(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРСЖАНИЯ ДИНАМИКИ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ 

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1981 |
|
SU1003115A1 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1979 |
|
SU883929A1 |
| Устройство для моделирования движения гусеничной машины | 2019 |
|
RU2711769C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2410756C1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 1999 |
|
RU2165646C1 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2396604C1 |
1
Изобретение относится к аналого- вычислительной технике и может быть использовано в тренажерах для обучения водителей гусеничных машин и исследовательских стендах.
Известно устройство для моделирования прямолинейного движения автомобиля в тренажерах, содержащее блок моделирования двигателя, выход которого подключен ко входу блока моделирования трансмиссии, другой вход которого подключен к датчику внешней нагрузки l.
Недостатком данного устройства является то, что оно не моделирует повороты и связанные с ними воздействия, влияющие на динамику движения машины.
Известно также устройство, содержащее последовательно соединенные блок моделирования двигателя, блок моделирования трансмиссии, выход которого соединен с первым вводом блокт моделирования гусеничного движителя, а его второй вход соединен с датчиком вида грунта 2.
Недостаток указанного устройства низкая точность моделирования поворотов и влияния их на динамику движения, так как в таком устройстве не учитывается кривизна траектории, фактически получаемая при выполнении поворотов, которая определяется разностью скоростей гусениц, а не углом поворота органов .управления поворотом. Кроме того,
,Q при определении величины сопротивления повороту не учитывается коэффициент сопротивления грунта повороту, а учитывается только сопротивление грунта прямолинейному движению. В данном устрой,5 стве не моделируется явление рекуперации мощности.
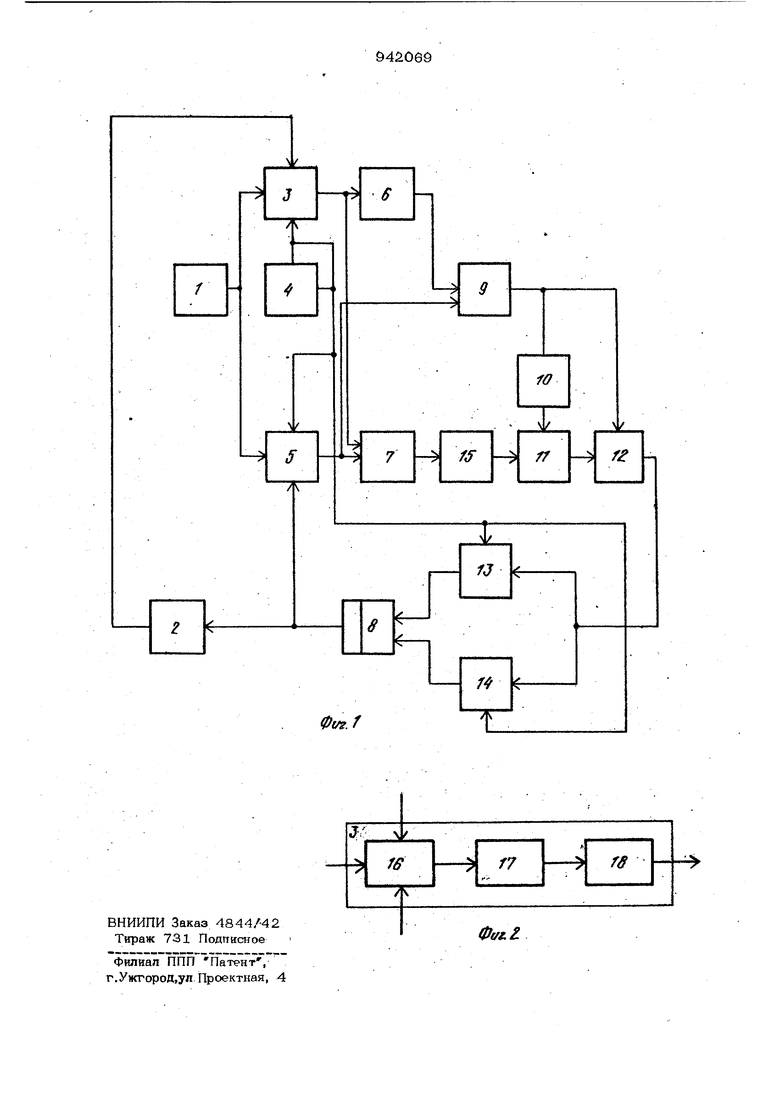
Наиболее близким к предлагаемому является устройство, содержащее поспеДJBaтeльнo соединенные блок модьлирова20 ния двигателя и блок моцелирования
трансмиссии, выход которого соединен с первыми входами первого и второгь блоков моделирования гусеничного движи-) теля, выходы подключены к первому и второму входам первого сумматора соответственно, вторые выходы первого и второго блоков моделирования гусеничного движителя соединены с выходом датчика напряжения, пропорциональ ного виду грунта, и с первыми входами первого и Второго функциональных преобразователей, вторые входы которых соединены между собой, а выходы соединены с первым и Вторым входами второ- гО сумматора соответственно, выход которого соединен с третьим входом второ го блока модел1фования гусеничного движителя, а через первый инвертор - с третьим входом первого блока моделирования гусеничного движителя, выход первого блока моделирования гусеничного движителя подключен через второй ин вертор к первому Входу третьего сумматора, второй вход которого соединен с выходом второго блока моделирования гу сеничного движителя, выход третьего сумматора подключен ко входу первого блока задания нелинейности и первому входу блока деления, второй вход блока деления соединен с выходом первого сум матора и первым входом компаратора, а выход подключен ко входу блока выделения модуля напряжения, выход которого через второй блок задания нелинейности соединен со вторым входом компаратора, выход первого блока задания нелинейности подключен к первым входам первого и второго функциональных преобразователей З. Недостаток известного устройства относительно низкая точность моделирова ния из-за допущения, принятого при создании модели -consi, где Vj , V - соответственно скорости левой и правой гусениц. Цель изобретения - повышение точнос ти моделирования устройства. Поставленная цель достигается тем, что в устройство для моделирования динамики движения гусеничной машины, содержащее датчик оборотов выходного вал выход которого соединен с первыми вход ми первого и Второго блоков моделирования гусеничного движителя, выходы подключены к первому и второму входам первого сумматора соответственно, вторые входы первого и второго блоков моделирования гусеничного движителя соединены с выходами датчика вида грунта и первыми входами первого и BTOpdix умножителей напряжения, вторые ВХОДЫ которых соединены между собой, а выходы подключены к первому и втором входам второго сумматора соответственно, выход которого соединен с третьим входом второго блока моделирования гусеничного движителя, а через первый инвертор - с третьим входом первого блока моделирования гусеничного движителя, выход первого блока; моделирования гусеничного движителя подключен через второй инвертор к первому входу третьего сумматора, второй вход которого соединен с выходом Второго блока моделирования гусеничного движителя, выход третьего сумматора подключен к первому входу блока деления, и первый блок выделения модуля напряжения, дополнительно введены второй блок выделения модуля напряжения и четвертый сумматор, причем выход первого сумматора соединен со Входом второго блока вьщеления модуля напряжения, выход которого подключен к первому входу четвертого сумматора, второй вход которого соединен с выходом первого блока выделения модуля напряжения, а Выход четвертого сумматора подключен ко второму входу блока деления, выход которого соединен с первыми входами первого и Второго умножителей напряжения, вход первого блока вьщеления модуля напр51жения подключен к выходу третьего сумматс а. На фиг. 1 изображена функциональная схема устройства; на фиг, 2 - схема блока моделирования гусеничного движителя. Устройство содержит датчик 1 оборотов вььходного вала, первый инвертор 2, первый блок 3 моделирования гусеничного .движителя, датчик 4 вида грунта, второй блок 5 моделирования гусеничного движителя, второй инвертор 6, первый 7, второй 8 и третий 9 сумматоры, первый блок 10 вьщеления модуля напряжения, четвертый сумматор 11, блок 12 деления, первый 13 и второй 14 умножители и второй блок 15 Выделения модуля напряжения. Блоки 3 и 5 моделирования гусеничного движителя идентичны и содержат сумматор 16, входы которого являются входами блока, делитель 17 напряжения и интегратор 18. Выход датчика 1 подключен к первым входам блоков 3 и 5 моделирования гусеничного движителя, вторые входы которых соединены с выходом датчика 4, выход блока 3 через инвертор 6 соединен со входом сумматора 9, выход которого соединен с первым входом блока 12 деления, выход которого одновременно соединен со входами умножителей напр$ркения 13 и 14, выходы которых соответственно соединены с первым и втфым входами сумматора 8, вьрсод сумматора 8 непосредственно и через инвертор 2 соединен соответственно с третьими входами блоков 5 и 3, выходы которых сое динены с первым и вторым входами сумматора 7, выход последнего через после довательно соединенные блок 10 бьщеления модуля напряжения на сумматор 11 подключен ко второму входу блока деления 12, а выход сумматора 9 через бло вьщеления модуля 10 подключен к друго му входу сумматора 11. Устройство работает следующим обрч зом. С выхода датчика 1 напряжение, пропорциональное оборотам выходного вала трансмиссии,, поступает на входы блоков 3 и 5, на выходе которых формируется напряжение, пропорциональное скорости движения соответствующего гусеничного движителя, Исходя из того, что скорость каждого гусеничного, движители зависит от величины сопротивления грунта прямолинейному движению, -на вторые входы блоков 3 и 5 моделирования гусеничного движителя подается на1ряжеНие с датчика 4, определяющее вид грунта, которое в блоках 3 и 5 преобразуется в величину момента сопротивления пря.. молинейному движению. На третьи входы блоков 3 и 5 подается напряжение, пропорциональное мо. менту, действующему на гусеничный движитель при повороте. Причем знак этого напряжения за счет инвертора 2 является разным для блоков моделирования гусеничного движителя. Это необходимо для того, чтобы- при повороте на забегающую гусеницу действовал тормозной момент, а на отстающую - раскручивающий. Формирование напряжения, гфопордио нального моменту, действующему на i тусеничный движитель при повороте, основано на рещеник зависимости 1гах с1Ч1н)Цув tl) где /xf - коэффициент сопротивления повсфоту; hicjx коэффициентсогфотивления повороту при . В, зависящий от вида грунта; а - коэффициент; 9 9 ,2, - радиус поворота по забегающей гусенице; Ь - расстояние между центрами гусениц. С учетом, что о -0+J (V- аи. Vn -1 л I ч - - 2. - угловая скорость мащины; где UL - соответственно скорости левой V2,V и правой гусениц; R - радиус поворота центра мршины, вьгражение (l) преобразуется к виду 2.ч;В Цп10К )l«B4l- j)(.li.V) Это выражение рещается следующим бразом. С выхода блоков 3 и 5 моделирования усеничного движителя напряжения Оу Uvi поступают на третий cytJiMaTOp 7, а котором-они складываются с учетом оэффициента (1-а). Далее это нагфяжеие поступает.на блок 5 вьзделения моуля, где на1фяжение приводится к одному знаку независимо от полярности наряжений и у и и у. . Напряжение ) пропорциональное угловой скорости поворота машины, определяется из вьфажения которое рещается с помощью инвертора 6 и сумматора 9. Напряжение поступает на вход блока Ю выделения модуля на15)яжения, с помощью которого оно приводится к одному знаку с учетом коэффициентов (1-а) В. Далее напряжение с выходов блоков 15 и Ю складываются с помощью четвертого сумматора 11, на выходе которого форМ1фуется напряжение, пропорциональное величине знаменателя в вьфаженин (2). Последнее поступает на первый вход блока 12 деления, на другой вход которого подается напряжение iv с учетом коэффициентов 2В. На выходе блока 12 фсрм1фуется нахфяжение 0 при Wj 1. Учет эида грунта при формировании и/, осуществляется с помощью умножителей 13 и .14, которые учитывают величину п для различных грунтов. Величина момента сопротивления повороту определяется выражением М 4 где Q - вес машины; Ь - длина оперной поверхности, т.е. величина для данной машины постоянна и учитывается с помощью сумматора 8. Таким образом, предлагаемое устройство позволяет моделировать повороты без допущений, принятых в прототипе, что позволяет повысить точность моделирования динамики гусеничных машин. Формула изобретения Устройство для модел|фования динами ки движения гусеничной машины, содержащее датчик оборотов выходного вала, выход которого соединен с первыми входами первого и второго блоков моделирования гусеничного движителя, выходы которых подключены к первому и вто рому входам первого сумматора соответственно, вторые входы первого и второго блоков моделирования гусеничного движ1гселя соединены с выходом датчика вида грунта и первыми входами первого и второго умножителей, втсрые входы которых соединены между собой, а выходы подключены к первому и второму вхо дам второго сумматора, выход которого соединен с третьим входом второго блока моделирования гусеничного движителя, а через первый инвертор - с третьим ВХ.ОДОМ первого блока моделирования гусеничного движителя, выход первого блока моделирования гусеничного движителя подлчлючен через второй инвертор к первому входу третьего сумматора, второй вход которого соединен с вькодом второго блока модел{фования гусеничного дви-. жителя, выход третьего сумматора под.- ключен к первому входу блока деления, и первый блок вьщеления модуля напряжения, отличающее.с я тем, что, с целью повышения точности моделирования, оно содержит второй блок выделения модуля напряжения и четвертый сумматор, 1Ч)ичем выход первого сумматора соединен со входом второго блока Выделения модуля на1фяжения, .выход которого подключен к первому входу четвертого сумматора, второй вход которого соединен с выходом бло4гка Вьщеления модуля напряжения, а выход четвертого сумматора подключен ко Второму входу блока деления, выход которого соединен с первыми входами первого и второго умножителэй напряжения, вход первого блока выделения модуля напряжения подключен к выходу третьего сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 486.333, кл. Q 06 Q 7/70, 1972, 2.Техническое описание изделия ТТВ-1/765, 53.ОО.ОО.ОО.ОО.ООО. 3.Авторское свидетельство СССР по заявке NC 296Д.349/18-24, кл. О Об G 7/70, 1980 (прототип).
