Существующие конструкции подъема ходового оборудования и поворотных устройств не обеспечивают необходимой устойчивости кранов при подъеме груза. В предлагаемой конструкции поворотного CTpeviOBOго крана с щагающим ходовым оборудованием этот недостаток устранен.
Кран в рабочем состоянии опирается непосредственно опорной плитой, а в транспортном положении он поднимается вместе с опорной плитой и, через тележку, опирается на опорную раму ходового оборудования. Опорная рама ходового оборудования и опорная плита подъем Ю-поворотного устройства крана связаны между собой канатным полиспастом, с помощью которого осуществляется взаимное вертикальное перемещение опор. Перемещение крана в горизонтальном направлении производится щаганием.
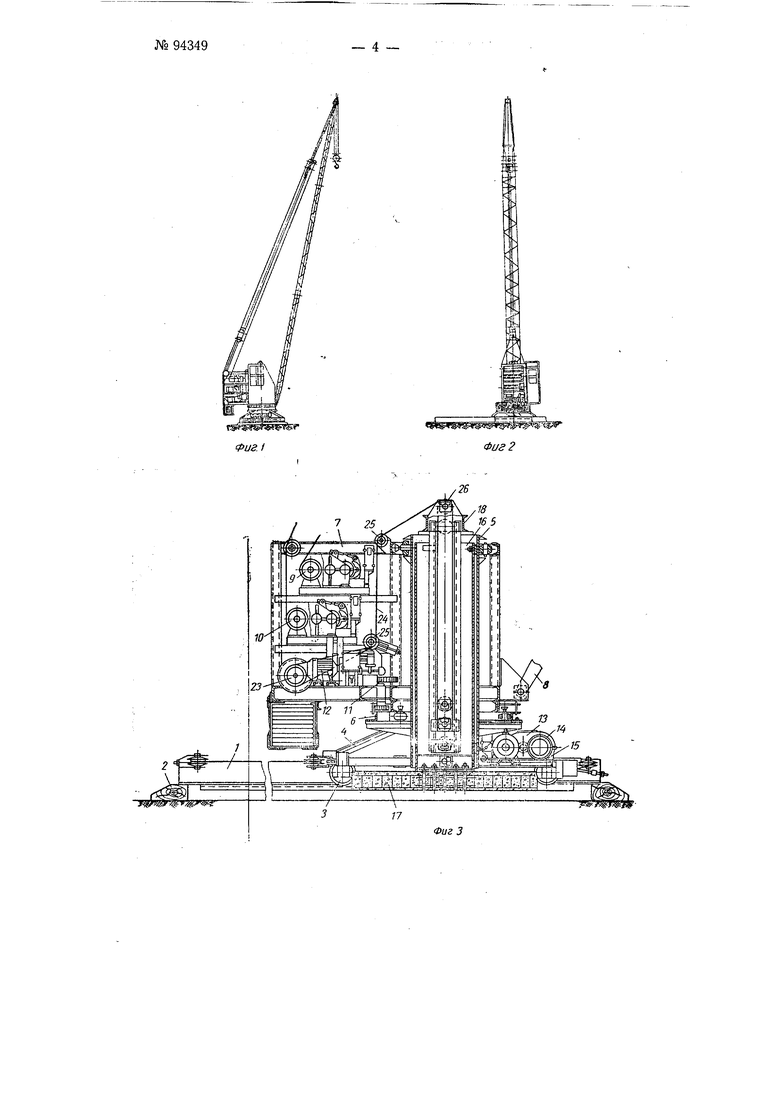
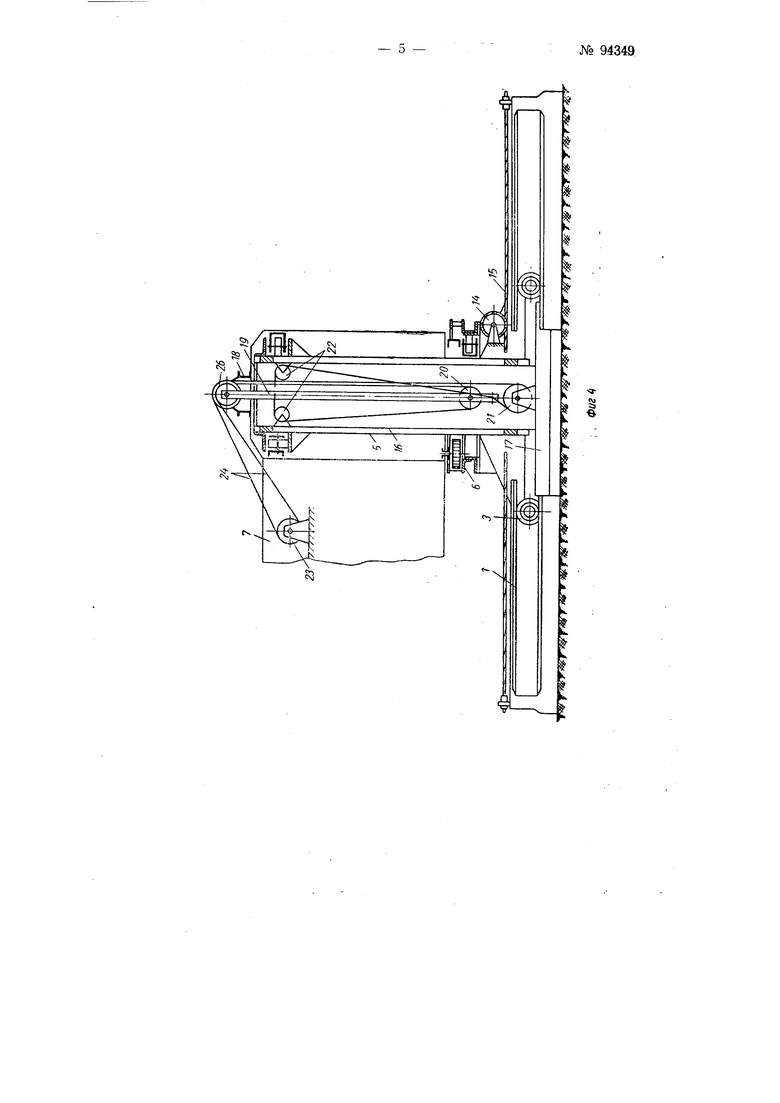
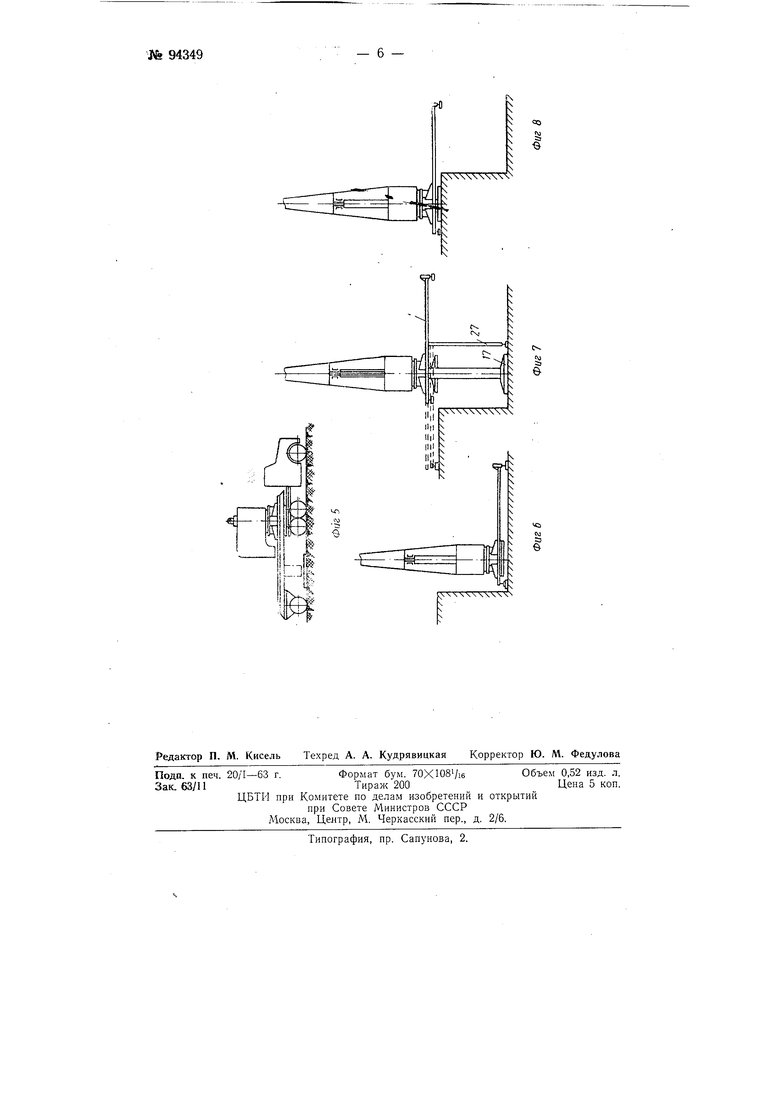
На фиг. 1 и 2 изображен общ,нй вид крана в двух проекциях; на фиг. 3 - вертикальный продольный разрез крана; на фиг. 4 - опорноподъемное оборудование при опирании крапа на опорную раму; па фиг. 5 - схема самопогрузки крана на автомобиль с прицепом; на фиг. 6, 7 и 8 - схемы самоподъема крана на возводимое здание.
Кран состоит из опорной рамы / (фиг. 3) с деревянными опор)ыми брусьями 2. Элементы опорной рамы имеют коробчатое сечение, по которым на колесах 3 перемещается тележка 4 крана с укрепленной в ней опорной трубой 5 и опорно-поворотным кругом 6, на которые опирается поворотная часть 7 крана со стрелой 8.
На поворотной части крана размещаются механизмы: подъема груза Я изменения вылета стрелы 10, вращения поворотной части 11 и механизм 12 вертикального пере1мещен1 я опорной плиты.
Механизм J3 горизонтального перемещения опорной рамы размещается на тележке 4 крана, которая может перемещаться путем вращения барабана 14, на который намотан канат 15, свободным концом прикрепленный к опорной раме /.
№ 94349
Внутри опорной трубы 5 размещается труба 16 с прикрепленной к ней массивной опорной базой-плитой 17.
Поворотная часть крана имеет поперечину 18 с подвешенным к ней элементом 19 (фиг. 4) с канатным блоком 20, укрепленным на нижнем конце его.
В трубе 16 укреплены также канатные блоки 21 внизу и 22 вверху. Барабан 23 механизма 12 вертикального перемещения опорной базы охватывается несколькими витками каната 24, обе ветки которого огибают отводные блоки 25 (фиг. 3), верхние блоки 26 у поперечины 18 и идут одна на блок 21 (фиг. 4) трубы опорной плиты, а вторая на блок 20 элемента 19 и блоки 22 трубы опорной плиты. Оба конца каната 24 сходятся вместе и крепятся к элементу 19. При такой схеме образуются два взаимосвязанных между собой полиспаста: один между концом элемента 19 и низом трубы 16, второй между концом элемента 19 и верхом трубы 16, обеспечивающих возможность перемещения опорной плиты 17 и трубы 16 с краном относительно трубы 5 и опорной рамы с тележкой.
При вращении барабана 23 в одном направлении, будет происходить подъем крана относительно опорной плиты 17; при вращении барабана 23 в обратном направлении, будет происходить опускание крана относительно опорной плиты 17, переходящее при касании опорной рамой грунта в подъем опорной плиты относительно опорной рамы.
Для перемещения крана на новое место работы используют совместно механизм 12 вертикального перемещения опорной плиты и механизм 13 горизонтального перемещения опорной рамы.
Кран поднимается на опорной плите 17, опорная рама / механизмом 13 перемещается в крайнее положение относительно крана, катясь по колесам 3 тележки 4 крана. Затем опорная рама / опускается механизмом 12 на грунт, а опорная плита 17 приподнимается,, тележка 4 крана перемещается вдоль опорной рамы / механизмом 13 в крайнее положение, и кран вновь поднимается на опорной плите 17.
Такими передвижками (шаганием) осуществляется перемещение крана в горизонтальном направлении.
При опирании крана на грунт опорной рамой /, поворотная часть 7 крана совместно с трубой 16 и опорной плитой /7 механизмом // вращается относительно трубы 5.
При опирании крана на грунт опорной плитой 17, опорная рама / совместно с тележкой 4 крана и трубой 5 вращается механизмом И относительно опорной плиты 17 и трубы 16, что обеспечивает возможность перемещения крана в необходимом направленни.
Для обеспечения передвижки крана, электродвигатели механизмов вертикального перемещения 12 опорной плиты и горизонтальиого перемещения 13 опорной рамы сблокированы между собой при помощи выключателей.
Наличие в кране взаимно перемещающихся в вертикальном направлении опорной рамы и опорной плиты обеспечивает возможность осуществлять самопогрузку крана на транспортные средства, а также самоподъем крана с этажа на этаж возводимого здания.
Для самопогрузки крана на автомобиль (фиг. 5), кран поднимается на опорной плите 17, а под опорную раму / подводится автомашина с прицепом; погрузка крана осуществляется опусканием опорной рамы / на автомашину с последующим подъемом опорной плиты.
Для самоподъема крана по строящегося здания (фиг. 6-8), кран устанавливается возле стены очередного этажа (фиг. 6) и поднимается на опорную плиту (фиг. 7), после чего опорная рама перемевдается в крайнее верхнее положение. Под опорную раму подводится опорная стойка 27, кран перемещается по раме / на стену здания и устанавливается на опорной плите /7 для работы, а опорная стойка 27 убирается (фиг. 8).
Предмет изобретения
1.Шагающий стреловой поворотный кран с ходовым устройством, заключающим в себе переменно-опирающиеся на грунт в процессе передвижения продольно-подвижную при помощи лебедки и канатной передачи опорную раму и вертикально-подвижные элементы, отличающийся тем, что, с целью нозышения устойчивости и маневренности крана, опорная рама связана с неповоротной частью рана, а в качестве вертика.тьно-подвижного элемента применена расположенная по оси вращения крана и связанная с колонной поворотной части при помощи канатных полиспастов опорная база (плита).
2.Форма выполнения крана по п. 1, отличающаяся тем, что, с целью .возможности вертикального перемещения опорной базы (плиты) относительно опорной рамы и опорной рамы относительно опорной базы (плиты), применены два взаимосвязанных противоположно действующих канатных полиспаста, концевые ветки канатов которых наматываются на барабан лебедки в противоположных направлениях.
3.Форма выполнения крана но пи. 1 н 2, отличающаяся тем, что, с целью обеспечения автоматизации процесса его передвижения, электродвигатели механизмов продольного передвижения опорной рамы и вертикальиого перемещения опорной базы (плиты) сблокированы при помощи концевых выключателей.
4.Способ погрузки крана по пп. 1-3 на автомобиль при перевозке его на дальнее расстояние, отличающийся тем, что кран вывевдивают на опорной базе (плите) с последующим заводом под опорную раму с двух сторон автомобиля и ирицена.
5.Способ вертикального перемещения крана по пп, 1-3 с этажа на этаж строящегося здания, отличающийся тем, что кран вывещивают на опорной базе (плите) с последующим перемещением опорной рамы и опиранием одной стороной ее на высщий этаж, а второй стороной - на дополнительную стойку.
- 3 -Ns 94349
| название | год | авторы | номер документа |
|---|---|---|---|
| Строительный башенный кран | 1959 |
|
SU125362A1 |
| Строительный башенный кран | 1960 |
|
SU133575A1 |
| Шагающий стреловой кран | 1958 |
|
SU121550A2 |
| Строительный башенный кран с телескопически раздвижной башней | 1958 |
|
SU121549A1 |
| Устройство для одновременного изготовления в вертикальном положении нескольких железобетонных изделий при помощи скользящей формы | 1958 |
|
SU122696A1 |
| УСТАНОВКА ДЛЯ ПОГРУЖЕНИЯ СВАЙ ИЛИ ШПУНТА | 1998 |
|
RU2130994C1 |
| УСТРОЙСТВО ДЛЯ НАРАЩИВАНИЯ БАШНИ КРАНА | 2002 |
|
RU2225348C1 |
| Самоподъемный кран | 1989 |
|
SU1705231A1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| САМОПОДЪЕМНЫЙ БАШЕННЫЙ КРАН | 1968 |
|
SU208221A1 |
00
и
:э
00
