Изобретение относится к аналоговой вычислительной технике и может найти применение в тренажерах для подготовки водителей гусеничных маиин.
Известно устройство для моделирования динамики движения гусеничной машины, содержащее первый и второй инверторы, первый, второй и третий интеграторы, причем вход третьего интегратора соединен с входом первого интегратора fll.
Наиболее близким по технической сущности к изобретению является устройство для моделирования динамики движения гусеничной машины, содержащее последовательно соединенные блок моделирования двигателя,блок моделирования трансмиссии,первый блок моделирования гусеничного движителя,второй, инвертор, третий сумматор, первый блок задания нелинейности, первый функциональный преобразователь, второй сумматор, второй вход которого через второй функциональный преобразователь подключен к выходу первого блока задания нелинейности,/и первый инвертор, выход которого соединен с вторым, входом первого блока моделирования гусеничного движителя, последовательно соединенные второй блок
моделирования гусеничного двигателя, первый сумматор, блок деления, блок выделения модуля напряжения, второй блок задания нелинейности и схему сравнения, второй вход которой соединен с выходом первого сумматора,второй вход которого подключен к выходу первого блока моделирования гусеничного движителя, второй вход третьего
10 сумматора соединен с выходом второго блока моделирования гусеничного дви жителя, первый вход которого подключен к выходу блока моделирования трансмиссии, а второй вход - к вы15ходу второго сумматора, выходы датчика вида грунта подключены соответственно к третьим входам первого, BTO-I рого блоков модулирования гусеничных движителей и вторым входам функцио20нальных преобразователей
Недостатком указанных устройств является то, что они не моделируют поворот гус-еничной машины.
Цель устройства расширение функ25циональных возможностей за счет моделирования поворота гусеничной машины.
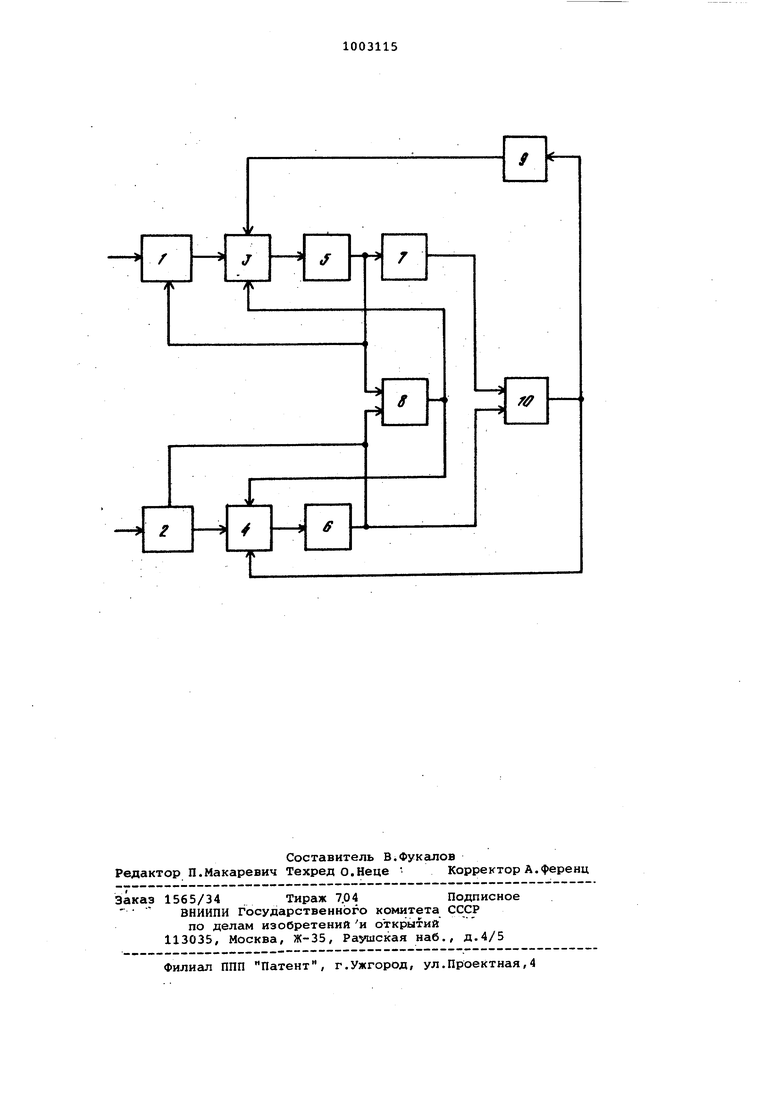
Поставленная цель достигается тем, что, в устройство для моделиро30 вания динамики движения гусеничной машины, содержащее четыре интегратора, два сумматора и два инвертора первые входы первого и второго интеграторов являются соответствующим входами устройства, а их выходы подключены к первым входам первого. и второго сумматоров соответственно вторые входы которых соединены с вы ходами третьего интегратора, выход первого инвертора подключен к первому входу четвертого интегратора, .выход которого соединен с третьим (ВХОДОМ второго сумматора через вто,р6й инвертор, дополнительно введены пятый и шестой интеграторы, входы к торых подключены к выходам первого и второго сумматоров соответственно выход пятого интегратора соединен с вторым входом, первого интегратора, входом первого инвертора и первым входом третьего интегратора,- второй вход которого подключен к выходу шестого интегратора и вторым входам второго и четвертого интеграторов. На чертеже приведена схема устрой ства. Устройство содержит первый 1, вто рой 2 интеграторы, первый 3, второй 4, сумматоры, пятый 5, шестой б интеграторы, первый инвертор 7, третий интегратор 8, второй инвертор 9 и четвертый интегратор 10. Интегратор 1 через последовательн соединенные сумматор 3, интегратор 5 и инвертор 7 соединен с первым входо интегратора 10, выход которого непос редственно и через инвертор 9 соединен соответственно с третьими входами сумматоров 4 и 3. Интегратор 2 через последовательн соединенные сумматор 4 и интегратор 5 соединен с вторьвл входом интегратора 2 и с вторыми входс1ми интеграторов 8 и 10. Выход интегратора 8 соединен с вторыми входами сумматоро 3 и 4. Влход интегратора 5 соединен с BTOpbiM входом интегратора 1 и первым входом интегратора 8. Устройство работает следующим образом. Если на первые входы интеграторов 1 и 2 подать равные по знаку и величине, например, положительные напряжения UM и (1м,, пропорциональные крутящему моменту, приложенному к право-Г му и левому ведущим колесам гусениц, то на выходе интеграторов 1 и 2 появятся отрицательные напряжения Uv и , пропорциональные линейной ско рости движения гусениц. Напряжения Uv и Uvnпоступают на первые входы сумматоров 3 и 4,с помощью которых осуществляется суммирование следующих величин:„ -U, -ьа, t-1-U.., (1J .на сумматоре 3 на сумматоре 4 -U.. +U.. . -v , напряжения, пропоргдециональные линейным скоростям правой (левой ) гусениц; - напряжение, пропорциональное линейной скорости машины/ ( - напряжение, пропор циональное угловой скорости поворота . машины (знак этого напряжения определяется напряжением поворота); |Ъ - расстояние между центрами правой и левой гусениц. Напряжения на выходах сумматоров 3 и 5 будут положительными, так как в процессе разгона Uy и„ и Ц. а, , U... 0. « 2 м Указанные суммы интегрируются с помощью интеграторов 5 и 6, в результате чего формируются напряжения -U- и - Uj , пропорциональные величине усилия, развиваемого в рабочей ветви правой и левой гусениц. Постоянные времени интеграторов 5 и 6 пропорциональны линейной податливости рабочих ветвей гусениц. Напряжения -UT и-0-j - поступают на входы интеграторов 1,2 и 8. На входы интеграторов 1 и 2 эти напряжения поступают с учетом коэффициента, пропорционального радиусу ведущего колеса и противоположным знаком напряжения fn И Т-б- противодействуют разгону, в результате чего моделируются затраты энергии на разгон машины. Напряжения -t/i- и U также поступают на первый и второй входы интегратора 8, для которого эти напряжения будут пропорциональными силами приводящими машину в движение. В качестве допущения считается,что буксование гусеницы с грунтом отсутствует. В результате на выходе интегратора 8 появится напряжение пропорциональное прямолинейной скорости движения машины. Это напряжение поступает на соответствующие входы сумматоров 3 и 4, в результате чего происходит уменьшение упругой деформации рабочих вет&ёй гусениц. Кроме того, напряжение -Uf через инвертор 7, а напряжение -UTg непосредственно поступают на входы интегратора 10. Так как на входа;Х интегратора 8 они равны, но противоположны по знаку за счет инвертора 7, то эти напряжения не приводят к изменению напряжения Unj на выходе интегратора 8. Если в качестве начальных условий принять ( О, то будет сохраняться прямолинейное движение. В этом случае третьи слагаемые выражения (1) и (21 будут равны нулю. Сл довательно, -Uy -Uy/o т-е. моделируется прямолинейное движение гусе ничной машины с мгновенной скоростью VM W . Если в какой-то момент времени t, равный -tjj, изменить напряжение например, до нуля, то в этом случае напряжение на другом интеграторе 8 начнет уменьшаться. В результате этого напряжение на выходе сумматора 4 сменит знак на противоположный, так как до момента времени to(Uy)преобладало над значением напряжения (Uv,) . После того как -Uv- стало уменьшаться, -U стало меньше -v - Вследствие интегрирова ния указанной суммы напряжение выходе интегратора 5 начинает уменьшаться, а при определенных условиях может сменить знак на противопо ложный (указанные условия определяютс соотношением постоянных времени интеграторов, входящих в состав устро отва 1. Так как - U-f - U-jo , то разность входах интегратора 10 входах интегратсЗра 10 (Jf -( 0, что вызывает заряд интегратор 10, что вызывает заряд причем его выходное напряжение Ош., будет положительный полярности, и через инвертор 9 поступает на вход сумматора 3 и непосредственно на вход сумматора 4. За счет инвертора 9 напряжения U(xr|u и ( в данном случае отрицательные, Совпадают по знаку, что вы зывает увеличение положительного напряжения на выходе сумматора 3 и, как следствие, увеличение -Uj на выходе интегратора 5. С другой стороны, напряжение U уменьшает напр жение на выходе сумматора 4, и, к.ак следствие, уменьшает напряжение-0x2 т.е. производится уменьшение разнос ти на входах интегратора 10 ( 0, что замедляет заряд последнего. Так как постоянная времени интегратора 10 пропорциональна моменту ине дни массы машины в повороте, то устройство моделирует влияние момен та инерции массы машины в повороте на величину угловой скорости. Это соответствует регшьным условиям, так как для того, чтобы ввести машину в поворот, необходимо затратит дополнительную силу, характеризуему поворачивающим моментом. рри снятии поворачивающего момен та машина сама выходит из поворота, чт моделируется следующим образом. Если вновь на вход интегратора 1 подать напряжение то нап ряжение Uv на выходе интегратора 1 начнет увеличиваться, уменьшая при этом напряжение -U , а на выходе интегратора 5 напряжение также начнет увеличиваться. Таким образом, устройство позволяет моделировать поворот гусеничной машины, причем учитывая при этом момент инерции массы машины в повороте, что особенно важно для правильности воспроизведения переходных процессов при входе машины в поворот и выходе из него. Применение предлагаемого устройства в тренажере позволит более качественно воспроизводить динамику движения гусеничной машины, а следовательно, и повысить качество обучения водителей гусеничных машин. Формула изобретения Устройство для моделирования динамики движения гусеничной машины, содержащее четыре интегратора,два сумматора и два инвертора,первые входы первого и второго интеграторов являются соответствующими входами устройства, а их выходы подключены к первым входам первого и второго сумматоров соответственно, вторые входы которых соединены с выходом третьего интегратора, выход первого инвертора подключен к первому входу четвертого интегратора, выход которого соединен с третьим входом второго cVMMaтора непосредственно, а с третьим входом первого сумматора через второй инвертор, отличающе,е с я тем, .что, с целью расширения .функциональных возможностей за счет моделирования поворота гусеничной машины, оно дополнительно содержит пятый и шестой интеграторы, входы которых подключены к выходам первого и второго сумматоров соответственно, выход пятого интегратора соединен с вторым входом первого интегратора, входом первого инвертора,и первым входом третьего интегратора,второй вход которого подключен к выходу интегратора и вторым входам второго и четвертого интеграторов. интеграторов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 851426, кл. G, 06 G, 7/70, 1979. 2.Авторское свидетельство СССР по заявке № 2837236, кл. G 06 G, 7/70, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1982 |
|
SU1083207A2 |
| Устройство для моделирования колебаний гусеничных машин | 1980 |
|
SU959097A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1979 |
|
SU883929A1 |
| Устройство для моделированияКОлЕбАНий гуСЕНичНыХ МАшиН | 1979 |
|
SU842865A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU907560A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU942069A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU972530A2 |
| ДИНАМИЧЕСКИЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2009 |
|
RU2396604C1 |