внутренний контур регулирования с параметрической обратной связью.
Наконец, еще более медленно в предложенной системе автоматического управления совершается отработка отклонения выходной управляемой величины от ее предписанного вторым управлением в системе [4] закона изменения. Это осуществляется во внешнем контуре регулирования системы автоматического управления в том случае, если нарушается равновесие между выходными сигналами объекта 3 и эталонной модели 8.
Таким образом, введение в систему автоматического управления нестационарным объектом эталонной модели, блока умножения, усилителя, трех инерционных фильтров, блока деления, трех суммирующих элементов, двух блоков выделения модуля, источника напряжения смещения и дифференцирующего блока позволяет сформировать сигнал ϕ20-1параметрической обратной связи, обратно пропорциональный исходному параметрическому возмущению ϕ2 (.), и компенсировать им указанное параметрическое возмущение. В свою очередь наличие в предложенной системе внутреннего контура регулирования с параметрической обратной связью позволяет осуществить компенсацию исходного аддитивного возмущения ϕ1 (.) за счет ее внутренних контуров регулировки по выходной управляемой величине, а также сформировать требуемый закон изменения управляемой величины за счет ее главной обратной связи, корректирующего устройства и эталонной модели.
Работоспособность предлагаемой системы автоматического управления нестационарным объектом проведена путем ее моделирования на ЭВМ. В результате моделирования установлено, что система автоматического управления обеспечивает заданную динамическую точность при управлении параметрически полностью неопределенными объектами. О параметри- ческой инвариантности предложенной системы можно судить к тому же и по ее уравнениям. В частности, из уравнений [3] и [4] видно, что параметры управляемого устройства системы не зависят от параметров ее объекта управления.
Кроме того, предлагаемая система автоматического управления проще для реализации и, следовательно, надежнее, чем прототип, так как вместо N требует всего лишь два канала формирования составляющих управляющего воздействия (см. фиг. 2): yт(N) и ϕ20-1.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| ЭЛЕКТРОПРИВОД С КООРДИНАТНО-ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2004 |
|
RU2261522C1 |
| ЭЛЕКТРОПРИВОД С УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2000 |
|
RU2181523C2 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся следящая система | 1988 |
|
SU1644089A1 |
Изобретение относится к системам автоматического управления нестационарными объектами. Система автоматического управления содержит задатчик, элемент сравнения, корректирующее устройство, выполненное в виде последовательно соединенных интегратора, M 1 интегросумматоров и суммирующего усилителя. Для обеспечения заданной динамической точности при управлении параметрически полностью неопределенными объектами она дополнительно содержит эталонную модель, блок умножения, усилитель, три инерционных фильтра, блок деления, три суммирующих усилителя, два блока выделения модуля входной величины, источник напряжения смещения и дифференцирующий фильтр, выполненный в виде последовательно соединенных N интегросумматоров и суммирующего усилителя. Это позволяет сформировать сигнал параметрической обратной связи, обратно пропорциональный исходному параметрическому возмущению, и компенсировать его. 2 ил.
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ N-го порядка, содержащая задатчик, элемент сравнения, который подключен одним входом к выходу объекта, выходом к входу корректирующего устройства, выполненного в виде последовательно соединенных интегратора, M 1 интегросумматоров и суммирующего усилителя, при этом вход интегратора и один из входов первых N - 1 интегросумматоров подсоединены к выходу элемента сравнения, другой вход последних N 1 интегросумматоров подключен к выходу суммирующего усилителя, отличающаяся тем, что в нее введены эталонная модель, блок умножения, усилитель, три инерционных фильтра, блок деления, три суммирующих элемента, два блока выделения модуля входной величины, источник напряжения смещения и дифференцирующий фильтр, выполненный в виде последовательно соединенных N интегросумматоров и суммирующего усилителя, причем задатчик подсоединен к третьему входу N-го интегросумматора корректирующего устройства и к входу эталонной модели, которая выходом подключена к другому входу элемента сравнения, блок умножения соединен одним входом с выходом суммирующего усилителя корректирующего устройства, другим входом с выходом блока деления, выходом через усилитель с входом объекта и через первый инерционный фильтр - с входом первого блока выделения модуля, подключенного выходом к одному из входов первого суммирующего элемента, который соединен другим входом с выходом источника напряжения смещения, выходом с одним из входов блока деления, второй суммирующий элемент подключен одним входом к задатчику, другим входом к выходу суммирующего усилителя корректирующего устройства, выходом через второй инерционный фильтр к одному из входов первого интегросумматора дифференцирующего фильтра, другой из входов всех интегросумматоров которого подсоединен через третий инерционный фильтр к выходу объекта, третий из входов интегросумматоров дифференцирующего фильтра соединен с выходом своего суммирующего усилителя, один из входов которого, третий вход последних M N интегросумматоров и один из входов суммирующего усилителя корректирующего устройства подключены к выходу объекта, третий суммирующий элемент подсоединен одним входом через второй блок выделения модуля к выходу суммирующего усилителя дифференцирующего фильтра, другим входом к выходу источника напряжения смещения, выходом к другому входу блока деления, а N ≅ M ≅ 2N 1.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
