иг.1 Изобретение относится к области автоматического управления и регулирования и предназначено для автоматического управления свободными коле баниями линейных динамическик объектов с существенно нестационарными параметрами, меняющимися неконтролируемым образом в любых ограниченных пределах. Предполагается, что динамика объ екта описывается уравнением (t)...a(t)-J-U{t) ,: где i 1,,,,п т переменные параметры, объекта, удовлетворяющие условиям . , где 01. I и. постоянные и известны величины, f Задача управления состоит в сведении к нулю ошибки регулирования x(-t)v(t)-v(t) далее считается (tl con5-t 0, , при любом на-Ч чальном состоянии и при обеспечении условия малой зависимости свойств управляе шж процессов в замкнутой системе от параметров объекта регулирования , Известна самонастраивающаяся система с эталонной моделью, содержащая объект управления, модель объе та управления, дифференциаторы, усилители, сумматоры, умножители 1 J. Недостатками известной схемы являются низкая надежность,сложность связанная с больип1м числом HacTpaHBae г-яых параметров, неудовлетворительное качество регулирования при сук ествен ных изменениях параметров объекта, значительная зависимость регулируемой величины от параметров объекта в переходных процессах, Наиболее близким техническим решением к данному является самонастра вающаяся система, содержащая последовательно соединенные первьй сумматор , умножитель, первьй блок сравнершя, объект управления к второй блок сравнения, второй вход которого .соед нен с выходами задатчика, а выход с входами дифЛ)еренциаторов, вьссодами соединенных через соответствую цие пе вые усилители с входами второго сумматора и через соответствуюпцие «модульные элементы - с входами вторых усилителей,, выходы которых соединены с соответствуннцими входами первого сумматораJ выход второго сумматора соединен с входом релейного элемента, выход которого подключен к второму входу умножителя, к второму входу первого блока сравнения подключен выход корректирующего звена, вход которого соединен с выходом объекта управления С2. Недостатками известного регулятора являются невысокая помехоустойчивость, наличие высокочастотных разрывов сигнала управления, высокая чувствительность к неидеальностям в реализации элементов системы. Цель изобретения - повьшение помехоустойчивости, грубости к реализации элементов системы управления, обеспечение непрерывности сигнала управления и повышение надежности. Поставленная цель достигается тем, что в систему,содержащую последовательно соединенные первый сумматор, умножитель, объект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выходс входами дифференциаторов, вьгходы которых и вьссод блока сравнения соединены через соответствующие первые усилители с входами второго сумматора и через соответствующие модульные элементы - с входами вторых усилителей, выходы которых соединены с соответствующими входами первого сумматора, выход второго сумматора соединен с входом релейного элемента, введен инерционг1ый фильтр, подклЕоченный входом к выходу релейного элемента, а выходом - к второму входу умножителя. На фиг.1 дана схема, поясняющая предложенную систему; на фиг,2 схема автоматического управления. На фиг,1 приняты следующрге обозначения: 1 - объект упра}зления, 2 - задатчик с выходным сигналом j lttsO, 3 - регулятор контура координатной обратной связи (КОС), формирующий управление U(-t),4 - задатчик координатно-параметрической обратной связи (КПОС) с выходным сигналом x.(t), 5 - регулятор контура КПОС, формируюиий сигнал ,u(t). При замыкании объекта управления обратной связью регулятором 3 получается известная обобщенная схема системы с элементами,1-3. При изменении параметров объекта неконтролируемым образом в ЕИРроких пределах такая схема не решает задачи управления. Введем контур координатно-параметрической
обратной связи (КПОС), предназначенньй для изменения в процессе управления закона КОС путем организации его надлежащей зависимости от сигнала (t). Для построения такогоконтура регулирования на решениях системы выбором задатчика 4 определяется некоторая функция x l-fc}. Выбор вида задатчика 4 и его параметров определяется совокупностью требований, предъявляемых к качеству регулирования. При этих условиях рассогласование 4 (t) X (t| - S (tj характеризует отклонение фактического поведения замкнутой системы от требуемого Регулятор КПОС-5 предназначен для сведения к нулю раСч;огласования э (i),
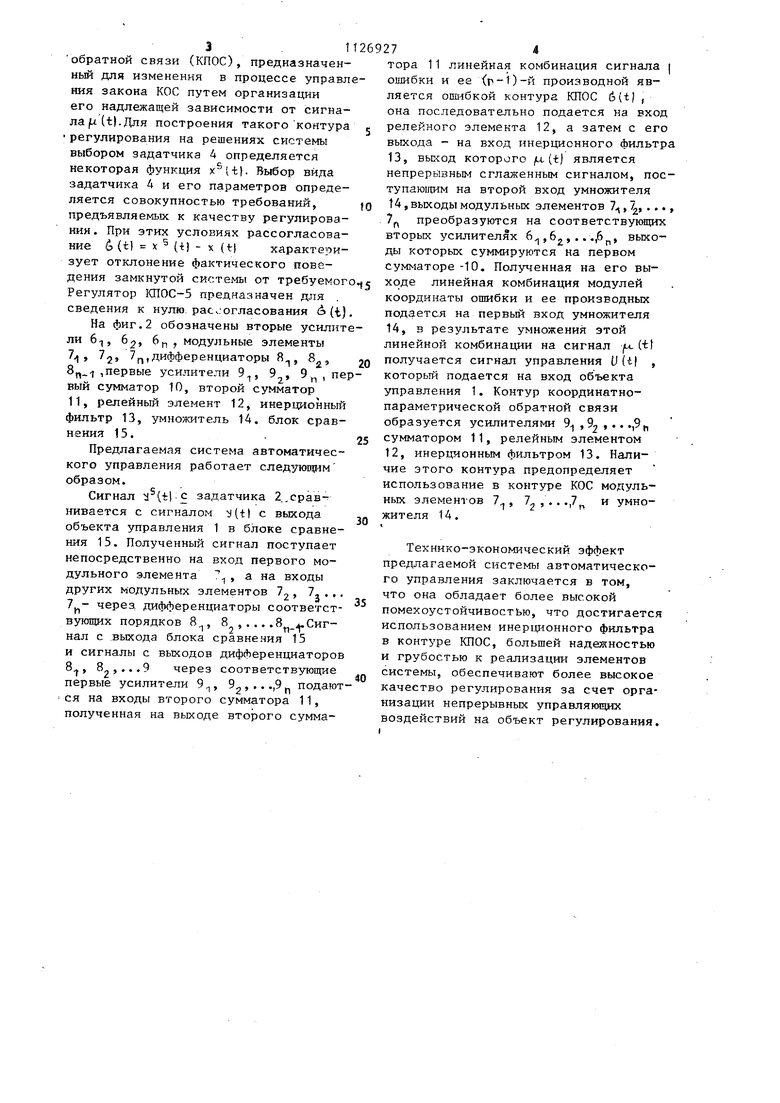
На фиг.2 обозначены вторые усилители 6-,, 62, 6f, J модульные элементы Л 2 7f,,дифференциаторы 8, 8, , ,первые усилители 9, 9., 9 , первый сумматор 10, второй сумматор 11, релейный элемент 12, инерционньп фильтр 13, умножитель 14. блок сравнения 15.Предлагаемая система автоматического управления работает следующим образом.
Сигнал (ttC задатчика 2.,сравнивается с сигналом (t| с выхода объекта управления 1 в блоке сравнения 15. Полученный сигнал поступает непосредственно на вход первого модульного элемента Т , а на входы других модульных элементов 7,., 7, ...
3
через дифференциаторы соответствующих порядков 8, 8 ,....8 Сигнал с выхода блока сравнения 15 и сигналы с выходов дифференциаторов 8, 8 ,...9 через соответствующие первые усилители 9, 92,...,9 подают ся на входы второго сумматора 11, полученная на выходе второго сумматора 11 линейная комбинация сигнала ошибки и ее (г-О-й производной является контура КПОС 6{t), она последовательно подается на вход релейного элемента 12, а затем с его вьгхода - на вход инерционного фильтр
13,выход которого /U, (-tl является непрерывным сглаженным сигналом, поступаюисим на второй вход умножителя 14,выходы модульных элементов 7,l, ... 7 преобразуются на соответствующих вторых усилителях 6 ,6j,, .. .,6, выходы которых суммируются на первом cyMNsaTope -10. Полученная на его выходе линейная комбинация модулей координаты ошибки и ее производных подается на первый вход умножителя
14,в результате умножения этой линейной комбинации на сигнал уи. (tt получается сигнал управления UUl , который подается на вход объекта управления 1. Контур координатнопараметрической обратной связи образуется усилителями 9, 92...,9 сумматором 11, релейным элементом 12, инерционным фильтром 13. Наличие этого контура предопределяет использование в контуре КОС модульных элементов 7, 7 , .. .,7 и умножителя 14.
Технико-экономический эффект предлагаемой системы автоматического управления заключается в том, что она обладает более высокой помехоустойчивостью, что достигается использованием инерционного фильтра в контуре КПОС, большей надежностью и грубостью к реализации элементов системы, обеспечивают более вьюокое качество регулирования за счет организации непрерывных управлякщих воздействий на объект регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
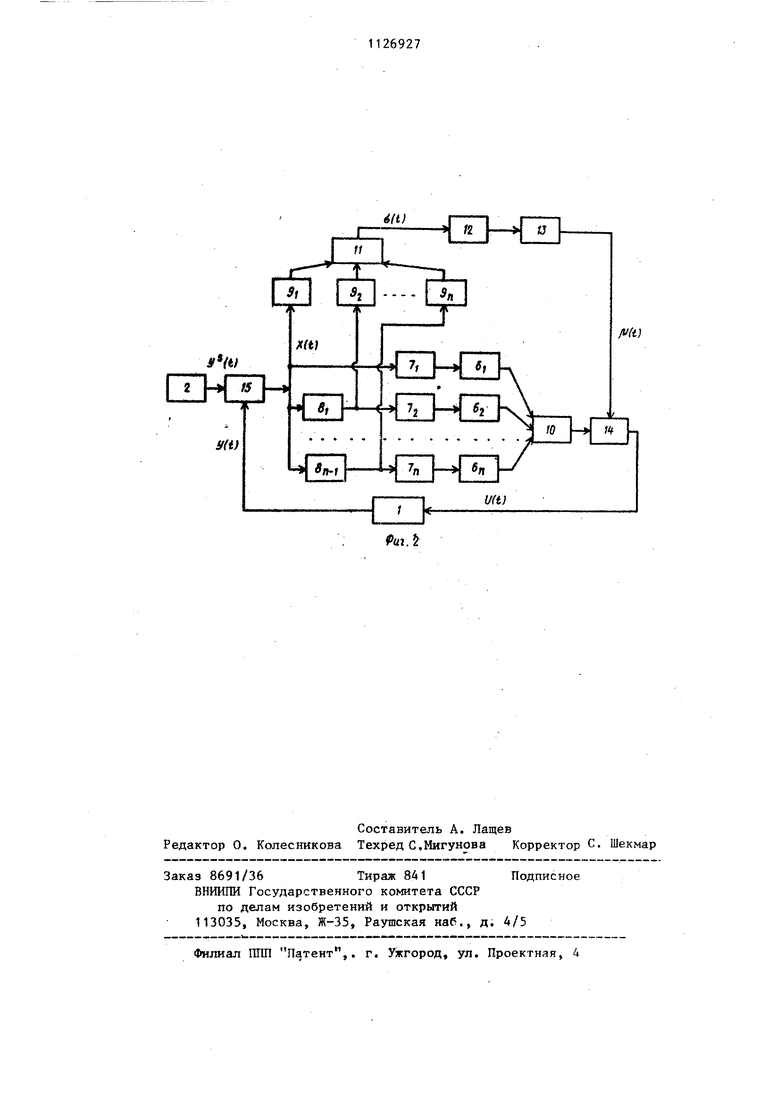
СИСТЕМА УПРАВЛЕНИЯ С КООРДИНАТНО-ПАРАМЕТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ, содержащая последовательно соединенные первый сумматор, умножитель, объект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока сравнения соединены через соответствующие первые усилители с входами второго сумматора, а через соответствующие модульные элементы - с вкодами вторых усилителей, выходы которых подключены к соответствующим входам первого сумматора, выход второго сумматора соединен с входом репейного элемента, о тличающаяся тем, что, с целью повьшения помехоустойчивости и надежности системы, она содержит инер(Л ционный фильтр, подключенный входом к выходу релейного элемента, а выхо- с дом - к второму«входу умножителя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Громыко В.Д., Санковский Е.А | |||
| Самонастраивающиеся системы с моделью | |||
| М., Энергия, 1974, с.16 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Соколов Н.И.Лекции по курсу Теория автоматического регулирования | |||
| Эквивалентные адаптивным и адаптивные САУ | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МАИ, 1972, с.55 (прототип). | |||
