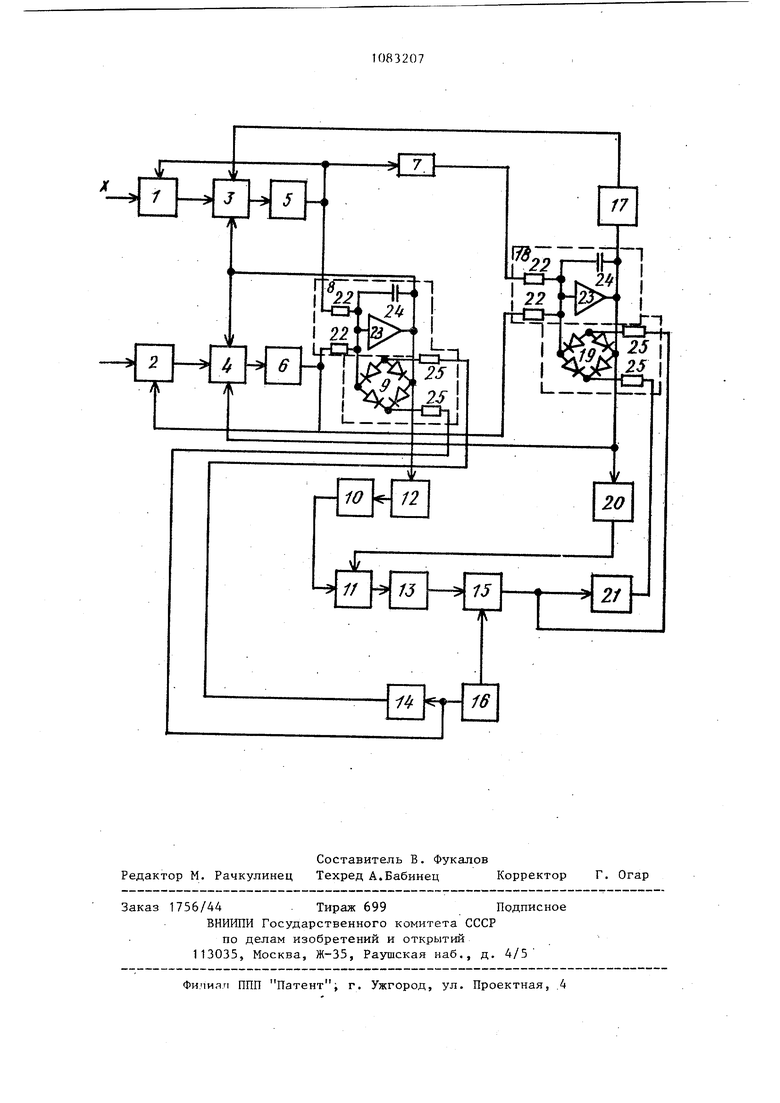
Изобретение относится к аналоговой вычислительной технике и может найти применение в тренажерах для подготовки мexaникoв-вoдитeJ eй гусеничных машин. По основному авт. св. № 1003115 известно устройство для моделирования динамики движения гусеничной машины, содержащее четырех интегратора, два сумматора и два инвертора первые входы первого и второго интеграторов являются соответствующими входами устройства и их выходы подключены к первым входам первого и второго сумматоровсоответственно вторые входы которых соединены с выходом третьего интегратора, выход первого инвертора подключен к первому входу четвертого интегратора, выход которого соединен с треть им входом второго сумматора непосредственно, а с третьим входом пер вого сумматора через второй инверто пятый и шестой интеграторы, входы которых подключены к выходам первого и второго сумматоров соответственно, выход пятого интегратора сое динен с вторым входом первого интегратора, входом первого интегратора и первым входом третьего интегратора, второй вход которого подключен к выходу шестого интегратора и вторым входом второго и четвертого интеграторов. Недостатком данного устройства является то, что в нем не учитьгеают ся характеристики грунта и их взаим связь с динамикой движения при прям линейном движении и повороте, т.е. не моделируется взаимодействие гусеничной машины с грунтом. Цель изобретения - расширение функциональных возможностей за счет моделирования взаимодействия гусеничной машины с грунтом. Указанная цель достигается тем, что в устройство для моделирования динамики движения гусеничной машины дополнительно введены датчик напряжения, пропорционального виду грунта, два мостовых вьшрямителя, ограничительные резисторы, третий инвер тор, последовательно соединенные первый блок выделения модуля напряжения, первый блок умножения, блок воспроизведения нелинейности типа экспонента, второй блок умножения и четвертый инвертор, последователь но соединенные второй блок выделения модуля напряжения и блок деления, причем выход блока деления соединен с другим входом первого блока умножения, первый выход датчика напряжения, пропорционального виду грунта, подключен к входу третьего инвертора, вход и выход которого через соответствующие ограничительные резисторы подключены к одной паре вершин первого мостового выпрямителя, другая пара вершин которого подключена к входу и выходу третьего интегратора соответственно, одна пара вершин второго мостового выпрямителя соединена соответственно с входом и выходом четвертого интегратора, выход которого подключен к входу первого блока выделения модуля напряжения, другая пара вершин второго мостового выпрямителя через соответствующие ограничительные резисторы соединена с входом и выходом четвертого инвертора, второй выход датчика напряжения, пропорционального виду грунта, соединен с другим входом второго блока умножения. На чертеже приведена схема йредлагаемого устройства. Устройство содержит первьш 1 и второй 2 интеграторы, первый 3 и второй 4 сумматоры, пятьм 5 и шестой 6 интеграторы, первый инвертор 7, третий интегратор 8, первый мостовой выпрямитель 9, блок 10 деления, первый блок 11 умножения, второй блок 12 выделения модуля напряжения, блок 13 воспроизведения нелинейности типа экспонента, третий инвертор 14, второй блок 15 управления, датчик 16 напряжения, пропорционального виду грунта, второй инвертор 17, четвертый интегратор 18, второй мостовой выпрямитель 19, первый блок 20 выделения модуля напряжения четвертый инвертор 21, резисторы 22, операционные усилители 23, конденсаторы 24 и ограничительные резисторы 25. Устройство работает следующим обазом. Если на первые входы интегратоов 1 и 2 подать равные по знаку и еличине, например, положительные наряжения Hf и ид,2 пропорциональые крутящему моменту, приложенному правому и левому ведущим колесам гусениц, то на выходе интеграторов 1 и 2 появятся отрицательные напряжения Uy и и , пропорциональные линейной скорости движения гусениц. Напряжения Uy, и Uy поступают на первые входы сумматоров 3 и 4, с помощью которых осуществляется суммирование следующих величин на сумматоре 3 ,+В/2« на сумматоре 4 Uy+U ±B/2-U((2 где Uy. и - напряжения, пропорциональные линейным скоростям правой (левой) гусеницы; Uy - напряжение, пропорциональное линейной скорости машин; («1М напряжение, пропорциональное угловой скорости поворота машины (знак этого напряжения определя ется направлением поворота); В - расстояние между центрами правой и левой гусениц. Напряжения на выходах сумматоров 3 и 4 будут положительными, так как в процессе разгона lUv hlUvMUlUvih luvwl; , 0. Указанные суммы интегрируются с помощью интеграторов 5 и 6, в результате чего формируются напряжени -и. и -и , пропорциональные вели чине усилия, развиваемого в рабочей ветви правой и левой гусениц. Постоянные времени интеграторов 5 и 6 пропорциональны линейной податливости рабочих ветвей гусениц. Напряжения -Uj, и -UTJ поступают на входы интеграторов 1, 2 и 8. На входы интеграторов 1 и 2 эти напряжения поступают с учетом коэффициента, пропорционального радиусу ведущего колеса, и имеют знак, противоположньй знаку напряжений U. и , т.е. противодействуют разгону В результате этого моделируются затраты энергии на разгон машины. Напряжения U-y и также посту пают на первый и второй входы интегратора 8, для которого они.являются пропорциональными силами, привод щими машину в движение. В качестве допущения считается, что буксование гусениц с грунтом отсутструет. В результате на выходе интегратора 8 появляется напряжение , пропорциональное прямолинейной скорости движения машины. Это напряжение поступает на соответствующие входы сумматоров 3 и 4, в результате чего происходит уменьшение упругой деформации рабочих ветвей гусениц. Кроме того, напряжение -и через инвертор 7, а напряжение -и, непосредственно поступают на входы интегратора 18. А так как на входах интегратора 18 они равны, противоположны по знаку за счет инвертора 7, то эти напряжения не приводят к изменению напряжения U на выходе интегратора 18. Если в качестве начальных условий принять U О, . то будет сохраняться прямолинейное движение. В этом случае третьи слагаемые выражения (1) и (2) будут рйвны нулю. Следовательно -Uy М2 т.е. моделируется прямолинейное движение гусеничной машины с мгновенной скоростью V|(t) . Если в какой-то момент времени t изменить напряжение U/, например, до нуля, то в этом случае напряжение на выходе интегратора 1 начнет уменьшаться. В резутьтате этого напряжение на выходе сумматора 3 сменит знак на противоположньй, так как до этого момента времени преобладало над значением напряжения fUvMiПосле того, как -Uy стало уменьшаться, -Uy стало меньше Uy. Вследствие интегрирования указанной суммы напряжение -U на выходе интегратора 5 начинает уменьшаться, а при определенных условиях может сменить знак , на противоположный (указанные условия определяются соотношением постоянных времени интеграторов, входяших в состав устройства). Так как -U с -П-р, то разность на входах интегратора 18 U-j- - U-,-,;0, что вызывает заряд этого интегратора 18, причем его выходное напряжение Ujjj положительной полярности через инвертор 17 поступает на вход сумматора 3 и непосредственно на вход сумматора 4. За счет инвертора 17 напряжения Uv в данном случае отрицательные и совпадают по знаку, что вызывает увеличение положительного напряжения на выходе сумматора 3 и, следовательно увеличение -U, на выходе интегратора 5. С другой стороны, напряжение Uy уменьшает напряжение на выходе сумматора 4 и, след вательно напряжения , т.е. производится уменьшение разности на входах интеграторов 18 11,- - U, ЧТО замедляет заряд последнего. Так как постоянная времени интегратора 18 пропорциональна моменту инерции массы машины в повороте, то устройство моделирует влияние момента инерции массы машины, в повороте на величину угловой скорости. Это соот ветствует реальным условиям, так ка для того, чтобы ввести машину в поворот, необходимо затратить дополнительную силу, характеризующуюся поворачивающим моментом. При снятии поворачивающего момента машина сама выходит из поворота, что моделируется следующим образом. Если вновь на вход интегратора 1 подать напряжение U N(it пряжение Uy на выходеинтегратора Iначнет увеличиваться, уменьшая пр этом напряжение -U, а на выходе интегратора 5 напряжение также начнет увеличиваться. При взаимодействии гусениц с грунтом при наличии угловой скорости машины возникает момент сопротивления повороту, которьй противодействует последнему. Формирование момента сопротивления повороту осуществляется следующим образом. Напряжения и Uy с выходов интеграторов 8 и 18 поступают на блоки 12 и 20 выделения модуля, на выходе которых появляются напряжени иу1ц|и |U( . Напряжение |и,д,), пр порциональное V, поступает на блок 10 деления, которьй предназначен для получения напряжения , про порционального t/Vx. Напряжение помощью блока IIумножения умножается на напряжение Uy, в результате чего на выходе блока 11 формируется напряжение, пр порциональное кривизне поворота машины Ut5, Это напряжение поступает на блок 13 воспроизведения нелинейности, который реализует зависимост М f(k), где MC - момент сопротивления повороту. Эта зависимость описьгоается экспонеитон. ia выходе блока 13 формируется напряжение, пропорциональное моменту сопротивления повороту ,, которое умножается с помощью блока 15 умножения на напряжение, пропорциональное коэффициенту сопротивления повороту ш .gjj и характеризующее качество грунта. Это напряжение снимается с датчика 16. вида грунта, представляющего собой, например, переключатель, на выходе которого формируется значение напряжения Ue в зависимости от положения переключателя. Далее напряжение с выхода блока 15 умножения с помощью инвертора 21 преобразуется в двухполярное напряжение, которое поступает на соответствующие вершины мостового выпрямителя 19, служащего для предотвращения появления напряжения U от напряжения, пропорционального моменту сопротивления. Напряжение, пропорциональное силе сопротивления прямолинейному движению, снимаемое с выхода датчика вида грунта, с помощью инвертора 14 преобразуется в двухполярное и поступает на соответствующие вершины мостового выпрямителя 9, служащего для предотвращения появления напряжения напряжения, пропорционального силе сопротивления прямолинейному движению. Таким образом, устройство позволяет моделировать динамику движения гусеничной машины при взаимодействии ее с грунтом, причем параметры грунта могут задаваться с помощью датчика грунта. Применение предлагаемого устройства в тренажерах позволяет воспроизводить движение гусеничной машины в различных дорожных условиях, свою очередь, дает возможность повысить качество обучения водителей гусеничных машин. Кроме того, применение предлагаемого устройства в исследовательских стендах позволяет оценить управляемость гусеничной машины на этапе проектирования, что приведет к более качественной разработке гусеничных машин.
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИКИ ДВИЖЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ по авт. св. № 1003115, отличающееся тем, что, с целью расширения функциональных возможностей путем воспроизведения взаимодействия гусеничной машины с грунтом, оно дополнительно содержит датчик напряжения, пропорционального виду грунта, два мостовых выпрямителя, ограничительные резисторы, третий инвертор, последовательно соединенные первый блок вьщеления модуля напряжения, первый блок умножения, блок воспроизведения нелинейности типа экспонента, второй блок умножения и четвертый инвертор, последовательно соединенные второй блок .выделения модуля напряжения и блок деления, причем выход блока. деления соединен с другим входом первого блока умножения, первый выход датчика напряжения, пропорционал ного виду грунта, подключен к входу третьего инвертора, вход и выход которого через соответствующие ограничительные резисторы подключены к одной паре вершин первого мостового выпрямителя, другая пара вершин которого подключена к входу и выходу третьего интегратора соответственно, одна пара вершин второго мостового выпрямителя соединена соответственно с входом и выходом четвертого интегратора, выход которого подключен к входу первого (/) блока вьщеления модуля напряжения, другая пара вершин второго мостового выпрямителя через соответствующие ограничительные резисторы роединена с входом и выходом четвертого инвертора, второй выход датчика напряжения, пропорционального виду грунта, соединен с другим входом второго блока умножения.