(54) УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ОТРАЖЕННЫХ
ЭХОСИГНАЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования зондирования рельефа дна гидролокатором и эхолотом | 1983 |
|
SU1138810A1 |
| ИМИТАТОР ЭХОСИГНАЛА ЭХОЛОТА | 2015 |
|
RU2604170C1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1451861A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ ТОЧЕК АКУПУНКТУРЫ | 1992 |
|
RU2027403C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 1999 |
|
RU2163380C1 |
| Тензометрическое устройство с автоматической установкой нуля | 1980 |
|
SU916970A1 |
| Интегратор | 1986 |
|
SU1401485A2 |
| Устройство автоматической смены масштабов для аналоговой вычислительной машины | 1983 |
|
SU1113809A1 |
| Устройство для коррекции нелинейности | 1982 |
|
SU1056228A1 |
1
Иэобретеиие относится к области моделирования и может быть использовано в тренажерных комплексах ив устройствах, моделирующих движение судов.
Известно, вычислительное устройство для индикатора истинного движения судовой радиолокационной станции, содержащее датчик скорости, координатор, сянусно-косинусный потенциометр, двигатели, тахогенераторы, усилитель tlT .
Недостатком известного устройства 5тпяется невозможность.имитации посылки и приема гидроакустических сигналов.
Наиболее близким по технической сущности к предложенному является устройство для модетшрования рельефа дЕса, содержащее носитель информации 6 рельефе дна, блоки считьгоания, преобразователи напряжение - частота, индикатор, регистратор 2 .
Недостатком известного устройства является невозможность имитации изменения положения антенны гидролокатсра.
Цель Изобретения - повышение точности имитации.
Поставленная цель достигается тем, что в устройство для имитации отраженных эхосигналов, содержащее сумматор, преобразсфатели напряжения в частоту, первый реверсивный счетчик, цифро-аналсяхэвые преобразователи, допслнвтельно введены первый и второй зп&леугы И, интегратор, второй реверсивной счетчик, компаратор, первый и второй регукурры, причем выходы первого и второго ре гястров соединены соответствевно с нвфо1Ж1ационными входами первого и вто роге реверсивных счегчЕков, выходы которых через соответствукяцие прфро-авалсяхтые преобразователи подвлючевы к первому и втсрому входам сумматора, выход которого ооеданен с первым вхопом ROMnapaiOpe, второй вход ютораго по;ь,ключ к выходу интегратора, управляющий вход которого соединен с управпяюпщмн входами qepBoro к второго элементов И, с первыми уттравлякшшми входами реверсивных счетчиков и является сянхрошкзируюшим входом устройства, первый информационный вход задания составляющей скорости устройства через первый преобразователь напряжения в частоту соединен с информационным входом первого элемента И, которого подключен к второму управляющему входу первого реверсивного счетчика, второй информационный вход задания составляющей скорости устройства через второй преобразователь напряжения в частоту соединен с информационным входом второго элемента И, выход которого подключен к второму управляоощему входу второго реве1х:ивного счетчика, третий информационный вход задания составляющей скорости и здаформационный вход задания максимальной глубиш 1 соединены соответственно с информационным входом интегратора и с третьим входом сумматора, третьи управляющие входы реверсивных счетчиков являются соответственно входами управления реверсом реверсивных счетчиков устройства.
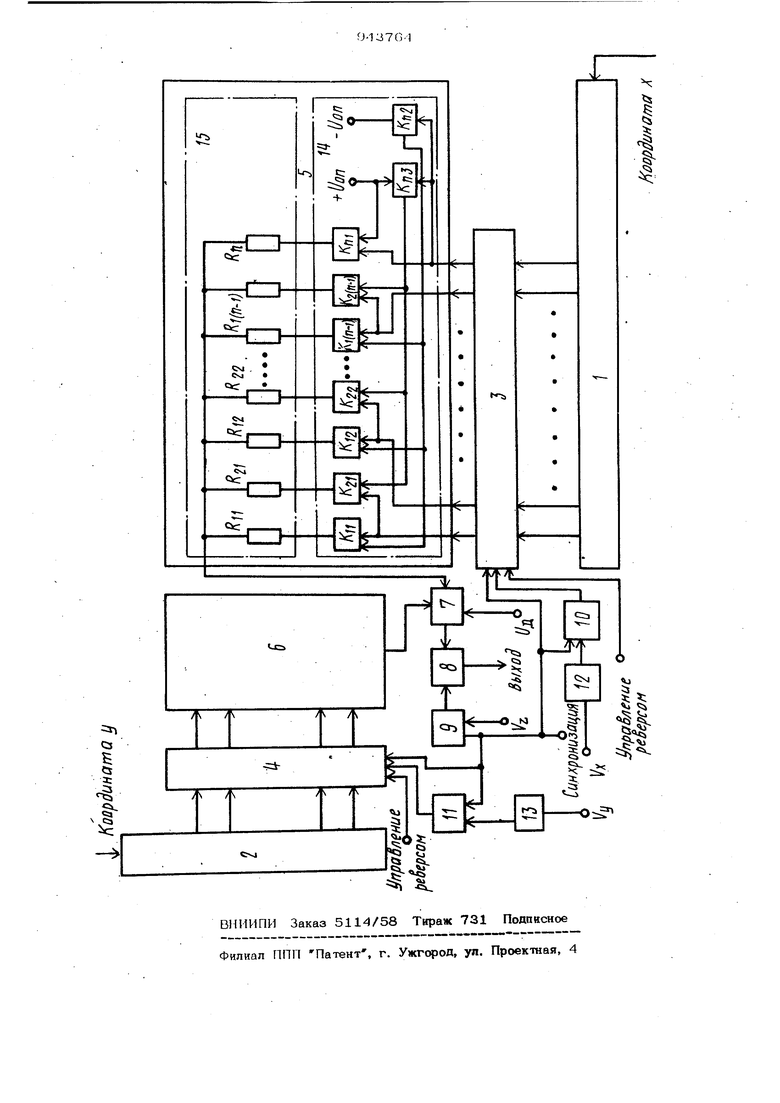
На чертеже представлена блок-схема предложенного устройства.
Ус1гройство содержит регистры 1 и 2, реверсивные счетчики 3 и 4, цифроаналоговые преобразователи 5 и 6, сумматор 7, компаратор 8, интегратор 9, элементы И 10 и 11, преобразователи напряжения в частоту 12 и 13. Каждый Ш фро-аналоговый преобразователь содержит, например, блок ключей 14, резистивную матрицу 15.
Устройство работает следующим образом.
Поверхность дна задается двумя координатными осями X и У и определяется разрядностью регистров 1 и 2. Причем координата У соответствует направлешоо на север и является осью, от которой производится отсчет углов разворота антенны гидролокатора в горизонтальной плоскости. Максимальная глубина моря в данном квадрате задается напряжением Од., поступающим на вход сумматора 7. Реверсивный двоичный счетшк 3 имеет разрядность равную и , которая определяет размер периодически повторя&лык участков дна по оси X, имеюишх одинаковый характер изменения рельефа. Си -1) разряд реверсивного счетчика 3 подключается каяодый. соответств енно к входам двух одинаковых ключей К ,
гл-- KMCM-OI ZCH-I) открывает их, исли на выходе данного разряда стоит
открываются ключи К и К , а ключ Ку,, закрывается и наоборот. На вторые входы ключей К ... К() поступает положительное напряжение C+Uon) через ключ К ,-5 , а на вторые входы ключей
К 2 ... K. подается отрицательное рпорное напряжение (.-Ооп ) через ключ Кщ .
При накоплении реверсивным счетчиком 3 числа мёяыде 2(и -1) пагюжнтельное опорное напряжение () через открытый ключ К„, и соответствующие открытые ключи К , К i(vi-i) поступает на резисторы Rac)-i) резистивной матрицы. Отрицателное опорное напряжение (-Uop ) на резистивную матрицу не поступает, так как ключ К при этом закрыт. Сопротивление
резисторов матрицы R-2.- l acviH) добрано так, что при линейном увеличе- НИН числа, записьгоаи юго в счетчике, положительное напряжение на выходе матрицы увеличивается не по линейному закону, а имеет неравномерно нарастак ший характер. При установке (и-1)
разр$одов счетчика 3 в единимое состояние с выхода матряиць 15 снимается максимальная амплитуда положительного напряжения. С приходом ц-го импульса все (и -1) разряды счетчика переходят в состояние О , а разряд ц переходит в состояние 1. При этом все ключи
К Каг. Кч(ци) . 2(и-1 закрываются и открывается ключ К , через который положительное опорное напряжение С+Ооп) поступает на резистор RH резистивной матрицы 15. Сопротивление резистора RH подбирается таким, чтобы напряжение на выходе матрицы при этом было таким же, как и в случае нахождения в единичном сосотянии (И -1) разряда счетчика. Прт дальнейщем увеличении числа, заяисьгоаемого в счетчик 3, через открытый ключ K, соответствующие открытые ключи К
... ,j,j , на входы резисторов матрицы R, ... (H) nocTyiiaeT отрицательное опорнре напряжение. Положительное счпорное напряжение на резисторы R ... Й2.(и-1) ® поступает, так как ключ
Kf,, находится в закрытом состоянии. Со 1ротивле1шя резисторов R ... RI( выбираются также из условия задания нелинейного изменения напряжения на 5i выходе матрицы 15. Таким образом, при записи в счетчик числа большего 2 (in -1) напряжение на выходе матрицы 15 уменьшается по нелинейному закону. Когда все разрядь счетчика устанавливаются в единичное состояние, т.е. отрщательным опорным напряжением (-Uon) запитаны все резисторы R., ... СП--1) положительным напряжением (Оon) запитан резистор ft. , на выход матрицы напряжение отсутствует, -что достигается подбором резисторов. После переполнения счетчкка на выходе матрицы 15 опять будет положительное напряжение, соответствующее состоянию Счетчика 3. Таким образом, каждому состоянию счетчика соответствует строго определенное напряжение на выходе матрицы. Если на вход счетчика подаются имщтшсы различной частоты следования, то с выхода матриць 15 снимается напряжение, изменятощееся во времени пропорционально входной частоте и с периодичностью, определяемой разрядностью счет чика. Начальная амплитуда изменяющего ся во времени рельефа определяется начальным состоянием счетчика 3, которо задается из резистора 1 сигналом синхронизапли через установочные входы счетчика перед циклом поступления счет ных импульсов на вход счетчика 3. Разрядность регистра 1 выше разрядности реверсивного счетчика 3, и выходы первых и разрядов регистра 1 подсоединены к установочным входам реверсивного счетчика 3. Поэтому разрядаость счетчика определяет длительность периодически повторяемых участок с одинаковым характером рельефа дна, а разрядность регистра 1 определяет количество таких повторяемых участков и размер промыслового квадрата по данной оси. Таким же образом задается рельеф дна к по координате У, характер которого задается подбором резисторов резне- ТИБНОЙ матрицы цифро-аналогового преобразователя 6, а раалер периодически повторяемых участков, их количество к размер промыслового квадрата по этой оси определяется разрядностью 4 и регистра 2. Напряжения с выходов ци4ро-аналоговых преобразователей 5 и 6 поступают на вычитающие входы сумматора 7, где они вычитаются из напряжешта Уд , про по1ндаонального даапазону глубины, и с выхода сумматора 7 снимается напряжение, которое соответствует глубине мео-16та в любой точке квадрата в зависимости от координаты данной точки. Вектор скорости р спространения зондирующего шлпульса V раскладывается на две составляющие - к v. . Вектор и 2 равен скорости распространения зондирующего импульса в вертикальной плоскости. Вектор УХ,-) равен скорости распространения зондирующего импульса в горизонтальной плоскости. В момент посьшки зонд1фующего импульса сигналом синхронизации запускается интегрютор 9, на вход которого подается напряжение, пропорциональное величине вектора v, . На1фяжениб на выходе интегратора определяет путь 5z пройденный зондирующим импульсом в вертикальной плоскости за какое- о время t от момента посылкзя, т.е. S --u-. d-t--Kv ъ. о где К - постоянный коэффициент. Это напряжение подается на вход компаратора 8, на другой вход которого подается напряжение с выхода суммато- . ра 7. К моменту посылки зондирующего импульса сигналом синхро1шза1ши в счетчики 3 и 4 записываются коды координат судна X и У. , к с выхода сумматора 7 снимается напряжение, соответствующее глубине места под судном. В момент посьтки зондирующего импульса сигналом синхронизации открываются ключи 10 и 11 на входы счетчиков 3 и 4 с преобразователей напряжения в частоту 12 и 13 поступают соответственно импульсы с частотой, соответствующей скорости распространения зондирующего импульса в горизонтальной плоскости Vy , разложенной ка составляющие к Vv, по осям промысло. вого квадрата. При этом с выхода сумматора 7 снимается напряжение, изме- някядееся во времени в соответствии с изменением глубины места под условной точкой, двизкущейся по поверзшости моря в направлении распространения зондирующего импульса со скоростью, пропорциональной горизонтальной составляющей скороста распространешш зондирующего импульса . В какой-тхэ момент времени напряжение на выходе интегратора 9 сравнивается с напряжением на выходе сумматора 7 и при этом компаратор 8 нзменярт выходной уровень. В моменты смены уровней компаратора 8 79 напряжение на выходе интегратора 9, соответствующее пути, пройденному зонШфуюшим импульсом в вертикальной плоскости, равно , где Т - время от момента посылки зондирующего иготульса до момента срабатьгоания компаратора. В момент времени Т с выхода сумма тора 7 снимается напряжение, соответствующее глубине места в точке, которая зондируется импульсом гядропокатора, так как ее координаты определяются выражением . , где X и У - координаты точки моро когхз дна, зондируемые тадропокатором. Таким образом, время Т соответствует времени от момента посылки зондирую щего импульса до момента прихода его в определенную точку морского дна, и значит время от момента посылки зондирующего импульса до момента сравне ния компаратора 8 пропо1ндаонально даль ности до грунта в данный момент времени. В зависимости от направления разворота антенны 1тодролокатора координаты Х. и У могут увеличиваться или же уменьшаться. Поэтом на входы счет SQCOB 3 и 4 поступают сигналы управл ния реверсом, которые переключают счетчики в режим суммирования или же вычитания в зависимости от угла реизворо та антенны гидролокатора в горизонтальной плоскости и от курса судна. Если скорость распространещя зондирующего импульса в водной среде рабна V , то на вход интеграт(Ч5а 9 подается напряжение и. V IHJ- , где угол разворота антенны гидролокатора в вертикальной плоскости. На вход преобразователя 12 подается напряжение Ux VSiw , где |5 - угол разворота антенны гидролокатора в горизонтальной плоскости, отсчитанной от оси У. На вход преобраэователя 13 подается напряжение Ц « Vcoe Таким образом, предлагаемое устройство благодаря наличию новых блоков и связей между ними позволяет считьтать смоделированный рельеф морского дна при движения судна в пределах квадрата с любым курсом и любым углом разворота антеь-ны гидролокатора. 64 -Характер рельефа дна и его .ампгатгу- ду можно изменить с помощью регулировки сопротивлений резисторов резистивных матриц и опорных напряжений- UonVi-и,,,Формула изобретения Устройство, ддя имиташш отраже1гаых эхосигналов, содержа)цее сумматор, преобразователи напряжения в частоту, первый реверсивный счетчик, цифро-аналого-вые преобразователи, отличающееся тем, что, с целью повышения точности имиташш, в устройство дополнительно введены первый и второй элема ты И, интегратор, второй реверсивный счетясс, компаратор, первый и второй регистры, причем выходь первого и второго регистров соединены соответственно с информационныкш входами первого и второго реверсивных счетчиков, выходы которых через соответствующие цифроаналоговые преобразователи подключены . к первому и второму входам сумматора, выход которого соединен с первым вхоROM. ко1чшаратора, второй вход которого подключен к .выходу интегратора, управляющий вход которого соединен с управляющими входами первого и второго элементов И, с первыми управляющими входами реверсивных счетчиков и является синхронизирующим входом устройства, первый информационный вход задания составляющей скорости устройства через первый преобразователь напряжения в частоту соединен с информационным вко цам первого элемента И, выход которого подключен к второму управляющему входу первого реверсивного счетчика, второй информационный вход задания составляющей скорости устройства через второй преобразователь напряжения в частоту соедамен с информационным входом вто рого элемента И, выход которого подключен к вторсалу управляющему входу второго реверсивного счетчика, третий информационный вход задания составляющей скорости и информационный вход задания максимальной глубины соединены соответственно с информациоютым входсш интегратора и с третьим входом сумматора, третьи управляющие входы реверсивных счетчиков являются соответственно входамя управления реверсом реверсивных счетчиков устройства. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 481О50, кл. G06 G 7/78, 1975. 2.Авторские свидетельство СССР № 4О9240, кл. GO6G 7/48, 1974 (прототип).
